Содержание:
- Система координат в пространстве
- Декартова система координат в пространстве
- Расстояние между двумя точками
- Уравнение сферы и шара
- Координаты середины отрезка
- Векторы в пространстве и действия над ними
- Векторы в пространстве
- Действия над векторами в пространстве
- Свойства суммы векторов
- Правило треугольника сложения векторов
- Правило параллелограмма сложения векторов
- Правило многоугольника сложения векторов
- Коллинеарные и компланарные векторы
- Скалярное произведение векторов
- Свойства скалярного произведения векторов
- Преобразование и подобие в пространстве
- Геометрические преобразования в пространстве
- Движение и параллельный перенос
- Центральная симметрия в пространстве
- Симметрия относительно плоскости
- Поворот и симметрия относительно оси
- Симметрия в природе и технике
- Подобие пространственных фигур
- Нормальный вектор плоскости, координаты нормального вектора плоскости
- Нормальный вектор плоскости – определение, примеры, иллюстрации
- Координаты нормального вектора плоскости – нахождение координат нормального вектора плоскости из уравнения плоскости
- Общее уравнение плоскости
- Неполные уравнения плоскости
Система координат в пространстве
Декартова система координат в пространстве
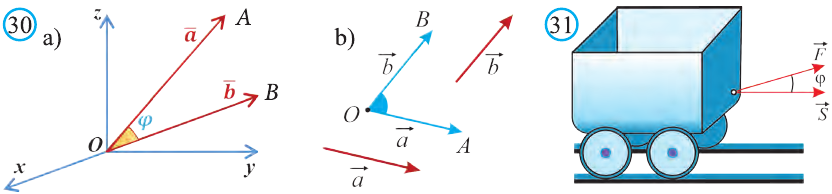
Вы познакомились с декартовой системой координат на плоскости в предыдущих классах. Систему координат в пространстве введём аналогично тому, как это было сделано на плоскости. Рассмотрим три взаимно перпендикулярных оси Ох, Оу и Оz, пересекающихся в точке О, являющейся началом координат. Через каждую пару этих прямых проведём плоскости Оху, 0xz и Оуz (рис. 1). Таким образом вводится система координат в пространстве, при этом
точку О — называют началом координат, прямые Ох, Оу и Оz — осями координат, Ох — ось абсцисс, Оу — ось ординат и Оz — ось аппликат, плоскости Оху, Оуz и Охz — координатными плоскостями.
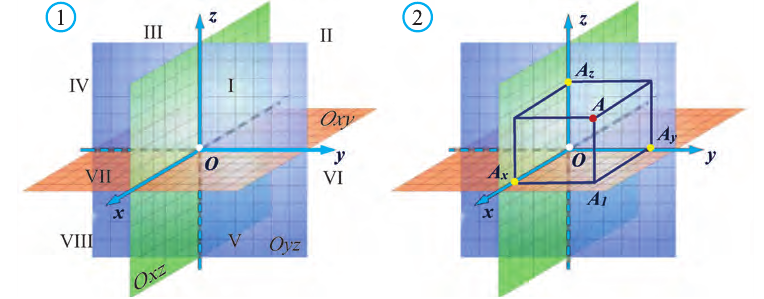
Координатные плоскости делят пространство на 8 октант (получетвертей) (рис. 1).
Пусть в пространстве задана произвольная точка А. Через эту точку проведём плоскости, перпендикулярные плоскостям Охz, Оуz и Охz (рис. 2). Одна из этих плоскостей пересечёт ось Ох в точке Ах.
Координату Ах на оси Ох называют координатой х или абсциссой точки А.
Аналогично определяют у — координату (ординату) и z- координату (аппликату) точки А.
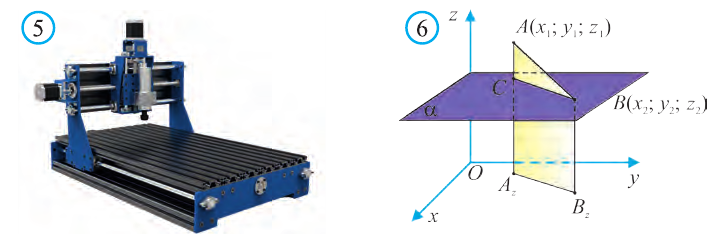
Координаты точки А записывают в виде А (х; у; z) или короче (х; у; z). Точки, изображённые на рисунке 3, имеют следующие координаты: А (0; 5; 0), B (4; 0; 0), М (0; 5; 4), К (2; 3; 4), Р (-2; 3; -4). 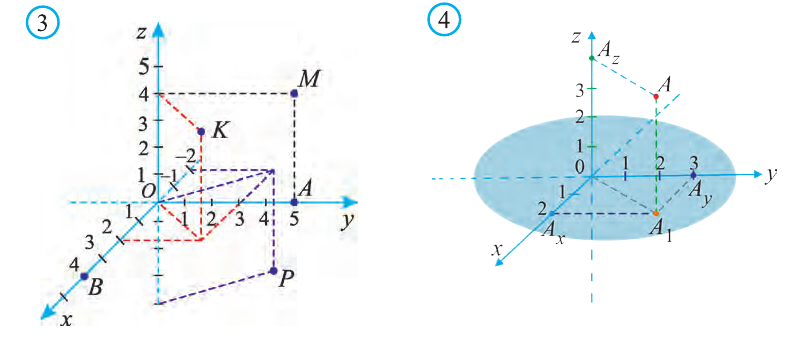
Пример:
Пусть в пространстве в декартовой системе координат
задана точка А (2; 3; 4). Где она расположена?
Решение:
От начала координат в положительном направлении осей Ох и Оу отложим отрезки ОАх = 2 и ОАу = 3 (рис. 4).
Через точку Ах проведём прямую, лежащую в плоскости Оху и параллельную оси Оу. А через точку Аy проведём прямую, лежащую в плоскости Оху и параллельную оси Ох. Точку пересечения этих прямых обозначим A1 . Через точку A1 проведём прямую, перпендикулярную плоскости Оху и на ней в положительном направлении Oz отложим отрезок АА1 = 4. Тогда точка А (2; 3; 4) и будет искомой точкой. 
Пользуясь системой координат, созданной для современных программируемых станков и автоматизированных роботов, составляются программы, на основе которых обрабатываются металлы (рис. 5).
Расстояние между двумя точками
1.Сначала рассмотрим случай, когда прямая АВ не параллельна оси Оz (рис. 6). Через точки А и В проведём прямые, параллельные оси Оz. И пусть они пересекают плоскость Оху в точках Аz и Вz .
Координаты х и у этих точек соответственно равны координатам х и у точек А, В, а координаты z равны 0.
Теперь через точку В проведём плоскость а, параллельную плоскости Оху. Она пересечёт прямую ААz в некоторой точке С.
По теореме Пифагора: АВ 2 = АС 2 + СВ 2 .
