| Классы МПК: | G01S5/12 путем индикации в одной системе координат пеленгов различной формы, например гиперболической, круговой, эллиптической, радиальной | |||||||||||||||||||||||||||||||||||||||||||
| Автор(ы): | Ислентьев Евгений Владимирович (RU) , Гречкосеев Александр Кузьмич (RU) , Кокорин Владимир Иванович (RU) | |||||||||||||||||||||||||||||||||||||||||||
| Патентообладатель(и): | ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ УНИТАРНОЕ ПРЕДПРИЯТИЕ «Научно-производственное объединение прикладной механики им. академика М.Ф. Решетнева» (RU) | |||||||||||||||||||||||||||||||||||||||||||
| Приоритеты: |








 1. M,
1. M,

 — априорный вектор состояния космического аппарата-потребителя на момент времени t k до начала обработки всех измерений на момент времени t k ;
— априорный вектор состояния космического аппарата-потребителя на момент времени t k до начала обработки всех измерений на момент времени t k ; — матрица частных производных от функции модели измерения по вектору состояния космического аппарата-потребителя на момент времени t k после обработки (i-1) измерения;
— матрица частных производных от функции модели измерения по вектору состояния космического аппарата-потребителя на момент времени t k после обработки (i-1) измерения; — апостериорный вектор состояния космического аппарата-потребителя на момент времени t k после обработки i измерений;
— апостериорный вектор состояния космического аппарата-потребителя на момент времени t k после обработки i измерений; — априорный вектор состояния космического аппарата-потребителя на момент времени t k после обработки (i-1) измерения;
— априорный вектор состояния космического аппарата-потребителя на момент времени t k после обработки (i-1) измерения; — функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя
— функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя 
 — апостериорный вектор состояния космического аппарата-потребителя на момент времени t k после обработки М измерений;
— апостериорный вектор состояния космического аппарата-потребителя на момент времени t k после обработки М измерений;






















 — матрица частных производных от вектора состояния КА-потребителя на момент времени tk по вектору состояния КА-потребителя qk-1k-1 на момент времени tk-1;
— матрица частных производных от вектора состояния КА-потребителя на момент времени tk по вектору состояния КА-потребителя qk-1k-1 на момент времени tk-1; — априорный вектор состояния КА-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
— априорный вектор состояния КА-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk; — апостериорный вектор состояния КА-потребителя на момент времени tk после обработки (i-1) измерения;
— апостериорный вектор состояния КА-потребителя на момент времени tk после обработки (i-1) измерения; — апостериорный вектор состояния КА-потребителя на момент времени tk после обработки i измерений;
— апостериорный вектор состояния КА-потребителя на момент времени tk после обработки i измерений; — матрица частных производных от функции модели измерения по вектору состояния КА-потребителя;
— матрица частных производных от функции модели измерения по вектору состояния КА-потребителя; — функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного апостериорного вектора состояния КА-потребителя
— функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного апостериорного вектора состояния КА-потребителя 










 где N — количество НКА рабочего созвездия с числом не менее двух. Следовательно, формируемый вектор измеряемых параметров будет иметь размерность, которая будет изменяться между моментами времени. Например, количество радиовидимых навигационных космических аппаратов ГЛОНАСС может достигать 8, а количество навигационных космических аппаратов GPS 12, поэтому сформированный вектор разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух будет иметь размерность от 1 до 190.
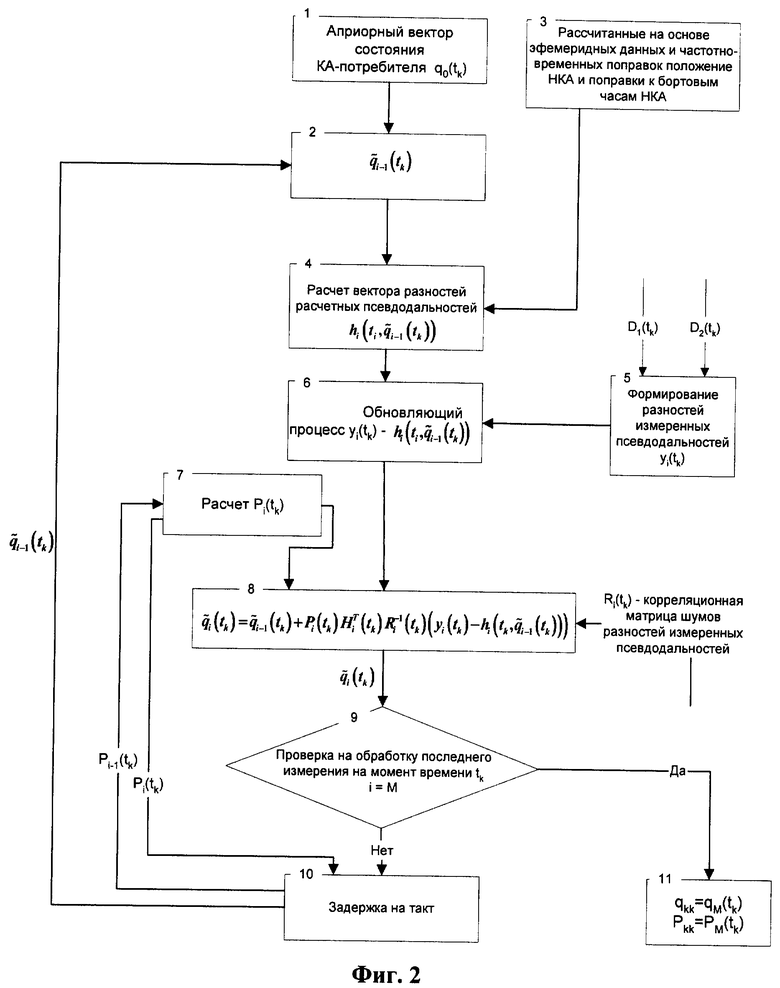
где N — количество НКА рабочего созвездия с числом не менее двух. Следовательно, формируемый вектор измеряемых параметров будет иметь размерность, которая будет изменяться между моментами времени. Например, количество радиовидимых навигационных космических аппаратов ГЛОНАСС может достигать 8, а количество навигационных космических аппаратов GPS 12, поэтому сформированный вектор разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух будет иметь размерность от 1 до 190. полученной после обработки (i-1) измерений, производится расчет априорного вектора состояния КА-потребителя на i-й шаг (оператор 2). Из массива рассчитанных на основании эфемеридных данных и частотно-временных поправок, принятых в составе навигационного сообщения НКА, векторов состояния НКА и поправок к бортовым часам НКА выбираются вектора состояния, соответствующие обрабатываемым измерениям псевдодальности между КА-потребителем и НКА рабочего созвездия с числом не менее двух (оператор 3). На основании априорного вектора состояния КА-потребителя
полученной после обработки (i-1) измерений, производится расчет априорного вектора состояния КА-потребителя на i-й шаг (оператор 2). Из массива рассчитанных на основании эфемеридных данных и частотно-временных поправок, принятых в составе навигационного сообщения НКА, векторов состояния НКА и поправок к бортовым часам НКА выбираются вектора состояния, соответствующие обрабатываемым измерениям псевдодальности между КА-потребителем и НКА рабочего созвездия с числом не менее двух (оператор 3). На основании априорного вектора состояния КА-потребителя  векторов состояния НКА и поправок к бортовым часам НКА производится вычисление разности расчетных псевдодальностей
