1. Основные определения
Удивительно, но с векторными величинами разной природы (перемещением, скоростью, силой, импульсом и др.) можно работать в значительной мере единообразно — как с геометрическими объектами — геометрическими векторами, или просто векторами, хотя есть и нюансы (см. ниже).
Вектор представляет собой направленный отрезок прямой, для которого определены правила (законы) сложения с другими векторами, правило вычитания векторов, правило умножения вектора на число, скалярное произведение двух векторов и некоторые другие операции.
Стрелка компаса — не вектор, т. к. для неё нет таких операций.
Мы будем рассматривать векторы на плоскости и в соответствии со сложившейся традицией обозначать их латинскими буквами со стрелками наверху, например: `vec v`, `vec F`, `vec a`, `vec b` и т. п. Часто в целях экономии используют упрощённое обозначение — букву с чертой, например, `bar v` или `bar F`.
Одну из граничных точек вектора называют его началом, а другую — концом. Направление вектора задаётся от начала к концу, причём на чертеже конец вектора отмечают стрелкой. Начало вектора называют также точкой его приложения. Если точка `A` является началом вектора `vec a`, то мы будем говорить, что вектор `vec a` приложен в точке `A` (рис. 2).
Число, выражающее длину направленного отрезка, называют модулем вектора и обозначают той же буквой, что и сам вектор, но без стрелки наверху, например: модулем вектора `vec v` является число `v`. Часто для обозначения модуля вектора прибегают к помощи знака абсолютной величины и пишут, например, `|vec v|` или `|vec F|`.
Вектор называется нулевым, если его начало и конец совпадают. Нулевой вектор не имеет определённого направления и его длина (модуль) равна нулю.
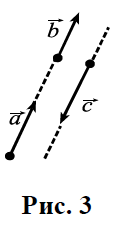
Векторы называются коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых. Так, например, на рис. 3 векторы `vec a`, `vec b` и `vec c` коллинеарны.
Два вектора называются равными, если они коллинеарны, имеют одинаковую длину и одинаковое направление.
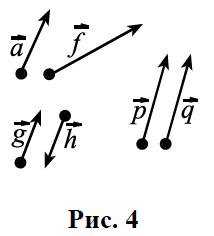
На рис. 4 слева изображены неравные векторы `vec a` и `vec f`, `vec g` и `vec h`, а справа — равные векторы `vec p` и `vec q`. Точка приложения геометрического вектора `vec a` может быть выбрана произвольно. Мы не различаем двух равных векторов, имеющих разные точки приложения и получающихся один из другого параллельным переносом. В соответствии с этим векторы, изучаемые в геометрии, называют свободными (они определены с точностью до точки приложения).
В физике точка приложения вектора иногда имеет принципиальное значение. Достаточно вспомнить рычаг: две равные по модулю силы, направленные в одну и ту же сторону, производят на рычаг разное действие, если плечи сил не равны друг другу. И всё же сами силы равны друг другу! Бывают и случаи, когда вектору трудно приписать конкретную точку приложения. Например, если одна система отсчёта движется относительно другой со скоростью `vec v`, то какой точке приписать эту скорость? Всем точкам движущейся системы!
2. Сложение двух векторов.
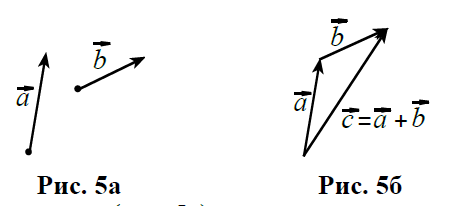
Пусть даны два произвольных вектора `vec a` и `vec b` (рис. 5а).
Для нахождения их суммы нужно перенести вектор `vec b` параллельно самому себе так, чтобы его начало совпало с концом вектора `vec a`. Тогда вектор, проведённый из начала вектора `vec a` в конец перенесённого вектора `vec b`, и будет являться суммой `vec a` и `vec b`. На рис. 5б — это вектор `vec c`.