Однако 
Поэтому 
2.Пусть отрезок АВ параллелен оси Оz, тогда 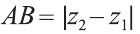 и, так как
и, так как
Следовательно, расстояние между двумя точками А и В:
(1)
Примечание. Формула (1) выражает длину диагонали прямоугольного параллелепипеда, измерения которого равны 
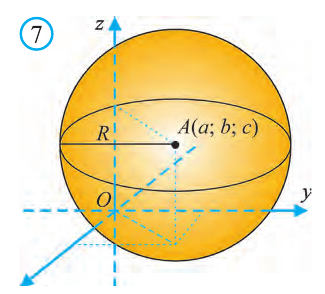
Уравнение сферы и шара
Известно, что множество всех точек М (х; у; z), расположенных на расстоянии R от данной точки А (а; Ь; с) образуют сферу (рис. 7). Тогда по формуле (1) координаты всех точек, расположенных на сфере радиуса R с центром в точке А (а; b; с), удовлетворяют равенству 
Отсюда, ясно, что неравенство для точек шара радиуса R с центром в
точке А (а; b; с) имеет вид: 
Пример:
Найдите периметр треугольника ABC с вершинами в
Решение:
Р=АВ+АС+ВС периметр треугольника ABC. Воспользовавшись формулой  расстояния между двумя точками, найдём длины сторон треугольника:
расстояния между двумя точками, найдём длины сторон треугольника:
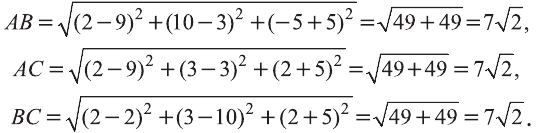
Следовательно, треугольник ABC равносторонний и его периметр  .
.
Ответ: 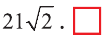
Координаты середины отрезка
Пусть А (x1; y1;z1) и В (х2; у2; z2) — произвольные точки, точка С (х; у; z) середина отрезка AB (рис. 8). 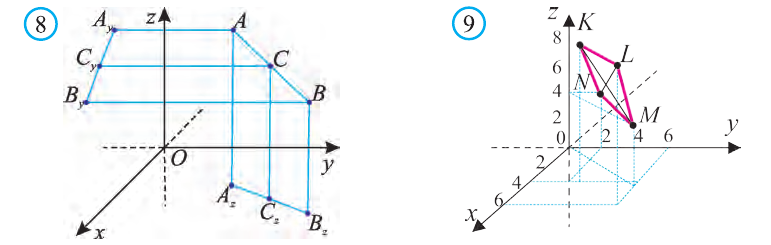
Через точки А, В и С проведём прямые, параллельные оси пересекающие плоскость Оху в точках  и
и  . Тогда по теореме Фалеса точка Сz — середина отрезка АzВz.
. Тогда по теореме Фалеса точка Сz — середина отрезка АzВz.
Отсюда по формулам нахождения координат середины отрезка на плоскости 
Чтобы найти координату z, нужно вместо плоскости Оху рассмотреть плоскость 0xz или Оуz.
Тогда и для z получим формулу, подобную вышеприведённой.

Аналогично, используя координаты концов A и B отрезка AB, по формулам 
находят координаты точки Р(х1;у]; г,), делящей отрезок АВ в отношении X САР: РВ = X).
Доказательство: Для решения задачи используем признак параллелограмма: Четырёхугольник, точка пересечения диагоналей которого делит их пополам, является параллелограммом.
Координаты середины отрезка МК:

Координаты середины отрезка NL:

Координаты середин отрезков МК и NL равны. Это говорит о том, что отрезки пeрeсeкаются и в точке пeрeсeчeния делятся пополам. Следовательно, четырёхугольник MNLK — параллелограмм.
В переписке с известным целителем и математиком Абу Али ибн Сино Абу Райхон Беруни задаёт следующий вопрос: «Почему Аристотель и другие (философы) называют шесть сторон?»
Рассматривая шестисторонний куб, Беруни говорит о фигурах «с другим количеством сторон» и добавляет, что «шарообразные фигуры не имеют сторон.» А Ибн Сино отвечает, что «во всех случаях нужно считать, что сторон шесть, так как у каждой фигуры, независимо от её формы, есть три измерения — длина, глубина и ширина».
Здесь Ибн Сино имеет ввиду три координаты, именуемые условно «шесть сторон».
В произведении «Канон Масъуда» Беруни приводит точное математическое определение шести сторон: «Сторон шесть, так как они ограничивают движение фигур по своим измерениям. Измерений три: длина, ширина и глубина. А их в два раза больше самих измерений.»
В предыдущих книгах автор определяет положение небесных тел с помощью двух координат относительно небесной сферы — эклиптического уравнения. Либо через те же координаты, но относительно небесного экватора или горизонта. Однако при определении взаимного расположения звёзд и небесных светил придётся учитывать и случаи затмений. Вот в таких случаях появляется необходимость в третьей сферической координате. Эта необходимость привела Беруни к отказу от теории небесных координат.
Векторы в пространстве и действия над ними
Векторы в пространстве
Понятие вектора в пространстве вводят также как на плоскости.
Вектором в пространстве называют направленный отрезок. Основные понятия, относящиеся к векторам в пространстве, аналогичны этим понятиям на плоскости: длина (модуль), направление вектора, равенство векторов.
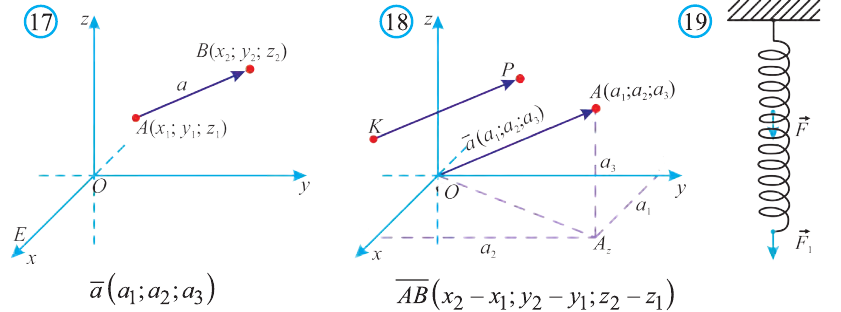
Координатами вектора с началом в точке А (х1; у1; z1) и концом в точке В (х1; у1; z1) называют числа  , (рис. 17).
, (рис. 17).
Приведем без доказательства свойства векторов, аналогичных свойствам на плоскости.
Также как на плоскости, соответствующие координаты равных векторов равны и, обратно, векторы с равными координатами равны.
Hа основании этого вектор можно обозначить как  или
или  или кратко
или кратко  (рис. 18).
(рис. 18).
Вектор можно записать и без координат  (или
(или  ). В этой записи
). В этой записи
на первом месте начало вектора, а на втором — конец.
Вектор с координатами, равными нулю, называют нулевым вектором и обозначают  или
или  , направление этого вектора не определено.
, направление этого вектора не определено.
Если начало вектора расположено в начале координат О, а числа а1,
координатами вектора  :
:  (а1; а2; а3).
(а1; а2; а3).
Однако вектор в пространстве  с началом в точке К(с1; с2; с3) и концом в точке
с началом в точке К(с1; с2; с3) и концом в точке  будет иметь те же координаты:
будет иметь те же координаты:  .
.
Отсюда следует, что вектор можно приложить к любой точке пространства. В геометрии мы рассматриваем такие свободные векторы. Но в физике, обычно вектор связан с некоторой точкой. Например, воздействие силы приложенная к пружине F на рисунке 19 зависит от точки её приложения.
Длинной вектора называют длину направленного отрезка
изображающего его (рис. 17). Длину вектора  записывают
записывают
так . Длина вектора
. Длина вектора  , заданного координатами,
, заданного координатами,
вычисляется по формуле  .
.
Пример:
Даны точки А (2; 7;-3),В (1; 0; 3), С (-3;-4; 5) и D (-2; 3; -1). Какие из векторов  и
и  равны между собой?
равны между собой?
Решение:
У равных векторов равны соответствующие координаты. Поэтому найдём координаты векторов:

Следовательно,  .
.
Докажите самостоятельно, что 
Действия над векторами в пространстве
Действия над векторами. Сложение векторов, умножение на число и их скалярное произведение определяется также как на плоскости.
Суммой векторов и  (b1; b2; b3); называют вектор
(b1; b2; b3); называют вектор  (рис. 20).
(рис. 20).
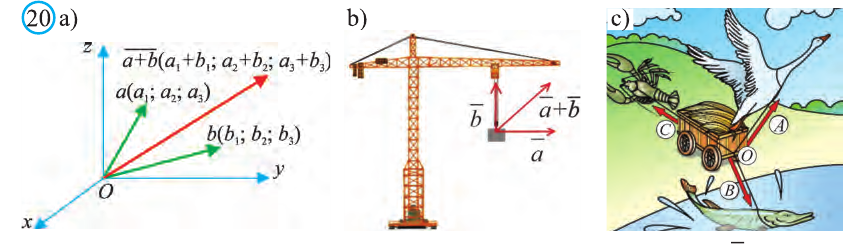
Пусть кран на рисунке 20.b движется вдоль вектора , а груз относительно крана вдоль вектора  . В результате груз движется вдоль вектора
. В результате груз движется вдоль вектора  . Поэтому из рисунка 20.с, на котором изображён сюжeт басни русского писателя И.А.Крылова, ясно, что герои басни не смогут сдвинуть телегу с места.
. Поэтому из рисунка 20.с, на котором изображён сюжeт басни русского писателя И.А.Крылова, ясно, что герои басни не смогут сдвинуть телегу с места.
Свойства суммы векторов
Для любых векторов  ,
,  и
и  имеют место следующие свойства:
имеют место следующие свойства:
a)  — переместительный закон сложения векторов;
— переместительный закон сложения векторов;
b)  — распределительный закон сложения.
— распределительный закон сложения.
Правило треугольника сложения векторов
Для любых точек А, В и С (рис. 21): 
Правило параллелограмма сложения векторов
Если АВСD — параллелограмм (рис. 22), то 
Правило многоугольника сложения векторов
Если точки А, В, С, D и Е — вершины многоугольника (рис. 23), то
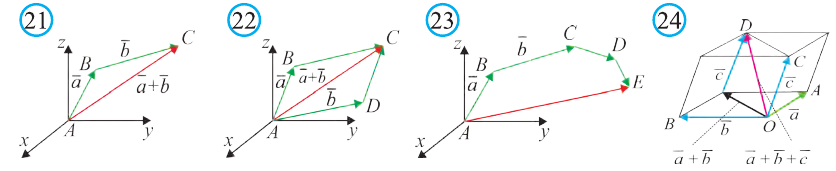
Правило параллелепипеда сложения трёх векторов, не лежащих в одной плоскости. Если АВСDА1В1С1D1 параллелепипед (рис. 24), то
 .
.
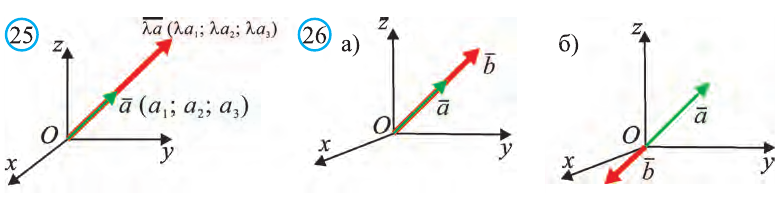
Вектор 
 = (a1; a2; a3) — называют умножением вектора
= (a1; a2; a3) — называют умножением вектора
(a1; a2; a3) на число  (рис. 25). Свойства операции умножения вектора на число.
(рис. 25). Свойства операции умножения вектора на число.
Для любых векторов и и чисел  и
и 
а) ;
;
b) ;
;
c)  и направление вектора
и направление вектора
совпадает с направлением вектора , если  ,
,
противоположно направлению вектора , если  .
. 
Коллинеарные и компланарные векторы
Пусть заданы ненулевые векторы и  . Если векторы
. Если векторы
и сонаправлены или противоположно направлены,
то их называют коллинеарными векторами (рис. 26).
Свойство 1. Если для векторов и имеет место равенство 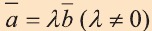 , то они коллинеарны и наоборот.
, то они коллинеарны и наоборот.
Если  , то векторы и сонаправлены
, то векторы и сонаправлены  , если
, если , то
, то
противоположно направлены  .
.
Свойство 2. Если векторы (a1; a2; a3) и (b1; b2; b3) коллинеарны,
то их соответствующие координаты пропорциональны:
 и наоборот.
и наоборот.
Пример:
Найдите вектор с началом в точке А (1; 1; 1) и концом в точке В, лежащей в плоскости Оху, коллинеарный вектору ( 1; 2; 3).
Решение:
Пусть точка В имеет координаты В (х; у; z). Так как точка В лежит в плоскости Оху, то z=0. Тогда  (х — 1 ;у — 1; — 1).
(х — 1 ;у — 1; — 1).
По условию задачи векторы (х — 1 ;у — 1; — 1) и (1, 2, 3) коллинеарны. Следовательно, их координаты пропорциональны.
Тогда получаем следующие пропорции  .
.
Откуда находим  ,
,  .
.
Итак,
Векторы, лежащие в одной плоскости или параллельных плоскостях, называют компланарными векторами (рис. 27). 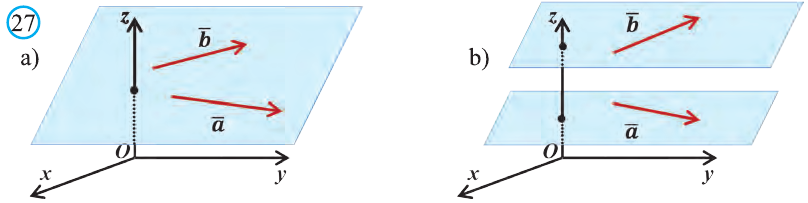
Векторы  (1; 0; 0),
(1; 0; 0),  (0; 1; 0) и
(0; 1; 0) и  (0; 0; 1) называют ортами (рис. 28).
(0; 0; 1) называют ортами (рис. 28).