векторов состояния НКА и поправок к бортовым часам НКА производится вычисление разности расчетных псевдодальностей  между КА-потребителем и НКА (оператор 4). По полученным измеренным псевдодальностям между КА-потребителем и НКА формируется разность измеренных псевдодальностей yi(tk) (оператор 5). По полученным разностям расчетных и измеренных псевдодальностей формируется обновляющий процесс — разность разностей расчетных и разностей измеренных псевдодальностей (оператор 6). По полученной на предыдущем шаге ковариационной матрице Pi-1(tk) априорного вектора состояния КА-потребителя рассчитывается ковариационная матрица Pi(tk) на текущий шаг обработки измерений (оператор 7). По рассчитанной ковариационной матрице Рi(tk) и по полученному обновляющему процессу и по ковариационной матрице Ri(tk) шумов разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух производят расчет апостериорного вектора состояния КА-потребителя
между КА-потребителем и НКА (оператор 4). По полученным измеренным псевдодальностям между КА-потребителем и НКА формируется разность измеренных псевдодальностей yi(tk) (оператор 5). По полученным разностям расчетных и измеренных псевдодальностей формируется обновляющий процесс — разность разностей расчетных и разностей измеренных псевдодальностей (оператор 6). По полученной на предыдущем шаге ковариационной матрице Pi-1(tk) априорного вектора состояния КА-потребителя рассчитывается ковариационная матрица Pi(tk) на текущий шаг обработки измерений (оператор 7). По рассчитанной ковариационной матрице Рi(tk) и по полученному обновляющему процессу и по ковариационной матрице Ri(tk) шумов разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух производят расчет апостериорного вектора состояния КА-потребителя  после обработки i измерений на момент времени tk (оператор 8). Проверяется условие обработки последнего измерения на данный момент времени (оператор 9). Если условие не выполнено, то полученные апостериорный вектор состояния КА-потребителя и ковариационная матрица апостериорного вектора состояния КА-потребителя выступают в качестве априорного вектора состояния космического аппарата-потребителя и в качестве априорной ковариационной матрицы вектора состояния космического аппарата-потребителя при обработке следующей пары измерений псевдодальности между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух (оператор 10). В противном случае полученный апостериорный вектор состояния космического аппарата-потребителя
после обработки i измерений на момент времени tk (оператор 8). Проверяется условие обработки последнего измерения на данный момент времени (оператор 9). Если условие не выполнено, то полученные апостериорный вектор состояния КА-потребителя и ковариационная матрица апостериорного вектора состояния КА-потребителя выступают в качестве априорного вектора состояния космического аппарата-потребителя и в качестве априорной ковариационной матрицы вектора состояния космического аппарата-потребителя при обработке следующей пары измерений псевдодальности между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух (оператор 10). В противном случае полученный апостериорный вектор состояния космического аппарата-потребителя  и ковариационная матрица РM(tk) выступают в качестве исходных данных для дальнейшего расчета априорного вектора состояния космического аппарата-потребителя на следующий момент времени tk+1 (оператор 11).
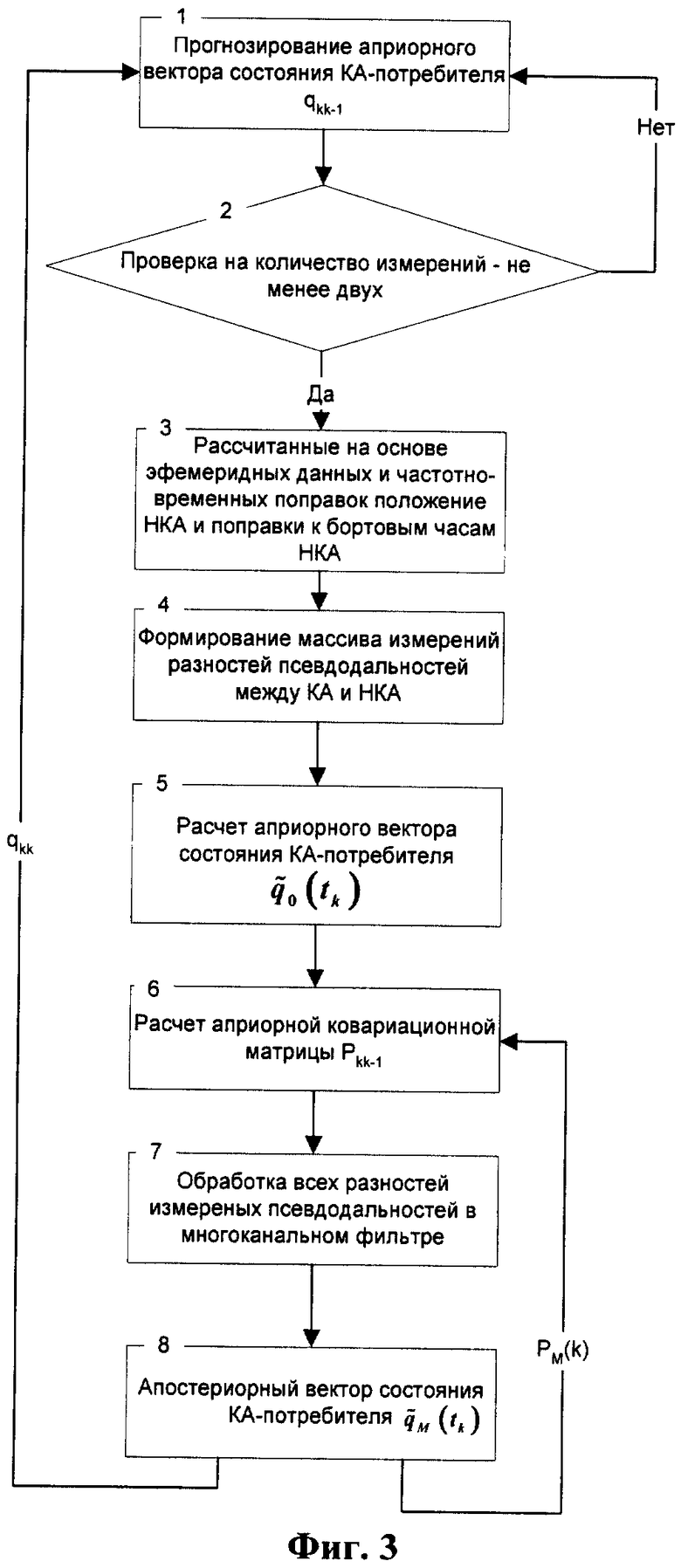
и ковариационная матрица РM(tk) выступают в качестве исходных данных для дальнейшего расчета априорного вектора состояния космического аппарата-потребителя на следующий момент времени tk+1 (оператор 11). на момент времени tk (оператор 5). Производится расчет априорной ковариационной матрицы P0(tk) априорного вектора состояния КА-потребителя
на момент времени tk (оператор 5). Производится расчет априорной ковариационной матрицы P0(tk) априорного вектора состояния КА-потребителя  (оператор 6). Сформированный массив разностей измеренных псевдодальностей обрабатывается в многоканальном последовательном фильтре Калмана (оператор 7). Полученные после обработки всех разностей измеренных псевдодальностей апостериорный вектор состояния КА-потребителя
(оператор 6). Сформированный массив разностей измеренных псевдодальностей обрабатывается в многоканальном последовательном фильтре Калмана (оператор 7). Полученные после обработки всех разностей измеренных псевдодальностей апостериорный вектор состояния КА-потребителя  и апостериорная ковариационная матрица вектора состояния КА-потребителя
и апостериорная ковариационная матрица вектора состояния КА-потребителя  используются в дальнейшем для расчета априорного вектора состояния КА-потребителя и априорной ковариационной матрицы на следующие моменты времени (оператор 8).
используются в дальнейшем для расчета априорного вектора состояния КА-потребителя и априорной ковариационной матрицы на следующие моменты времени (оператор 8).| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛОСТНОСТИ ВЫСОКОТОЧНЫХ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПОТРЕБИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
| RU2577846C1 |
| Способ определения целостности высокоточных навигационных определений в реальном времени | 2017 |
| RU2644450C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ ПОМОЩИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ КОСМИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
| RU2070315C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
| RU2537818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
| RU2402786C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПОДВИЖНОГО ОБЪЕКТА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ КОСМИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1996 |
| RU2095757C1 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2002 |
| RU2208809C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
| RU2314553C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
| RU2754396C1 |
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА ПРИ ДВИЖЕНИИ ВНЕ АТМОСФЕРЫ | 1993 |
| RU2062989C1 |
Иллюстрации к изобретению RU 2 325 667 C1
Реферат патента 2008 года СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ КОСМИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ
Изобретение относится к спутниковой навигации и может быть использовано для повышения точности определения вектора состояния космических аппаратов. Сущность заявленного способа состоит в том, что измерения псевдодальностей проводятся между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух, при этом в моменты отсутствия данных измерений производится прогнозирование вектора состояния космического аппарата-потребителя на основании последней полученной оценки положения, а в моменты наличия измерений для определения положения космического аппарата используется многоканальный последовательный фильтр Калмана для нелинейных моделей движения и измерения, позволяющий определять положение космического аппарата-потребителя по измерениям псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух. Достигаемым техническим результатом является повышение точности, при одновременном упрощении, определения вектора состояния космического аппарата-потребителя. 3 ил.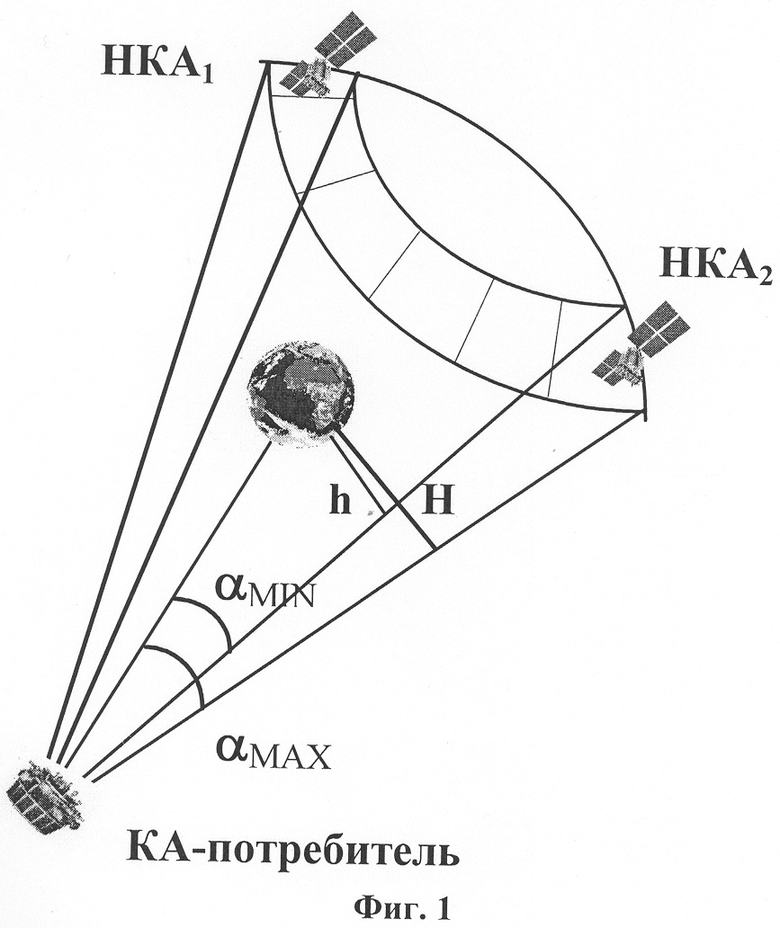
Формула изобретения RU 2 325 667 C1
Способ определения вектора состояния космического аппарата по сигналам космических навигационных систем, заключающийся в измерении с привязкой по времени на космическом аппарате псевдодальностей по радионавигационным сигналам навигационных космических аппаратов, образующим рабочее созвездие, и формировании разностей псевдодальностей между космическим аппаратом и навигационными космическими аппаратами, отличающийся тем, что измерения псевдодальностей проводят между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух, при этом в моменты отсутствия данных измерений производят прогнозирование вектора состояния космического аппарата на основании последнего полученного апостериорного вектора состояния, а в моменты наличия измерений для определения вектора состояния космического аппарата используют многоканальный последовательный фильтр Калмана для нелинейных моделей движения и измерения, позволяющий определять вектор состояния космического аппарата по измерениям псевдодальностей между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух по формулам




где  — априорный вектор состояния космического аппарата-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
— априорный вектор состояния космического аппарата-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
qkk-1 — прогноз вектора состояния космического аппарата-потребителя на момент времени tk после обработки всех измерений на моменты времени t0, . tk-1;
P0(tk) — априорная ковариационная матрица априорного вектора состояния системы на момент времени tk;
Pkk-1 — прогноз ковариационной матрицы апостериорного вектора состояния
КА-потребителя на момент времени tk после обработки всех измерений на моменты времени t0, . tk-1;
Pi(tk) — ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
Pi-1(tk) — прогноз ковариационной матрицы априорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
 — матрица частных производных от функции модели измерения по вектору состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
— матрица частных производных от функции модели измерения по вектору состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
Ri(tk) — ковариационная матрица шума i-й разности измеренных псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух на момент времени tk;
 — апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
— апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
 — априорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
— априорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
уi(tk), i∈1. M — разности измеренных псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух на момент времени tk;
 — функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя
— функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя 
Pi(tk), i∈1. M — ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
М — общее количество измерений разности псевдодальностей на момент времени tk;
qkk — апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки всех М измерений;
 — апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки М измерений;
— апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки М измерений;
Pkk — ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки всех М измерений;
РM(tk) — ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки М измерений.