Описанное правило есть просто определение суммы векторов. Как и в случае с числами, сумма векторов не зависит от порядка слагаемых, и поэтому можно записать
Приведённое выше правило геометрического сложения векторов называется правилом треугольника .
Сумма векторов может быть найдена и по правилу параллелограмма. В этом случае параллельным переносом нужно совместить начала векторов `vec a` и `vec b` и построить на них, как на сторонах, параллелограмм. Тогда сумма `vec a` и `vec b` будет представлять собой диагональ этого параллелограмма, конкретно — суммой `vec a` и `vec b` будет вектор, начало которого совпадает с общим началом векторов `vec a` и `vec b` конец расположен в противоположной вершине параллелограмма, а длина равна длине указанной диагонали (рис. 5в).

Оба способа сложения дают идентичный результат и одинаково часто применяются на практике. Когда речь идёт о нахождении суммы трёх и более векторов, часто последовательно используют правило треугольника. Поясним сказанное.
3. Сложение трёх и более векторов.
Пусть нужно сложить три вектора `vec a`, `vec b` и `vec d` (рис. 6).
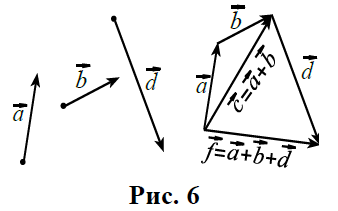
Для этого по правилу треугольника сначала находится сумма любых двух векторов, например `vec a` и `vec b`, потом полученный вектор `vec c = vec a + vec b` по тому же правилу складывается с третьим вектором `vec d`. Тогда полученный вектор `vec f = vec c + vec d` и будет представлять собой сумму трёх векторов `vec a`, `vec b` и `vec d`: `vec f = vec a + vec b + vec d`. Как и в случае с двумя векторами, порядок слагаемых не влияет на конечный результат.
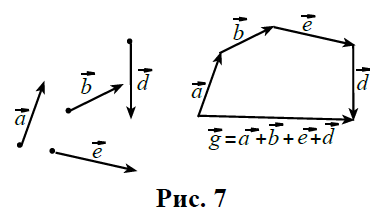
Чтобы упростить процесс сложения трёх и более векторов, обычно не находят промежуточные суммы типа `vec c = vec a + vec b`, а применяют правило многоугольника: параллельными переносами из конца первого вектора откладывают второй, из конца второго — откладывают третий, из конца третьего — четвёртый и т. д.
Так, на рис. 7 вектор `vec g` представляет собой сумму векторов `vec a`, `vec b`, `vec d`, `vec e`, найденную по правилу многоугольника: `vec g = vec a + vec b + vec d + vec e`.
Не всякая векторная сумма может иметь физический смысл. Не всякие величины вообще имеет смысл складывать. Так, например, бессмысленно говорить, что, если у меня температура `36,6^@` и у вас тоже `36,6^@`, то вместе у нас температура `73,2^@`, хотя складывать температуры (числа) никто не запрещает. Всё же чаще всего сумма температур представляет собой никому не нужную величину; она редко входит в какие-либо уравнения (входит почти случайно).
Иное дело – с массой. Если система состоит из тел с массами `m_1`, `m_2`, `m_3` и т. д., то масса всей системы равна `m = m_1 + m_2 + m_3 + ` и т. д. (Если на лифте написано, что максимальный груз, перевозимый лифтом, равен `500` кг, то перед входом в лифт нужно убедиться, что сумма масс вносимых в лифт грузов не превышает `500` кг.) Говорят, что масса – есть аддитивная величина (от английского слова add – добавлять, прибавлять, складывать). А вот температура – не аддитивная величина.