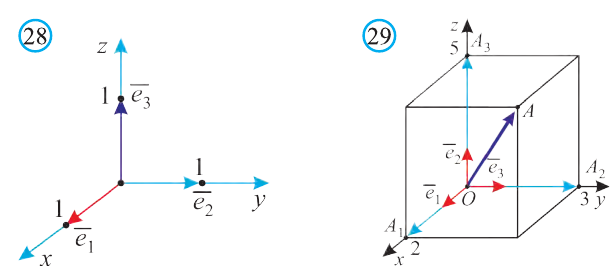
Любой вектор 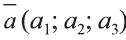 можно единственным образом разложить по ортам, то есть представить в виде
можно единственным образом разложить по ортам, то есть представить в виде  (рис. 29).
(рис. 29).
Точно также, если заданы три нeкомпланарных вектора  и
и  , то любой вектор
, то любой вектор  можно единственным образом представить в виде:
можно единственным образом представить в виде:
 .
.
Здесь  некоторые действительные числа. Тогда говорят, что вектор разложен по заданным векторам.
некоторые действительные числа. Тогда говорят, что вектор разложен по заданным векторам.
Скалярное произведение векторов
Углом между ненулевыми векторами и называют угол между направленными отрезками векторов  = и
= и  =, исходящих из точки О (рис. 30).
=, исходящих из точки О (рис. 30).
Угол между векторами и обозначают так  .
.
Скалярным произведением векторов и называют произведение длин этих векторов на косинус угла между ними.
Если один из векторов нулевой, то скалярное произведение этих векторов равно нулю.
Скалярное произведение обозначают  или
или  . По определению
. По определению  (1)
(1)
Из определения следует, что если скалярное произведение векторов и равно нулю, то эти векторы перпендикулярны и наоборот.
В физике работа A, выполненная при движении тела на расстоянии  , под воздействием силы
, под воздействием силы  (рис. 31), равна скалярному произведению силы
(рис. 31), равна скалярному произведению силы  на расстояние
на расстояние :
: 
Свойство. Если и (b1; b2; b3), то ( ) =
) = 
Доказательство. Приложим векторы и к началу
координат О (рис.32). Тогда = 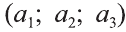 и
и  = (b1; b2; b3).
= (b1; b2; b3).
Если векторы неколлинеарны, то получаем треугольник АВО , для которого справедлива теорема косинусов.

Тогда  .
.
Однако, 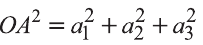 ,
,
и  .
.
Следовательно,

 .
.
Самостоятельно докажите, что и в случае, когда данные векторы коллинеарны  , также выполняется
, также выполняется
это равенство. 
Свойства скалярного произведения векторов
1.  — переместительное свойство.
— переместительное свойство.
2.  — распределительное свойство.
— распределительное свойство.
3.  — сочетательное свойство.
— сочетательное свойство.
4.Если векторы а и b являются сонаправленными коллинеарными
векторами, то  , так как соs 0° = 1.
, так как соs 0° = 1.
5.Если же векторы противоположно направлены, то  , так как cos l80° = -1.
, так как cos l80° = -1.
6.  .
.
7. Если вектор перпендикулярен вектору , то  . Следствия: а) Длина вектора
. Следствия: а) Длина вектора  ; (1) b) косинус угла между векторами
; (1) b) косинус угла между векторами
 :
:  ; (2)
; (2)
с) условие перпендикулярности векторов  и
и
 .
.
 (3)
(3)
Пример:
 — заданные точки. Найдите косинус угла между векторами
— заданные точки. Найдите косинус угла между векторами  .
.
Решение:
Найдём длины векторов  :
:
 ,
,
 .
.
 ,
,
 .
.

Пример:
Найдите угол между векторами  .
.
Решение:
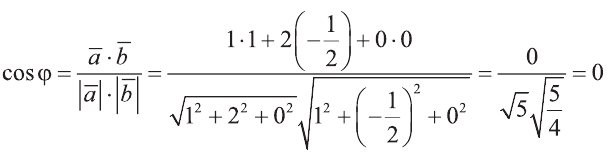 Итак,
Итак, 
Пример:
Найдите  , если
, если  ,
,  и угол между векторами
и угол между векторами и
и  равен
равен  .
.
Решение:


Пример:
Найдите координаты и длины векторов 1) ; 2)
; 2) , если
, если  .
.
Решение:
Подставим в выражения искомых векторов разложения векторов и по координатам:
1)
 . Следовательно,
. Следовательно, .
.
Тогда .
.
2)

 .
.
Следовательно,  .
.
Тогда 
Пример:
Найдите произведение , если угол между векторами и равен 30° и
, если угол между векторами и равен 30° и  ,
,  .
.
Решение:
Сначала найдём поизведение векторов и :
 .
.
Затем перемножим заданные выражения как многочлены
и, пользуясь распределительным свойством умножения
вектора на число, получим:

 .
.
Учитывая, что  ,
,
 найдём искомое произведение
найдём искомое произведение

Преобразование и подобие в пространстве
Геометрические преобразования в пространстве
Если каждую точку заданной в пространстве фигуры F изменить одним и тем же способом, то получим фигуру F1. Если при этом преобразовании различные точки первой фигуры переходят в различные точки второй, то говорят о преобразовании геометрической фигуры.
Если рассматривать все пространства как геометрическую фигуру, то также можно говорить о преобразовании геометрической фигуры.
Понятие геометрического преобразование в пространстве вводят также как на плоскости. Следовательно, свойства некоторых рассматриваeмых ниже видов преобразований и их доказательства также подобны соответствующим им на плоскости. Поэтому, мы не будем доказывать их и рекомендуем провести их самостоятельно.
Движение и параллельный перенос
Преобразование фигур, при котором сохраняются расстояния между точками, называют движением. Можно привести следующие свойства движения. При движении прямая переходит в прямую, луч — в луч, отрезок — в равный ему отрезок, угол — в равный ему угол, треугольник — в равный ему треугольник, плоскость — в плоскость, тетраэдр — в равный ему тетраэдр.
В пространстве фигуры, которые можно перевести одну в другую при некотором движении называют равными фигурами.
Простейшим примером движения является параллельный перенос.
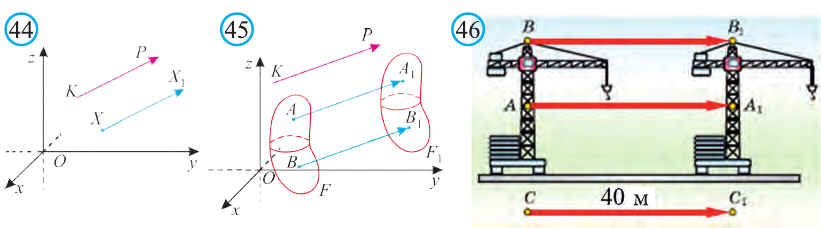
Пусть в пространстве даны вектор  и произвольная точка Х
и произвольная точка Х
(рис. 44). Говорят, что точка Х перешла в точку X1 параллельным
переносом на вектор , если выполняется условие  . Если каждую точку фигуры F сдвинуть на вектор при помощи параллельного переноса (рис. 45), то получим фигуру F1. Тогда говорят, что фигура F получена параллельным переносом фигуры F1 . При параллельном переносе каждая точка фигуры F сдвигается в одном и том же направлении на одно и то же расстояние.
. Если каждую точку фигуры F сдвинуть на вектор при помощи параллельного переноса (рис. 45), то получим фигуру F1. Тогда говорят, что фигура F получена параллельным переносом фигуры F1 . При параллельном переносе каждая точка фигуры F сдвигается в одном и том же направлении на одно и то же расстояние.
Каждая точка подъёмного крана, изображённого на рисунке 46, параллельно перенесена на 40 м относительно начального положения.
Ясно, что параллельный перенос является движением. Поэтому прямая переходит в прямую, луч — в луч, плоскость — в плоскость,
Пусть точка  фигуры F перешла в точку
фигуры F перешла в точку 
фигуры F1 при помощи параллельного переноса
на вектор  .
.
Тогда по определению получим:
 или
или
 .
.
Эти равенства называют формулами параллельного переноса.
Пример:
В какую точку перейдёт точка Р (-2; 4; 6) при параллельном переносе на вектор  = (3; 2; 5)?
= (3; 2; 5)?
Решение:
По вышеприведённым формулам параллельного переноса:  .
.
Ответ:  .
.
Центральная симметрия в пространстве
Если в пространстве  , то есть точка О — середина отрезка АА1 то точки А и А1 называют симметричными относительно точки О.
, то есть точка О — середина отрезка АА1 то точки А и А1 называют симметричными относительно точки О.
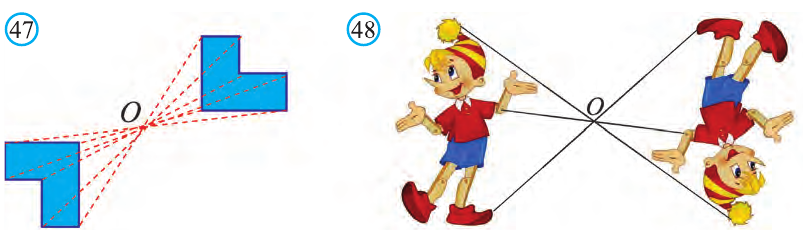
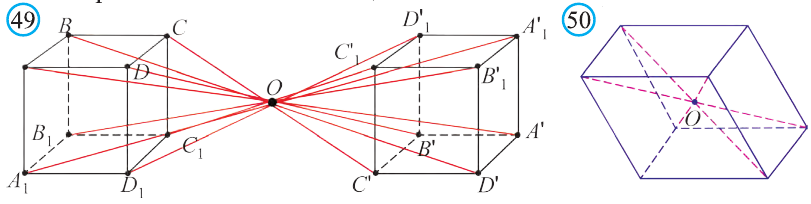
Если в пространстве каждая точка фигуры F переходит в точку, симметричную относительно точки О (рис. 47), то такое преобразование называют симметрией относительно точки О. На рисунках 48, 49 изображёны фигуры симметричные относительно точки О. Симметрия относительно точки является движением.
Если при симметрии относительно точки О фигура F переходит в себя, то её называют центрально симметричной фигурой.
Например, диагонали параллелепипеда (рис. 50) относительно их точки пересечения О являются центрально симметричными фигурами.
Пример:
В какую точку перейдет точка A = (1; 2; 3) при симметрии относительно точки О (2; 4; 6)?
Решение:
Пусть А1 = (х; у; z) — искомая точка. По определению точка
О — середина отрезка АА1. Следовательно,

Из этих уравнений получаем:
 .
.
Ответ: 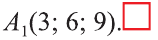
Симметрия относительно плоскости
Точки А и А1 называют симметричными относительно плоскости а,
если плоскость перпендикулярна отрезку и делит его пополам (рис. 51). Фигуры F1, и F2 на рисунке 52 симметричны относительно
плоскости а. Очевидно, что наш силуэт и его отражение симметричны относительно плоскости зеркала (рис. 53).
Симметрия относительно плоскости а является движением. 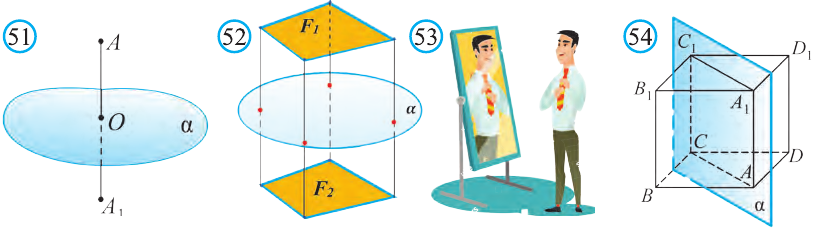
Поэтому при симметрии относительно плоскости а отрезок переходит в равный ему отрезок, прямая — в прямую, плоскость — в плоскость.
Если при симмeтрии относительно плоскости фигура F переходит в себя, то её называют фигурой симметричной относительно плоскости.
Например, изображённый на рисунке 54 куб, есть фигура, симметричная относительно плоскости а, проходящей через его диагонали АА1 и СС1.
Поворот и симметрия относительно оси
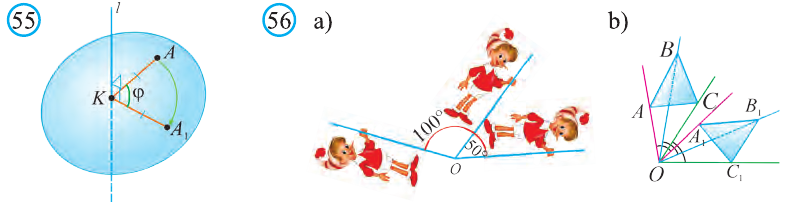
Пусть в пространстве заданы точки А и А1 и прямая l. Если перпендикуляры АК и А1К, опущенные на прямую l, равны и образуют угол  , то говорят, что точка А перешла в точку А1 в результате поворота на угол относительно прямой l (рис. 55).
, то говорят, что точка А перешла в точку А1 в результате поворота на угол относительно прямой l (рис. 55).
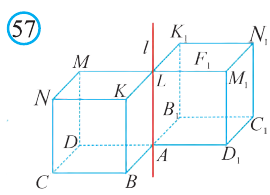
Если каждую точку фигуры F повернуть на угол относительно прямой l, то получим новую фигуру F1 . Тогда говорят, что фигура F перешла в фигуру F1 с помощью поворота на угол относительно прямой l. На рисунке 56 мы видим фигуры, полученные таким поворотом. Например, повернув куб, изображённый на рисунке 57, на 180° относительно прямой l, получим новый куб.
Поворот относительно прямой также является движением.
Поворот на 180° относительно прямой l называют симметрией относительно прямой l.
Центр, ось и плоскость симметрии называют элементами симметрии. Точки, симметричные точке А (х; у; z) относительно координатных плоскостей, координатных осей и начала координат, будут иметь следующие координаты:

Симметрия в природе и технике
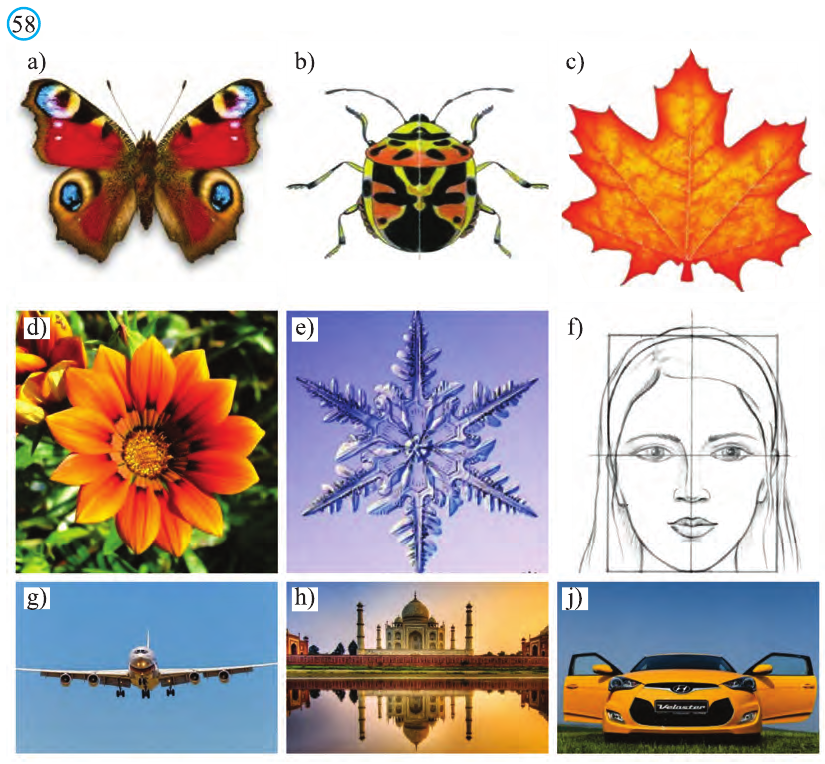
В природе на каждом шагу можно встретить симметрию.
Например, множество живых существ, в частности тела человека и животных, листья растений и цветы устроены симметрично (рис. 58). Также в неживой природе есть элементы, например, снежинки, кристаллы соли. Молекулярное строение веществ тоже состоит из симметричных фигур. Это, конечно, неспроста, поскольку симметричные фигуры не только красивы, но и самые устойчивые.
Раз так, то можно считать, что красота и совершенство природы построены на основе симметрии. Взяв за основу природную красоту и совершенство, строители, инженеры и архитекторы создают строения и механизмы, здания и сооружения, технику и транспортные средства симметричными. В этой работе им очень помогает наука геометрия.
Подобие пространственных фигур
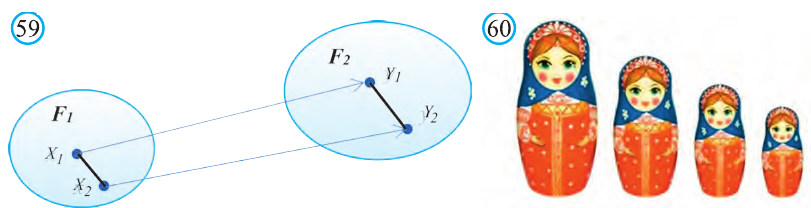
Пусть  и преобразование переводят фигуру F1, в фигуру F2. Если
и преобразование переводят фигуру F1, в фигуру F2. Если
при этом преобразовании для произвольных точек X1 и Х2 фигуры F1 и соответствующих им точек Y1 и Y2 фигуры  , то это преобразование называют преобразованием подобия (рис. 59).
, то это преобразование называют преобразованием подобия (рис. 59).
Как видим, понятие преобразования подобия в пространстве вводится также как на плоскости. Следовательно, рассматриваемые ниже виды подобия, их свойства и доказательства этих свойств подобны соответствующим на плоскости. Поэтому, мы не будем останавливаться на их доказательствах и рекомендуем провести их самостоятельно. Преобразование подобия в пространстве отображает прямую в прямую, луч в луч, отрезок в отрезок и угол в угол. Точно также это преобразование плоскость отображает в плоскость.
Если в пространстве одна из фигур перешла в другую с помощью преобразования подобия, то эти фигуры называют подобными.
Пусть в пространстве задана фигура F, точка О и число к  . Преобразование, переводящее произвольную точку X фигуры F в точку Х1 удовлетворяющую условию
. Преобразование, переводящее произвольную точку X фигуры F в точку Х1 удовлетворяющую условию  , называют гомотетией относительно центра О с коэффициентом
, называют гомотетией относительно центра О с коэффициентом  (рис. 61). Точку О называют центром гомотетии, а число коэффициентом гомотетии. Если в результате такого преобразования каждой точки фигуры F получена фигура F1 то говорят, что фигура F гомотетична фигуре F1.
(рис. 61). Точку О называют центром гомотетии, а число коэффициентом гомотетии. Если в результате такого преобразования каждой точки фигуры F получена фигура F1 то говорят, что фигура F гомотетична фигуре F1.
Вы видите, что определение гомотетии в пространстве аналогично соответствующему определению на плоскости. Следовательно, все свойства и их доказательства аналогичны. Поэтому, мы не будем доказывать их и рекомендуем провести их самостоятельно.
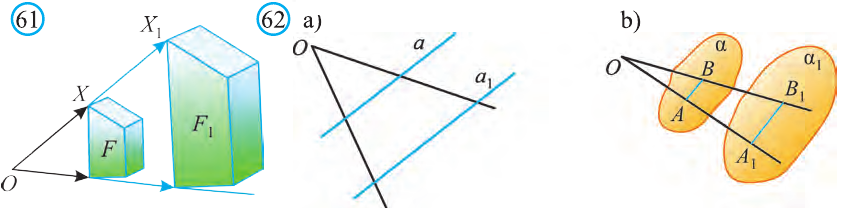
Гомотетия относительно точки О с коэффициентом является преобразованием подобия. Гомотетия с отличным от нуля коэффициентом при = 1 отображает фигуру F в себя, а при =-1 в фигуру F1 симметричную фигуре F относительно точки О. В остальных случаях гомотетии не сохраняет расстояния между точками, т. е. не является движением. В результате гомотетии расстояние между точками увеличивается в одно и тоже число раз, т. е. меняются измерения фигуры, но сохраняется её форма. При гомотетии а) прямая отображается в параллельную ей прямую (рис. 62.а); b) плоскость — в параллельную ей плоскость (рис. 62.b), если они не проходят через центр гомотетии.
Если же прямая или плоскость проходят через центр гомотетии, то они отображаются в себя.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Иррациональные числа
- Действительные числа
- Решение уравнений высших степеней
- Системы неравенств
- Уравнения и неравенства
- Уравнения и неравенства содержащие знак модуля
- Уравнение
- Метод математической индукции
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Нормальный вектор плоскости, координаты нормального вектора плоскости
Существует ряд заданий, которым для решения необходимо нормальный вектор на плоскости, чем саму плоскость. Поэтому в этой статье получим ответ на вопрос определения нормального вектора с примерами и наглядными рисунками. Определим векторы трехмерного пространства и плоскости по уравнениям.
Нормальный вектор плоскости – определение, примеры, иллюстрации
Чтобы материал легко усваивался, необходимо предварительно изучить теорию о прямой в пространстве и представление ее на плоскости и векторы.
Нормальным вектором плоскости считается любой ненулевой вектор, который лежит на перпендикулярной к данной плоскости прямой.
Отсюда следует, что имеет место существование большого количества нормальных векторов в данной плоскости. Рассмотрим на рисунке, приведенном ниже.
Нормальные векторы располагаются на параллельных прямых, поэтому они все коллинеарны. То есть, при нормальном векторе n → , расположенном в плоскости γ , вектор t · n → , имея ненулевое значение параметра t , также нормальный вектор плоскости γ . Любой вектор может быть рассмотрен как направляющий вектор прямой, которая перпендикулярна этой плоскости.
Имеются случаи совпадения нормальных векторов плоскостей из-за перпендикулярности одной из параллельных плоскостей, так как прямая перпендикулярна и второй плоскости. Отсюда следует, что нормальные векторы перпендикулярных плоскостей должны быть перпендикулярными.
Рассмотрим на примере нормального вектора на плоскости.
Задана прямоугольная система координат О х у z в трехмерном пространстве. Координатные векторы i → , j → , k → считаются нормальными векторами плоскостей O y z , O x z и O x y . Это суждение верно, так как i → , j → , k → ненулевые и расположены на координатных прямых O x , O y и O z . Эти прямые перпендикулярны координатным плоскостям O y z , O x z и O x y .
Координаты нормального вектора плоскости – нахождение координат нормального вектора плоскости из уравнения плоскости
Статья предназначена для того, чтобы научить находить координаты нормального вектора плоскости при известном уравнении плоскости прямоугольной системы координат О х у z . Для определения нормального вектора n → = ( A , B , C ) в плоскости необходимо наличие общего уравнения плоскости, имеющее вид A x + B y + C z + D = 0 . То есть достаточно иметь уравнение плоскости, тогда появится возможность для нахождения координат нормального вектора.
Найти координаты нормального вектора, принадлежащего плоскости 2 x — 3 y + 7 z — 11 = 0 .
По условию имеем уравнение плоскости. Необходимо обратить внимание на коэффициенты, так как они и являются координатами нормального вектора заданной плоскости. Отсюда получаем, что n → = ( 2 , — 3 , 7 ) — это нормальный вектор плоскости. Все векторы плоскости задаются при помощи формулы t · n → = 2 · t , — 3 · t , 7 · t , t является любым действительным числом не равным нулю.
Ответ: n → = ( 2 , — 3 , 7 ) .
Определить координаты направляющих векторов заданной плоскости x + 2 z — 7 = 0 .
По условию имеем, что дано неполное уравнение плоскости. Чтобы увидеть координаты, необходимо преобразовать уравнение x + 2 z — 7 = 0 к виду 1 · x + 0 · y + 2 z — 7 = 0 . Отсюда получим, что координаты нормального вектора данной плоскости равны ( 1 , 0 , 2 ) . Тогда множество векторов будет иметь такую форму записи ( t , 0 , 2 · t ) , t ∈ R , t ≠ 0 .
Ответ: ( t , 0 , 2 · t ) , t ∈ R , t ≠ 0 .
При помощи уравнения плоскости в отрезках, имеющего вид x a + y b + z c = 1 , и общего уравнения плоскости возможна запись нормального вектора этой плоскости, где координаты равны 1 a , 1 b , 1 c .
Знания о нормальном векторе позволяют с легкостью решать задачи. Часто встречающимися задачами являются задания с доказательствами параллельности или перпендикулярности плоскостей. Заметно упрощается решение задач на составление уравнений заданной плоскости. Если имеется вопрос о нахождении угла между плоскостями или между прямой и плоскостью, то формулы нормального вектора и нахождения его координат помогут в этом.
Общее уравнение плоскости
В данной статье мы рассмотрим общее уравнение плоскости в пространстве. Определим понятия полного и неполного уравнения плоскости. Для построения общего уравнения плоскости пользуйтесь калькулятором уравнение плоскости онлайн.
Пусть задана произвольная декартова прямоугольная система координат Oxyz. Общим уравнением плоскости называется линейное уравнение вида:
| Ax+By+Cz+D=0, | (1) |
где A, B, C, D − некоторые постоянные, причем хотя бы один из элементов A , B и C отлично от нуля.
Мы покажем, что линейное уравнение (1) в пространстве определяет плоскость и любой плоскость в пространстве можно представить линейным уравнением (1). Докажем следующую теорему.
Теорема 1. В произвольной декартовой прямоугольной системе координат в пространстве каждая плоскость α может быть задана линейным уравнением (1). Обратно, каждое линейное уравнение (1) в произвольной декартовой прямоугольной системе координат в пространстве определяет плоскость.
Доказательство. Достаточно доказать, что плоскость α определяется линейным уравнением при какой нибудь одной декартовой прямоугольной системе координат, поскольку тогда она будет определяться линейным уравнением и при любом выборе декартовой прямоугольной системы координат.
Пусть в пространстве задана плоскость α. Выберем оси Ox и Oy так, чтобы они располагались на плоскости α, а ось Oz направим перпендикулярно к этой плоскости. Тогда линейное уравнение z=0 будет уравнением плоскости, т.к. координаты любой точки, принадлежащей этой плоскости удовлетворяют уравнению z=0, а координаты любой точки, не лежащей на этой плоскости − нет. Первая часть теоремы доказана.
Пусть фиксирована произвольная декартова прямоугольная система координат Oxyz. Рассмотрим линейное уравнение (1), где хотя бы один из элементов A , B и C отлично от нуля. Тогда уравнение (1) имеет хотя бы одно решение x0, y0, z0. Действительно. Пусть из коэффициентов A≠0. Возьмем произвольные числа y0, z0. Тогда
 . . |
Таким образом, существует точка M0(x0, y0, z0), координаты которой удовлетворяют уравнению (1):
| Ax0+By0+Cz0+D=0. | (2) |
Вычитая из уравнения (1) тождество (2), получим
| A(x−x0)+B(y−y0)+С(z−z0)=0, | (3) |
которая эквивалентна уравнению (1).
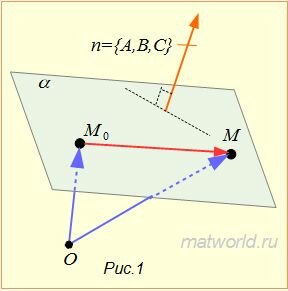 |
Покажем, что (3) определяет некоторую плоскость, проходящую через точку M0(x0, y0, z0) и перпендикулярную вектору n=<A,B,C> (n≠0, так как хотя бы один из чисел A,B,C отлично от нуля).
Если точка M0(x0, y0, z0) принадлежит плоскости α, то ее координаты удовлетворяют уравнению (3), т.к. векторы n=<A,B,C> и  перпендикулярны (Рис.1) и их скалярное произведение равно нулю:
перпендикулярны (Рис.1) и их скалярное произведение равно нулю:
  . . |
Если же точка M(x, y, z) не лежит на плоскости α, то векторы n=<A,B,C> и не ортогональны. Тогда их скалярное произведение не равно нулю, т.е. координаты точки M(x, y, z) не удовлетворяют условию (3). Теорема доказана.
Одновременно с доказательством теоремы 1 мы получили следующее утверждение.
Утверждение 1. В декартовой прямоугольной системе координат вектор с компонентами (A,B,C) перпендикулярен плоскости Ax+By+Cz+D=0.
Вектор n=(A,B,C) называется нормальным вектором плоскости , определяемой линейным уравнением (1).
Утверждение 2. Если два общих уравнения плоскости
| A1x+B1y+C1z+D=0 | (4) |
| A2x+B2y+C2z+D=0 | (5) |
определяют одну и ту же плоскость, то найдется такое число λ, что выпонены равенства
| A2=A1λ, B2=B1λ, C2=C1λ, D2=D1λ. | (6) |
| A1x0+B1y0+C1z0+D=0 | (7) |
| A2x0+B2y0+C2z0+D=0 | (8) |
Умножая уравнение (7) на λ и вычитая из него уравнение (8) получим:
| (A1λ−A2)x0+(B1λ−B2)y0+(C1λ−C2)z0+(D1λ−D2)=0. |
Так как выполнены первые три равенства из выражений (6), то D1λ−D2=0. Т.е. D2=D1λ. Утверждение доказано.
Неполные уравнения плоскости
Определение 1. Общее уравнение плоскости (1) называется полным , если все коэффициенты A, B, C, D отличны от нуля. Если же хотя бы один из коэффициентов A, B, C, D равен нулю, то общее уравнение плоскости называется неполным .
Рассмотрим все возможные варианты неполных уравнений плоскости:
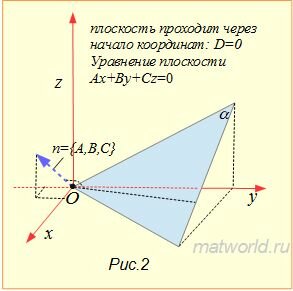
При D=0, имеем уравнение плоскости Ax+By+Cz=0, проходящей через начало координат (Рис.2). Действительно, точка O(0,0,0) удовлетворяет этой системы линейных уравнений.
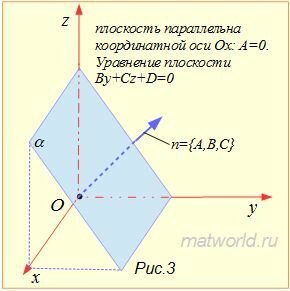
При A=0, имеем уравнение плоскости By+Cz+D=0, которая параллельна оси Ox (Рис.3). В этом случае нормальный вектор плоскости n=<0,B,C> лежит на координатной плоскости Oyz.
  |
При B=0, имеем уравнение плоскости Ax+Cz+D=0, которая параллельна оси Oy (Рис.4).
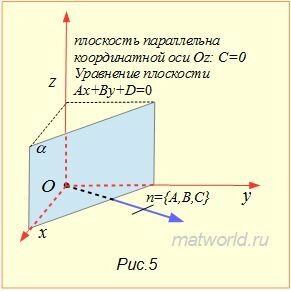
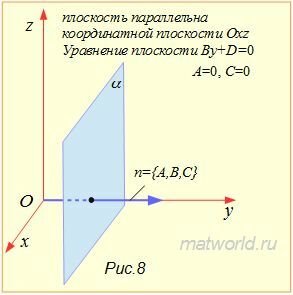
При C=0, имеем уравнение плоскости Ax+By+D=0, которая параллельна оси Oz (Рис.5).
  |
При A=0,B=0 имеем уравнение плоскости Cz+D=0, которая параллельна координатной плоскости Oxy (Рис.6).
При B=0,C=0 имеем уравнение плоскости Ax+D=0, которая параллельна координатной плоскости Oyz (Рис.7).
  |
При A=0,C=0 имеем уравнение плоскости By+D=0, которая параллельна координатной плоскости Oxz (Рис.8).
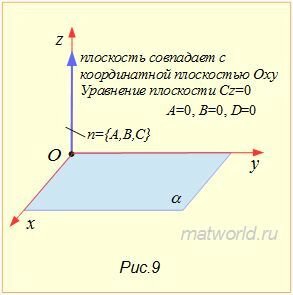
При A=0,B=0,D=0 имеем уравнение плоскости Cz=0, которая совпадает с координатной плоскостью Oxy (Рис.9).
  |
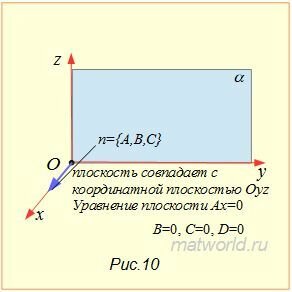
При B=0,C=0,D=0 имеем уравнение плоскости Ax=0, которая совпадает с координатной плоскостью Oyz (Рис.10).
При A=0,C=0,D=0 имеем уравнение плоскости By=0, которая совпадает с координатной плоскостью Oxz (Рис.11).
  |
Рассмотрим примеры построения общего уравнения плоскости.
Пример 1. Построить общее уравнение плоскости, проходящей через точку M(4,−1,2) параллельной координатной плоскости Oxy.
Решение. Общее уравнение плоскости, проходящей через некоторую точку M(x0,y0,z0) имеет вид (3). Подставляя координаты точки M в (3), получим:
| A(x−4)+B(y−(−1))+C(z−2)=0 | (9) |
Так как плоскость параллельна координатной плоскости Oxy, то направляющий вектор имеет следующий вид n=<A,B,C>=, т.е. A=0, B=0, C=1.
Подставляя коэффициенты A,B,C в (9), получим:
| 0(x−4)+0(y−(−1))+1(z−2)=0 | (9) |
Пример 2. Построить общее уравнение плоскости, проходящей через начало координат и имеющий нормальный вектор n==.
Решение. Начало координат имеет коэффициенты (0,0,0). Общее уравнение плоскости, проходящей через некоторую точку M(x0,y0,z0) имеет вид (3). Подставляя коэффициенты начальной точки в (3), получим:
| A(x−0)+B(y−0)+C(z−0)=0 | (10) |
Так как плоскость имеет нормальный вектор n=<A,B,C>=, т.е. A=2, B=3, C=1, подставляя коэффициенты A,B,C в (10), получим:
| 2(x−0)+3(y−0)+1(z−0)=0 | (9) |
Онлайн калькулятор для построения общего уравнения плоскости находится здесь. Там же вы найдете примеры построения общего уравнения плоскости, если известны три точки этой плоскости или если известна одна точка и нормальный вектор этой плоскости.