Обзор состояния и развития спутников юстировочно-калибровочного класса

Обзор состояния и развития спутников юстировочно-калибровочного класса
Обзор содержит обобщенное и систематизированное изложение взглядов на роль и место спутников юстировочно-калибровочного класса с учетом их оснащения специальной бортовой аппаратурой, обеспечивающей решение задач испытаний и контроля функционирования средств и систем РКО, а также возможности их использования в научных целях.
Обзор разработан с использованием информации о ранее создаваемых в СССР и США спутниках этого типа.
1. Состояние и уровень развития юстировочных и калибровочных космических аппаратов, созданных в СССР
1.1. Роль и назначение КА юстировочно-калибровочного класса
Современные системы вооружения Войск РКО системы ПРН, ПРО, ПКО, ККП) представляют собой совокупности взаимодействующих комплексов радиотехнических, вычислительных и огневых средств.
Подобные системы характеризуются:
· возможностью работы в сложных условиях целевой обстановки, включая одиночные и многоэлементные цели, мало — и крупноразмерные сгустки неразрешенных элементов;
· высокими тактико-техническими характеристиками, в том числе по рубежам обнаружения, точностям измерения координат и ЭПР, разрешающей способности, требующих оценки и контроля в условиях натурного эксперимента;
· необходимостью высокого уровня метрологического обеспечения (точности эталона и оперативности) на этапах отработки и испытаний;
· расположением cредств практически на всей территории РФ и СНГ и связанной с этим сложностью формирования целевой обстановки;
- высокой степенью автоматизации процессов обработки и информационного взаимодействия средств системы.
Отработка, испытания и эксплуатация таких систем вооружения представляет собой и весьма сложную проблему. Сложность этой проблемы обусловлена многообразием решаемых задач и большим объемом испытательных работ, включающих испытания отдельных средств и системы в целом.
В процессе испытаний осуществляются юстировка измерительных средств, калибровка моделей, проверки тактико-технических характеристик радиотехнических и других средств системы, отрабатывается и проверяется работа боевых программ и комплексное функционирование всей системы в целом.
В процессе боевой эксплуатации осуществляется достоверный контроль правильности функционирования элементов системы, оцениваются допуски в изменении тактико-технических параметров и характеристик средств, производится их периодическая настройка и калибровка по реальным целям.
Успешное проведение испытаний таких сложных систем вооружения, поддержание их параметров и характеристик на нужном уровне в процессе эксплуатации находится в прямой зависимости от правильной и четко организованной системы обеспечения испытаний и поддержания в боевой готовности средств Войск РКО.
Анализ возможных структур и средств системы обеспечения испытаний показал, что эффективное решение указанных задач в натурных условиях на местах боевой дислокации при использовании традиционных средств обеспечения испытаний оказалось практически невозможным. Объясняется это следующим. Пуски БР-мишеней на местах дислокации средств практически невозможны. Самолеты, попутные ИСЗ, наземные средства не обеспечивают формирование заданных видов целевой обстановки, включая одно — и многоэлементные цели, мало — и крупноразмерные сгустки неразрешенных элементов, модели радиолинии управления перехватчиками в районах боевой дислокации средств ПРО, ПРН, ПКО, ККП, то есть, практически, над всей территорией России и стран СНГ. Кроме того, метрологические возможности этих средств, включая отражательные характеристики и точности эталонных траекторных данных, не соответствуют высоким тактико-техническим характеристикам локационных средств и систем ПРО, ПКО, ПРН, ККП.
С точки зрения отражающих свойств все радиолокационные цели принято делить на элементарные и сложные. К элементарным целям относятся отражающие объекты геометрически правильной формы, эффективная отражающая поверхность которых может быть определена аналитическим путем (например, уголковые отражатели, шар, вибратор). Подавляющее большинство реальных радиолокационных целей, представляющих собой отражающие объекты сложной конфигурации, относятся к сложным целям. Их эффективная отражающая поверхность может быть определена только экспериментально. Любую сложную цель можно рассматривать как совокупность определенным образом расположенных элементарных отражателей, а отраженных от сложной цели сигнал — как алгебраическую сумму сигналов, рассеянных элементарными отражателями. В процессе движения цели непрерывно изменяется положение отражателей относительно РЛС (а иногда и относительно друг друга), что приводит к изменению амплитудных и фазовых соотношений слагаемых сигналов и в конечном счете к возникновению флюктуаций результирующего сигнала.
Амплитудные флюктуации отраженных сигналов уменьшают точность определения координат целей и являются одним из основных источников случайных ошибок при автоматическом сопровождении целей.