Сила есть аддитивная векторная величина. Если к телу в точке (или к системе тел в разных точках!) приложены силы `vec(F_1)`, `vec(F_2)`, `vec(F_3)` и т. д., то сумма векторов сил `vec(F_1) + vec(F_2) + vec(F_3) + . ` есть осмысленная и даже очень нужная величина. Например, в условиях равновесия тела сумма всех приложенных к нему сил `vec(F_1) + vec(F_2) + vec(F_3) + . = 0`, даже если силы приложены в разных точках тела. Причём это относится не только к твёрдым телам. Если нитка подвешена за два конца к двум гвоздям, а в промежутке перекинута еще через какие-нибудь гвозди, то сначала нужно найти силы со стороны каждого из гвоздей и силу со стороны Земли (силу тяжести) `vec F_1`, `vec(F_2)`, `vec(F_3)`, `…`; при этом говорят, что к нитке приложена сумма сил `vec(F_1) + vec(F_2) + vec(F_3) + . `; в условиях равновесия эта сумма будет равна нулю.
Не так со скоростями. Если система состоит из двух частиц, имеющих в некоторый момент времени скорости `vec(v_1)` и `vec(v_2)`, то это не означает, что в этот момент вся система обладает скоростью равной векторной сумме `vec(v_1) + vec(v_2)`. Никто не запрещает складывать векторы скорости разных частиц; но с точки зрения физики вектор `vec(v_1) + vec(v_2)` ничему приписать нельзя. В этом смысле скорость — не аддитивная величина. Суммой скоростей (векторной суммой) интересуются, когда одно движение накладывается на другое (например, Земля вращается вокруг Солнца, но вместе с Солнцем движется вокруг центра Галактики). А вот сумма скоростей отдельных частиц системы (например, сумма скоростей звезд в Галактике) физического интереса не представляет.
Родственная скорости величина, с которой вы еще не раз встретитесь в курсе физики, импульс материальной точки, равный произведению массы на скорость, `vec p = m vec v` снова — величина аддитивная.
В последнем равенстве мы встречаемся с умножением вектора на скаляр. Поясним эту процедуру.
4. Умножение вектора на скаляр.
Произведением вектора `vec a` на число `k` называют новый вектор `vec b = k vec a`, коллинеарный вектору `vec a`, направленный в ту же сторону, что и вектор `vec a`, если `k > 0`, и в противоположную сторону, если `k
Вектор силы (Определение, Пример)
ЧТО ТАКОЕ ВЕКТОР СИЛЫ
 Это то, что тянет и толкает; силы мы чувствуем, когда они на нас действуют; силы растягивают пружины, заставляют тело двигаться быстрее. Мы будем измерять силы при помощи пружинных весов. Поскольку эти приборы обычно градуируют в килограммах силы мы будем пока выражать силу тоже в килограммах силы.
Это то, что тянет и толкает; силы мы чувствуем, когда они на нас действуют; силы растягивают пружины, заставляют тело двигаться быстрее. Мы будем измерять силы при помощи пружинных весов. Поскольку эти приборы обычно градуируют в килограммах силы мы будем пока выражать силу тоже в килограммах силы.
При сооружении и проектировании мостов, зданий, кранов, машин инженеров очень заботит сложение сил или же разность сил для определения силы, необходимой для достижения равновесия. Можно показать, что силы — это векторы, т. е. они подчиняются правилу геометрического сложения.
Векторному сложению и разложению уравновешенных сил посвящен раздел физики, называемый «статикой». Это большой, но скучный раздел физики, и большинство учебников уделяет ему много места, излагая приемы решения задач инженерной статики. Мы ограничимся лишь несколькими примерами, и даже их, пожалуй, лучше было бы опустить, чтобы уделить больше времени изучению силы и движения.
Прежде всего мы должны удостовериться в том, что силы — это векторы. Сказать, что они должны быть векторами, поскольку они характеризуются величиной и направлением, недостаточно. Это не убеждает нас в том, что силы складываются геометрически.
Хотя это утверждение кажется вполне правдоподобным, особенно тем, кто имеет дело с канатами и веревками на кораблях или кому приходится заниматься разбивкой палаток, мы же должны проворить его непосредственно.
Опыт по определению вектора силы
 Часто прибегают еще к одному способу проверки. Этот способ проще, но его косвенный характер порой (не совсем добросовестно) игнорируют. К узлу прикладывают две тянущие силы FА и FВ (применяют гири и блоки или пружинные весы), а третья сила FС удерживает узел в покое. Затем при помощи построения определяется сумма сил FА и FВ .