При отражении радиолокационного сигнала от сложной цели возникают не только амплитудные флюктуации, но и флюктуации его фазового фронта. Так как сложная цель не может быть представлена точечным изотропным излучателем, то фазовый фронт отраженного от нее сигнала представляет собой искаженную сферическую поверхность.
В процессе движения цели изменяются как ориентация этой поверхности относительно РЛС, так и сам характер ее искажения по сравнению со сферой, что обуславливает появление флюктуаций фазового фронта отраженных от данной цели сигналов. При флюктуациях фазового фронта отраженных от сложной цели сигналов объектом измерения угловых координат оказывается не сама цель, а точка — эффективный центр отражения цели «блуждающая» в некотором объеме. При определенных условиях (сильных искажениях фазового фронта) эффективный центр отражения цели пространственно может оказаться вне цели и флюктуации фазового фронта отраженных сигналов будут являться основной причиной больших ошибок пеленгации цели.
Факторами, влияющими на точность измерения параметров сигнала цели, являются: отношение энергии принимаемого сигнала к энергии шумов, форма зондирующего сигнала, степень совершенства выполнения отдельных узлов радиотехнического измерительного устройства ,условия распространения радиоволн.
В связи с вышеизложенным при испытаниях и контроле функционирования РЛС с заданными на нее требованиями по точностным характеристикам (параметрам) целесообразно использование (в качестве эталонной цели) юстировочных и калибровочных ИСЗ (оснащенных аппаратурой высокоточного определения своего местоположения на орбите и точно известными значениями ЭПР). В начале 60-х годов в СССР совместными усилиями организаций МО и промышленности была начата разработка принципиально нового вида средств обеспечения натурных работ: cпециальных КА обеспечения отработки, испытаний и эксплуатации создававшихся в то время средств и систем РКО.
Первым таким аппаратом — был КА ДСП-Ю РКК «Радуга».
C применением этого аппарата была обеспечена эффективная отработка, испытания и ввод в строй ряда полигонных средств РКО.
Одновременно в процессе эксплуатации этих КА разрабатывались и отрабатывались на практике элементы методологии применения КА данного вида по целевому назначению.
По своим весо-габаритным и орбитальным характеристикам, составу бортовой аппаратуры и решаемым задачам, рассматриваемые в данном обзоре спутники относятся к малым исследовательским ИСЗ юстировочно-калибровочного класса.
Малые КА обеспечивали юстировку, калибровку и контроль точностных характеристик РЛС, используемых в системах ККП, ПРН и ПРО г. Москвы, а также позволяли определять динамические параметры верхних слоев атмосферы в зависимости от времени года, суток и состояния солнечной активности, влияющих на точность движения космических объектов.
Первые запуски спутников этого типа осуществлены в СССР в 1964 году («Космос-31», «Космос-36»).
На рубеже 60-70-х годов ввод в строй ряда принципиально новых средств ПРО, ПРН, ККП, потребовал создание адекватных средств обеспечения их испытаний.
Для решения проблемы обеспечения отработки, испытаний и поддержания в состоянии БГ наземных локационных средств систем ПРН, ПРО, ПКО, ККП Войск РКО была задана разработка ракетно-космического комплекса (РКК) «Тайфун» и создание для этих целей специальных спутников.
Министерством Обороны СССР были утверждены тактико-технические требования на создание космических аппаратов «Тайфун» трех классов:
юстировочных — для метрологического контроля функционирования и определения точностных характеристик РЛС; калибровочных — для высокоточных измерений энергетического потенциала, калибровки каналов и оценки разрешающей способности станций, а также получения данных для уточнения параметров верхней атмосферы в интересах решения прикладных баллистических задач; многоэлементных — для имитации сложных баллистических целей в реальных боевых порядках.
1.2. Облик и характеристика КА юстировочно-калибровочного класса
Типы космических аппаратов юстировочно — калибровочного класса, создаваемых и используемых в СССР в различные периоды времени, приведены на рисунке 1.
Юстировочные КА (ЮКА)
Калибровочные КА (ККА)
Многоэлементные КА (МКА)
КА сферической формы, имеющие на борту:
· аппаратуру высокоточных траекторных измерений радиотехническими и оптическими (лазерными) системами;
- приемопередатчики; служебную и научную аппаратуру.
КА сферической формы с эталонной отражающей поверхностью.
Малоразмерные эталонные отражатели различных конфигураций, отстреливаемые с много элементных КА (сферы, конуса, цилиндры, уголковые отражатели, гантели).
КА сложной формы, имеющие на борту:
- аппаратуру высокоточных траекторных измерений радиотехническими, оптическими средствами и астрометрическими методами; набор малоразмерных эталонных отражателей различных конфигураций; систему отстрела отражателей; научную и служебную аппаратуру.
- юстировку РЛС; оценку точностных характеристик РЛС по малоразмерной (точечной) цели; паспортизацию средств внешнетраекторных измерений; контроль параметров атмосферы.
- калибровку РЛС; оценку энергетических характеристик РЛС; оценку структуры отраженных сигналов от ЭО различных конфигураций; контроль плотности атмосферы.
- проверку функционирования РЛС по многоэлементным группировкам КО; оценку разрешающей способности РЛС; проверку алгоритмов селекции на внеатмосферном участке; контроль точностных характеристик радиолокационных и оптических средств; исследование динамических параметров атмосферы.
Рис. 1. Юстировочные и калибровочные КА, создаваемые в СССР.
Юстировочный и калибровочный КА имеют сферическую форму. Запускаются ракетой-носителем С-1 «Космос» (SL-8) на орбиты, имеющие четыре различных наклонения: 50,7° — с космодрома Капустин Яр, 65, 8° , 74,0° и 83,0° — с космодрома Плесецк с перигеем 300 и 400 км и апогеем 1600-2000 км. Спутники этого типа предназначены для обеспечения испытаний, оценки точностных и энергетических характеристик РЛС систем ПРО, ПРН, ККП.
Многоэлементный КА конструктивно выполнен в виде цилиндра с размещенными вокруг него эталонными отражателями и панелями солнечных батарей. Запускается ракетой-носителем С-1 «Космос», а с 1988 г. — ракетой-носителем «Циклон». Запуски производятся с космодрома Плесецк на орбиты со средней высотой 530 км и наклонениями 74 и 88,5 градуса.
Многоэлементные КА обеспечивают формирование одиночных и групповых скоплений малоразмерных космических объектов в требуемой области околоземного пространства в интересах калибровки наземных РЛС и с учебной целью, а также для контроля параметров плотности верхних слоев атмосферы.
Аналогичные и похожие работы по использованию отделяемых со спутников фрагментов проводились и в зарубежных странах. Так, например, в 1988 г. во время проведения США в рамках программы СОИ демонстрационных экспериментов «Дельта-181» в интересах задач селекции и тестирования радарных установок со спутника «US Navy Calshpere» выбрасывались и формировались модели сложной баллистической цели.
Малые спутники могут использоваться не только при калибровке РЛС и контроле состояния атмосферы. Возможность установки на спутнике с последующим отстрелом отражателей различных конфигураций находит широкое применение в оптической локации, оптике, радиосвязи и телевидении. Известны, например, эксперименты по оптической локации Луны с использованием французских отражателей, установленных на советских «Луноходах», и японских отражателей, доставленных на Луну американскими астронавтами. Не менее известны современные системы многоканальной связи с использованием пассивных спутников-ретрансляторов.
Радиолокационные отражатели широко применяются в качестве навигационных знаков, маркеров, буев при управлении движением воздушного и морского транспорта, служат эталонами при градуировке и калибровке различных радиолокационных средств, являются средствами увеличения радиолокационной контрастности судов, метеорологических зондов и космических аппаратов, используемых в качестве мишеней, а также могут быть использованы в качестве буев и маркеров при категорировании и обозначении границ «космического мусора» на соответствующих трассах движения космических аппаратов и т. п.
Использование отражателей с эталонной поверхностью рассеяния лишь одна из многих областей их научного и практического применения. В связи с неуклонным расширением области и масштабов использования радиолокационных, радионавигационных и лазерных устройств будут совершенствоваться уже известные типы и создаваться новые конструкции отражателей. Наиболее распространенными, по-видимому, останутся уголковые отражатели, получат дальнейшее развитие лазерные отражатели.
Использование многоэлементных спутников, оснащенных отражателями разных конфигураций и назначения, позволяет эффективно их использовать в различных исследовательских и экспериментальных работах, проводимых в России и других странах.
Можно заключить, что с созданием и применением малых спутников практически была разработана и создана система космических и наземных средств с методологией их применения, представляющая собой единый метрологический инструмент испытаний и контроля характеристик для всех радиотехнических и локационных средств и систем различного назначения.
Нет сомнения в том, что дальнейшее развитие и совершенствование таких типов спутников весьма полезно и необходимо.
Для увеличения точности измерения траектории движения активных спутников применяется специальное бортовое и наземное оборудование, позволяющее определять расстояние до спутника с ошибкой не более 3-15 м. и радиальной скорости с погрешностью 0,1 м/сек. Такие траектории используются в качестве эталонных при юстировке и оценке точностных характеристик информационных средств.
Благодаря своим очевидным преимуществам юстировочные и калибровочные спутники могут использоваться не только по прямому назначению, но и в других областях научной деятельности по исследованию космического пространства.
1.3. Технические особенности и возможности использования КА
Научная и служебная аппаратура, устанавливаемая на КА, должна иметь малые вес и габариты, высокую надежность и потреблять небольшое количество электроэнергии, что обусловлено небольшими размерами и длительным временем существования юстировочных КА.
Аппаратура на КА должна размещаться с учетом максимальной совместимости различных приборов и обеспечивать возможность их совместной работы и регистрации измеряемых параметров.
Юстировочный КА «Вектор» конструктивно выполнен в виде сферы диаметром Д » 2007 мм, которая служит отражателем и одновременно является силовой конструкцией для размещения элементов солнечной батареи и антенн. Масса КА » 570 кг. Кроме служебной аппаратуры в состав бортовой аппаратуры КА «Вектор» входят приемоответчики РЛС и фазопеленгаторы для работы с наземными радиотехническими средствами внешнетраекторных измерений (ВТИ). Бортовая аппаратура ВТИ обеспечивает определение параметров орбит средствами наземного командно-измерительного комплекса с точностью 190-260 м по положению и параметров эталонных траекторий полигонными средствами ВТИ на мерном участке с точностью 20-25 м. Предусмотрено, что в состав бортовой аппаратуры КА «Вектор» также может входить научная аппаратура общей массой до 180-200 кг.
В одном из вариантов КА этого типа предусматривалась возможность установки на поверхности КА оптических уголковых отражателей. В диапазоне длин волн 3,2-180 см корпус КА представляет собой неоднородный отражатель. Величина среднего значения ЭПР КА зависит от угла локации и поляризации радиоволн РЛС.
Калибровочный КА «ЮГ» представляет собой радиолокационный отражатель сферической формы, преимуществами которого являются: всенаправленность вторичного излучения, независимость ЭПР от типа поляризации облучающего сигнала и возможность точного расчета ЭПР отражателя не только в коротковолновой области, но также в резонансной и длинноволновой областях. Высокая точность изготовления поверхности позволяет использовать КА «ЮГ» как отражатель с эталонным значением ЭПР.
Масса КА 750 кг. Внешний диаметр корпуса 2 м.
КА «ЮГ» является первым отечественным спутником юстировочно-калибровочного класса. Длительный опыт эксплуатации подтверждает высокую эффективность применения КА по целевому назначению. Наряду с эффективной оценкой энергетических характеристик, КА обеспечивает решение широкого круга научных и практических задач. К их числу относятся исследования стабильности потенциала РЛС в зависимости от режимов работы передающих устройств, качества настройки приемников, влияния антенных укрытий и метеоусловий, оценка ошибок измерения ЭОП РЛС, калибровка РЛС перед работой по сложным космическим объектам, определение баллистических коэффициентов КО, уточнение параметров верхней атмосферы, оценка возможностей РЛС по определению ориентации КО, сравнение результатов измерений характеристик других объектов, проведенных РЛС, разнесенными на большие расстояния и др.
Многоэлементный КА «Ромб» представляет собой стабилизированный многоцелевой КА с отделяемыми элементами. Оборудован служебной, специальной и научной бортовой аппаратурой. Масса КА «Ромб» около 1100 кг. КА этого типа оснащены пассивными эталонными сферическими отражателями (ЭСО) и системой отстрела отражателей небольшими группами во время полета. Предельное количество отделяемых ЭСО на КА, запускаемых в период с 1975 по 1988 гг., составляло 24 шт., а с 1988 г. — до 32 шт. Материал ЭСО — алюминий. Диаметр 0,3 м, масса 0,6 и 1,2 кг.
Система отстрела обеспечивает одновременный отстрел в любой момент времени от одной до 12 пар ЭСО с фиксированными значениями скорости от 0,3 до 12 м/с. В состав бортовой аппаратуры КА входит аппаратура внешнетраекторных измерений, обеспечивающая измерение траекторных параметров движения КА наземными измерительными средствами.
Предусмотрена возможность оборудования КА системой импульсной световой сигнализации и лазерными уголковыми отражателями для высокоточных траекторных измерений, а также установки научной аппаратуры массой 200 кг в интересах организаций, непосредственно связанных с разработкой и эксплуатацией информационных средств.
КА этого типа предназначены для формирования одиночных и групповых скоплений малоразмерных КО в требуемой области околоземного пространства в интересах калибровки наземных РЛС и с учебной целью, а также для контроля параметров плотности верхних слоев атмосферы.
На корпусе КА установлены панели солнечных батарей, выдвижная штанга гравитационной стабилизации, антенны командной радиолинии и радиотелеметрической системы.
В различные периоды времени КА модернизировались и совершенствовались. При этом в основе создания многоэлементных КА использовалась унифицированная базовая конструкция, разработанная фирмой , которая одновременно применялась и для исследовательских спутников серии «Интеркосмос».
Специальная бортовая аппаратура, установленная на КА могла использоваться по целевому назначению в интересах организаций МО и промышленности, непосредственно связанных с эксплуатацией и разработкой информационных систем Войск РКО. «Руководством по применению космических аппаратов. » определен порядок работы организаций при использовании КА по целевому назначению с задействованием той или иной аппаратуры:
аппаратуры внешнетраекторных измерений;
эталонных сферических отражателей (ЭСО);
системы отстрела эталонных отражателей (СОТ);
аппаратуры определения скорости отстрела эталонных отражателей;
системы импульсной световой сигнализации (СИСС);
оптических уголковых отражателей (ОУО);
регистраторов оптического излучения (РОИ).
Комплекс бортовой служебной аппаратуры КА унифицирован по комплектациям и включает: аппаратуру системы командно-программной траекторной радиолинии (КПТРЛ); аппаратуру радиотелеметрической системы (РТС); систему успокоения, ориентации и стабилизации КА (СУОС); систему определения ориентации (СОО).
Реализация записи отраженного сигнала от КА «Вектор», «ЮГ» и «Ромб» приведена на рис.2. ЭПР КА «Ромб» носит резко выраженный флюктуирующий характер, обусловленный его сложной геометрической формой.

Рис.2. Реализация записи отраженного сигнала от калибровочного (1), юстировочного — при убранных антеннах КПТРЛ (2) и многоэлементного (3) космических аппаратов по результатам наблюдения РЛС сантиметрового диапазона волн.
1.4. Орбитальная структура космических аппаратов и порядок её восполнения
Основу постоянно действующей системы (ПДС) обеспечения испытаний составляют КА «Юг»,»Вектор»,»Ромб», которые запускаются с учетом задач Войск РКО на круговые и эллиптические орбиты.
В соответствии с требованиями на РКК «Тайфун» одновременно на орбитах могло находиться 6 КА «Ромб» и «Вектор» различной модификации (в том числе не более трёх КА «Вектор» и не более четырех КА «Ромб») и, в соответствии с требованиями к КА «Юг», — 3-4 КА «Юг».
Таким образом, общее количество КА, находящихся на орбитах в составе ПДС, составляло 9-10 КА. В зависимости от модификации КА могли выводиться на орбиты с параметрами: по наклонению плоскости орбиты к плоскости экватора — от 51 до 83 градусов, по высоте — от 280 до 2000 км. Такой состав и орбитальная структура КА обеспечивает решение широкого круга задач отработки, испытаний и поддержания в боевой готовности всех средств РКО.
Спрос на использование КА по целевому назначению достигал еженедельно до 35 заявок. Порядок организации запусков, сопровождение КА в орбитальном полете, изложены в, специально разработанных, «Руководствах по применению КА «Юг», «Вектор» и «Ромб» при отработке, испытаниях и поддержании боевой готовности средств Войск ПВО».
В cоответствии с «Руководствами. » запуски КА «Ромб», «Вектор» и КА «Юг» для поддержания структуры ПДС планировались с учетом текущих и перспективных потребностей обеспечения отработки, испытаний и поддержания в боевой готовности локационных средств систем ПРО, ПКО, ПРН и прогнозируемой космической обстановки.
Наряду со спутниками важнейшими элементами ПДС являются:
- наземный комплекс управления (УНКС),осуществляющий командно-программное управление полетом КА и прием на Земле информации о состоянии работы бортовой аппаратуры КА; испытательный Центр и Центр контроля космического пространства (Войск РКО), осуществляющие прогноз движения КА, отделяемых с КА элементов и взаимодействие с объектами испытаний и научно-исследовательскими организациями (рис. 3.).
Запуски юстировочных и калибровочных КА в СССР были начаты в 1964 г., многоэлементных — в 1974 г. Всего за период 1964-1991 г. было запущено до 150 КА этого типа.
В настоящее время на околоземных орбитах находятся несколько юстировочных КА (11Ф633) «Вектор», запущенных в 1990-1994 гг. и прекративших своё активное существование, а также два калибровочных КА (17 Ф31) «Юг»(Космос 2265,2332),запущенных в 1993 и 1996 г. на высокоэллиптические орбиты. Благодаря известным отражательным характеристикам, по целеуказаниям с ЦККП, эти спутники могут успешно использоваться по целевому назначению.

Рис.3 Схема управления и функционирования ПДС при испытаниях и контроле характеристик РЛС с использованием ИСЗ.
2. Характеристика юстировочных и калибровочных космических аппаратов, используемых в США
1. 1964 г. ВМС США осуществили вывод на орбиту сфер для калибровочных целей, оценки влияния слабых солнечных бурь на орбитах спутников. Три пустотелые, полированные алюминиевые сферы, диаметром 355 мм. Две из них массой 1 кг и 10 кг запущены на круговые полярные орбиты высотой 1000 км. Третья сфера окрашена специальной белой краской с излучающей способностью 85%, поглощающей -15% (номер сфер по каталогу 900,902,1520). Наклонение плоскости орбиты (град) — 89,902; 89,897; 90,018. Высота в апогее — 1052 км, в перигее — 1052,9 км. Масса сфер (кг) — 0,98; 9,8; 3,5. Площадь проекции (м2) — 0,0987; 0,0987; 0,0987.
2. 1967 г. Вывод на орбиту двух пустотелых сфер ВМС США для калибровки РЛС и изучения плотности атмосферы. Сферы SDS N 2909,1967-53 и SDS N 2886,1967-53 В. Номер по каталогу 2209 и 2806. Период обращения 103,366;103,408 мин. Угол наклона плоскости орбиты — 69,972;69,069 град. Высота в перигее и апогее — 910,22; 911,67 км. Масса (кг) — 1,55; 2,48. Диаметр (м) — 0,406; 0,506. Площадь проекции (м2) — 0,130; 0,203. Данные о калибровочных сферах были опубликованы в печати для специалистов и исследователей, изучающих плотность атмосферы.
3. 1970 г. В рамках программы «DEFENDER» разработан пассивный спутник для калибровки наземных РЛС, предназначенных для наблюдения за КО, и для оценки возможностей РЛС по определению ориентации целей. Одна из конструкций ИСЗ, состоит из четырех «точечных» элементов, расположенных на вершинах тетраэдра. По взглядам специалистов, использование единой эталонной цели полезно для сравнения результатов измерений характеристик других объектов, проводимых РЛС, разнесенными на большие расстояния. Для измерения ЭПР цели желательно с большой точностью знать характер сигнала излучаемого РЛС, т. е. поляризацию и модуляционные характеристики зондирующего сигнала. Проводящая сфера является идеальной испытательной целью, поскольку её рассеивающие свойства хорошо известны и не зависят от ориентации сферы.
4. 1977-1981г. Применение ИСЗ с приемоответчиком, работающим по одновременному запросу с трех наземных станций, разнесенных на расстояние 500-800 км. В состав каждой наземной станции входит аппаратура для обнаружения и слежения за ИСЗ по сигналам передатчика, установленного на ИСЗ. Точность определения расстояния до ИСЗ не более 15м и рад. cкорости 0,1 м/с.
5. 1977-1981. Проведение многочисленных экспериментов с морскими, воздушными и наземными потребителями системы абонентской навигации. Испытания подтвердили возможность использования навигационной аппаратуры на борту КА. При этом точность определения текущего положения КА на орбите при полном развертывании системы (24 КА «Навстар») оценивалась для низкоорбитальных КА величиной 10-15 м.
6. 1993 г. С авиабазы Ванденберг (Калифорния) произведен запуск малого военного спутника системы «Рэдкал». Спутник массой 87 кг. был выведен на околоземную полярную орбиту высотой 828 км ракетой «Скаут». Cпециалисты США считают, что этот спутник будет служить «путеводной звездой» для навигационных спутников системы «Навстар», а также примерно, для 70 разбросанных по всему миру военных и гражданских РЛС американского управления по аэронавтике и исследованию космического пространства (НАСА) МО и энергетики США. Полученные данные о параметрах движения спутника на орбите используются для оценки точности измерений наземных радаров.
7. Использование ИСЗ, запускаемого с 1976 г. с базы Ванденберг. Наклонение орбиты 110 градусов, высота в апогее 5945 км, высота в перигее 5840 км. Форма спутника — шар диаметром 0,61 м. Стартовая масса 411 кг. Оборудован уголковыми отражателями для лазерной локации. Обеспечивает измерение расстояния от ИСЗ до земной поверхности с точностью 2 см.
8. В 1994 г. проведен демонстрационный эксперимент с использованием трех пар калибровочных ИСЗ-сфер диаметром 2,4 и 6 дюйма, изготовленных из нержавеющей стали и алюминия. Вывод на орбиту сфер высотой 352 км и наклонением 57° осуществлен с помощью МТКК «Дискавери». ИСЗ предназначены для точной калибровки РЛС типа «Хейстак», обладающей разрешающей способностью по дальности 25 см. и возможностью формировать плоское изображение ИСЗ путем обработки устойчивых широкополосных когерентных сигналов, а также обнаруживать и измерять параметры малоразмерных орбитальных фрагментов на дальности 1000 км.
9. В рамках программы СОИ в 1988 г. проводился эксперимент («Дельта-181») с использованием отражателей различных конфигураций по проверке способов слежения за ракетами и отработке методов селекции боеголовок (БГ) среди ложных целей (ЛЦ). В ходе эксперимента предусматривалось решение следующих задач: формирование модели СБЦ на внеатмосферном участке траектории полета путем отстрела с КА до 15 элементов, имитирующих СБЦ с ложными и реальными целями; отработку методов обнаружения и селекции БГ среди ЛЦ по данным измерений датчиковых систем ИК-диапазона, установленных на второй ступени ракеты «Дельта» и КА; отработку датчиковых систем ИК-диапазона.
Анализ создаваемых в СССР и США спутников юстировочно-калибровочного класса показывает их важную обеспечивающую роль при отработке новых технологий, испытаниях и эксплуатации информационных средств РКО.
Прекращение работ по их созданию и развитию в РФ отрицательно влияет на многие важные направления работ в области ПРО, ПРН, ПКО и ККП.
Несмотря на финансовые ограничения, работы в области создания спутников юстировочно-калибровочного класса должны быть продолжены. В 1994-1995 гг. МАК «Вымпел», совместно с кооперацией соисполнителей, были обоснованы направления развития спутников этого класса в интересах всех средств РКО. Кроме того, были представлены предложения ИЗМИРАН и НПО «Элас» по оснащению этих ИСЗ высокотехнологичной, малогабаритной научной аппаратурой, расширяющей возможности их использования по целевому назначению и, в том числе, международному сотрудничеству.
Однако, работы в этой области были приостановлены в связи с реструктуризацией Войск ПВО.
В настоящее время в интересах модернизации и развития средств РКО актуально уточнение требований систем РКО к спутникам этого класса и определение кооперации разработчиков. Учитывая финансовые ограничения, целесообразно определить приоритетные направления их развития, одновременно рассмотрев возможности вывода КА этого типа на орбиту совместно с другими типами малоразмерных спутников.
При этом одной из первейших задач, на наш взгляд, должно быть принятие решения Заказчиком о создании юстировочно-калибровочного КА, оснащенного навигационной аппаратурой потребителей ГЛОНАСС, что повысит точность и достоверность контроля характеристик информационных средств, повысит эффективность его использования по целевому назначению, сократит объем требуемых при испытаниях и эксплуатации проводок ИСЗ средствами РКО.
1. Гозюмов исследовательские спутники юстировочно-калибровочного класса. МАК «Вымпел», 1996.
2. Сферы для калибровки РЛС наблюдения за орбитальными осколками, Перевод, 827-9, ГОНТИ МАК «Вымпел», 1994.
3. Тарасенко аспекты советской космонавтики, М., Агенство Российской печати, ТОО «Николь», 1992.