Часто прибегают еще к одному способу проверки. Этот способ проще, но его косвенный характер порой (не совсем добросовестно) игнорируют. К узлу прикладывают две тянущие силы FА и FВ (применяют гири и блоки или пружинные весы), а третья сила FС удерживает узел в покое. Затем при помощи построения определяется сумма сил FА и FВ .
Она равна и проти воположна силе FС. Это требует дополнительного доказательства, поскольку FС не равнодействующая (сумма) двух других сил, а «равновесная» сила, необходимая, чтобы им противостоять.
Рис. Косвенная проверка векторного сложения сил.
Равновесие сил
 Если на какую-нибудь деталь крана или моста действует несколько сил сразу, а инженеру нужно, чтобы она была и оставалась в состоянии покоя, то для этого сумма всех действующих сил должна быть равна нулю. Тогда в соответствии с представлением Галилея эта деталь должна либо постоянно двигаться, либо постоянно оставаться в состоянии покоя.
Если на какую-нибудь деталь крана или моста действует несколько сил сразу, а инженеру нужно, чтобы она была и оставалась в состоянии покоя, то для этого сумма всех действующих сил должна быть равна нулю. Тогда в соответствии с представлением Галилея эта деталь должна либо постоянно двигаться, либо постоянно оставаться в состоянии покоя.
В этом случае мы говорим, что силы находятся «в равновесии». Если сумма нескольких сил равна нулю, то это должно быть видно на диаграмме векторного сложения; длина линии, соединяющей исходную точку диаграммы с конечной, должна быть равна нулю. Это означает, что векторная диаграмма должна представлять собой замкнутую фигуру.
Таким образом, если сумма сил равна нулю, то конец векторного многоугольника должен прийти обратно к началу. Это иллюстрирует рис. 3. Условие равенства нулю равнодействующей для постоянного равновесия сил должно выполняться для всей конструкции, например для всего крана или моста, но оно должно также выполняться для каждой отдельной детали конструкции, находящейся в состоянии равновесия.
Применяя это условие к какой-нибудь определенной детали, например к стреле крана, к одной опоре моста, к заклепке, связывающей воедино несколько различных деталей моста, или к грузу маятника, нужно быть внимательным и учитывать все силы, действующие на данную деталь. Тогда мы сможем утверждать, что имеем полный набор сил, образующих замкнутую векторную диаграмму, если, конечно, деталь находится в равновесии.
При решении задач не следует включать в рассмотрение силы, приложенные к другим деталям. Сначала выберите и пометьте выбранную деталь, которая, как вы считаете, находится в равновесии.
Равновесие трех сил, треугольник сил
 Если три силы находятся в равновесии, то их векторная диаграмма должна представлять собой замкнутый треугольник (рис. 4). Если известны две силы, то можно вычислить величину и направление третьей.
Если три силы находятся в равновесии, то их векторная диаграмма должна представлять собой замкнутый треугольник (рис. 4). Если известны две силы, то можно вычислить величину и направление третьей.
а — три силы в равновесии) б — три силы не находятся в равновесии.
Этим пользуются при решении инженерных задач. Во многих конструкциях на каждую деталь, играющую важную роль, действуют как раз три силы. Чтобы конструкция была устойчивей, каждая деталь должна оставаться в состоянии покоя; сумма всех действующих на нее сил должна быть равна нулю. Таким образом, если к любой детали приложены три силы, мы строим для них замкнутый треугольник.
Похожие страницы:
Понравилась статья поделись ей
Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Правило параллелограмма и правило многоугольника
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Пример 1
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
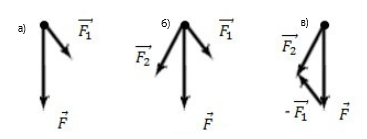
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
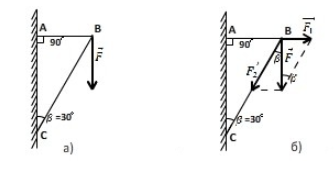
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .