Энтальпию продуктов сгорания в камере сгорания в кинетическую энергию струи можно преобразовать различными способами: подводом теплоты и массы по тракту постоянной геометрии, ускорением в сужающихся и расширяющихся соплах.
Обычно используют сопло переменной геометрии — осесимметричное сопло Лаваля как наиболее простой и надежный геометрический способ разгона рабочего тела.
Под тягой двигателя понимают результирующую сил, действующих на внутреннюю поверхность тракта, и сил воздействия невозмущенной окружающей среды на внешнюю поверхность двигателя, кроме сил аэродинамического сопротивления.
Рассмотрим двигатель на рис. 2.2.
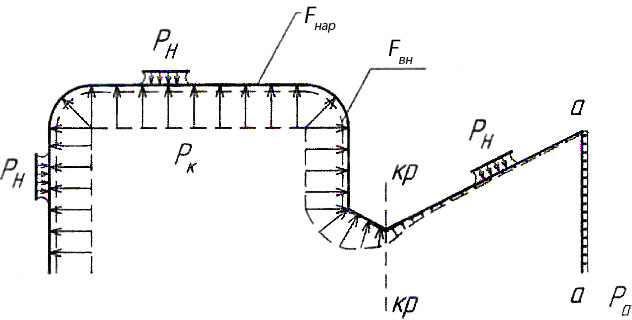
Рис. 2.2. Схема возникновения тяги ракетного двигателя
Границей между внутренней и наружной поверхностями является срез выходного сечения сопла а-а, рабочее тело — идеальный газ, массовые силы отсутствуют. В соответствии с определением, при постоянном давлении окружающей среды рн тяга есть сумма интегралов сил давления по наружной и внутренней поверхностям двигателя
 . (2.1)
. (2.1)
Так как вектор сил давления замкнутой наружной поверхности равен нулю, то

 . (2.2)
. (2.2)
Значение второго интеграла в (2.l) определим с помощью теоремы импульсов: изменение количества движения за единицу времени объема газа равно результирующей внешних сил, действующих на этот объем. В ракетной технике есть фундаментальное понятие: расход рабочего тела  , кг/с — масса рабочего тела, истекающая через срез сопла в единицу времени со скоростью
, кг/с — масса рабочего тела, истекающая через срез сопла в единицу времени со скоростью  Течение газа рассматриваем одномерным, положительное направление оси совпадает с направлением тяги, значением скорости газа в камере сгорания пренебрегаем.
Течение газа рассматриваем одномерным, положительное направление оси совпадает с направлением тяги, значением скорости газа в камере сгорания пренебрегаем.
 ,
,
 .
.
 .
.
При осесимметричном одномерном течении идеального газа формула тяги имеет вид
 . (2.3)
. (2.3)
Вектор тяги направлен по оси двигателя, размерность тяги – ньютон (система СИ), кгс (ТСЕ). Возникает вопрос: куда же приложена сила тяги? Если двигатель расположен на стенде, то интеграл сил давления (2.1) (тяга РД) передается именно датчику для измерения тяги, как показано на рис. 2.3. Для измерения тяги и проводится испытание двигателя при постоянном барометрическом давлении pн. В составе ракеты тяга двигателя передается на раму крепления или к соединительному отсеку в соответствии с рис. 2.4.
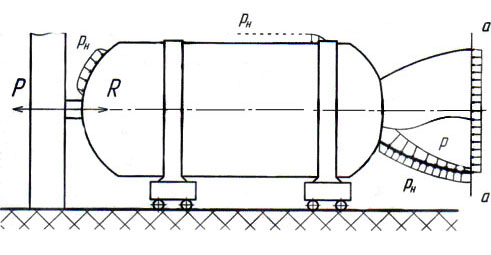
Рис 2.3. Схема приложения тяги двигателя на стенде
R — реакция опор
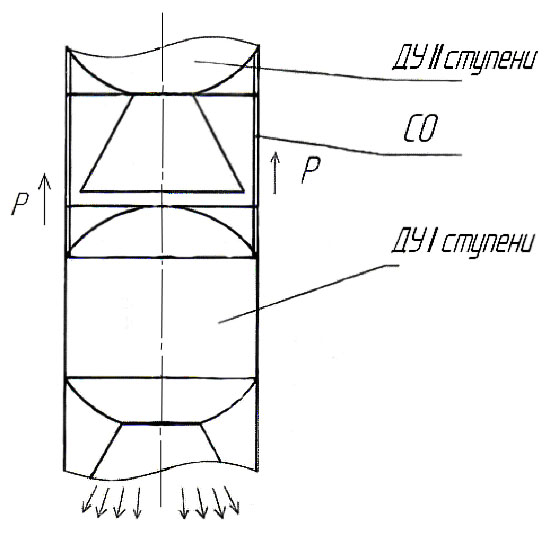
Рис 2.4. Схема приложения тяги двигателя I ступени к конструкции ракеты
Характерными в определении тяги являются:
1.Тяга в пустоте (рн = 0)
 . (2.4)
. (2.4)
С позиций разработчика ракеты удобно ввести понятие эффективной скорости истечения  , тогда
, тогда  .
.
2.Тяга на произвольной высоте Н в атмосфере (активный участок полета)
 . (2.5)
. (2.5)
 . (2.6)
. (2.6)
 . (2.7)
. (2.7)
5.Тяга на режиме равенства давлений потока на срезе сопла и окружающей среды (расчетный режим работы сопла)
 . (2.8)
. (2.8)
Из (2.8) следует, что необходимо получать как можно большее значение скорости истечения продуктов сгорания на срезе сопла при заданном расходе. А скорость истечения пропорциональна величине  , именно поэтому продукты сгорания топлив имеют высокое значение температуры (до 4000 К).
, именно поэтому продукты сгорания топлив имеют высокое значение температуры (до 4000 К).
Для современных РД характерен широкий диапазон тяг: от нескольких грамм (двигатели коррекции, стабилизации и т.п.) до сотен тонн — РД 180 P0 ≈ 800т., F1 Р0 ≈ 700т., РДТТ «Шаттл» Р0 ≈ 1200т.
СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ

Схема управляющих моментов ступени:
Для управления полетом ЛА по каналам (плоскостям) тангажа курса и крена (рис. 22.1) используются различные типы систем управления вектором тяги (СУВТ), т. е. различные органы управления. Прежде чем выбрать ту или иную СУВТ необходимо определить потребный управляющий момент для конкретного изделия (потребную управляющую силу).
Мт — момент тангажа; Мр — момент рыкания; Мкр — момент крена.
В настоящей главе рассмотрен общий подход определения потребного управляющего момента и шарнирного момента органов управления. Большое место отводится рассмотрению различных типов СУВТ и методам расчета боковых управляющих сил.
ПОТРЕБНЫЕ УПРАВЛЯЮЩИЕ СИЛЫ
Система управления вектором тяги совместно с приводом входят в состав контура управления ЛА (ступенью) и являются его исполнительным звеном. СУВТ состоит из органов управления, привод — из рулевой машинки, передаточного механизма и датчика обратной связи.
СУВТ создает силы и моменты для программного разворота и стабилизации положения изделия, а привод осуществляет по определенному закону перемещения и удержание органов управления в заданном направлении. Принцип функционирования СУВТ состоит в том, что поступающий из усилительно-преобразовательного блока в рулевую машинку сигнал, преобразуется в перемещение управляющего элемента, а силовая часть рулевой машинки развивает необходимое для соответствующего перемещения органа управления усилие.
Для выбора в процессе проектирования характеристик СУВТ и необходимо знать величину потребного управляющего момента для каналов (плоскости)

Схема влияния горизонтального ветра на возмущение ступени ЛА в плоскости тангажа машинки развивает необходимое для соответствующего перемещения органа управления усилие
тангажа, курса и крена. Момент для канала тангажа состоит из двух составляющих — момента, необходимого для программного разворота ступени, и момента стабилизации. Потребный управляющий момент для каналов курса и крена обеспечивает стабилизацию ступени в этих плоскостях.
Как правило, потребный управляющий момент по тангажу М.г значительно превосходит момент для стабилизации по крену, поэтому при совмещении СУВТ управления по тангажу и крену в качестве исходного принимается потребный управляющий момент по тангажу.
Потребный управляющий момент для стабилизации изделия складывается из моментов, вызванных случайными факторами, такими как возмущения, возникающие в момент разделения ступеней, возмущения от действия ветровых нагрузок и от суммарного эксцентриситета (смещения) вектора тяги относительно центра масс ЛА. Первые два вида возмущений относятся к внешним, третий — к внутренним возмущениям.
При расчете ветровых нагрузок необходимо иметь статистические данные о законе распределения горизонтальной составляющей скорости ветра в зависимости от высоты, характеристики порывов ветра, угла траектории изделия, аэродинамические характеристики, а также расстояние между центром масс и центром давления изделия.
Действие горизонтального ветра эквивалентно изменению угла атаки, вызывающему появление возмущений подъемной силы Yy и возмущающего момента Му’
а) по тангажу (22.2) 
б) по курсу (рис. 22.3), аналогично

Схема влияния горизонтального ветра на возмущение ступени ЛА по курсу

В зависимостях (22.1). (22.4) Су С^ а> — производные коэффициентов подъемной силы и момента по углу атаки а соответственно; Хц д, Хц м — расстояние от носика изделия до центра давления и центра масс соответственно; Аав т, Д|3В к — приращение угла атаки от действия горизонтального ветра в плоскости тангажа и курса соответственно; q’ — скоростной напор; Sm — площадь миделевого сечения.
Эксцентриситет вектора тяги обусловлен несовпадением линии действия реактивной силы с геометрической осью ракеты. Основные нарушения симметрии РДТТ и газового потока возникают за счет производственных допусков на основные узлы (элементы) двигателя неравномерной деформации двигателя и его сопловой полости в процессе хранения, транспортировки и запуска, неравномерности уноса массы материала с боковой поверхности соплового блока в процессе его функционирования.
Эксцентриситет реактивной силы оказывает основное влияние на возникновение возмущающих факторов при движении ЛА на активном участке траектории. Угловой эксцентриситет реактивной силы (угол между вектором тяги и осью сопла 0 обусловлен несимметричными возмущениями газового потока в полости соплового блока.
Суммарный эксцентриситет тяги состоит из трех составляющих: газодинамического, технологического и деформационного эксцентриситетов.
В общем случае при газодинамическом, технологическом и деформационном эксцентриситетах тяги возмущающие силы носят случайный характер, они взаимосвязаны и взаимообусловлены и, таким образом, оказывают влияние друг на друга. Однако учесть это влияние весьма сложно, поэтому будем полагать, что возмущающие силы независимы друг друга. В этой связи среднеквадратичное суммарное значение возмущающих сил Рэ1 можно определить по соотношению 
Газодинамический эксцентриситет тяги обусловлен несимметричными возмущениями газового потока как в сужающейся, так и расширяющейся частях соплового блока.
Относительная боковая возмущающая сила, обусловленная несимметрией предсопловох’о объема и входной части сопла и распространяющаяся по всему соплу, включая выходное сечение, может быть определена на основе теории возмущений одномерного сверхзвукового течения по соотношению

где Ру.а =-Ру.а/-Ру.кр> Му.а =Му.а/(Ру.крГу.кр) — относительная боковая возмущающая сила и возмущающий момент в выходном сечении сопла; Р кр — боковая сила в критическом сечении сопла при x = 0fvf2 — функции, зависящие от профиля расширяющейся части сопла г(х) и

Возмущение силы и моменты в выходном сечении сопла
свойств продуктов сгорания п =

Связь между боковой возмущающей силой и возмущающим моментом в выходном сечении сопла определяется по дополнительным соотношениям (рис. 22.4)

или 
где dPу а — приращение боковой силы на участке х. (х + dx), обусловленное несимметричностью распределения давления на внутреннюю стенку сопла.
Эксцентриситет тяги из-за нарушения симметрии потока в области выходной части сопла можно определить по результирующим силам давления на неуравновешенную часть сопла. При наличии косого среза (при малом значении у) 
где у — угол между плоскостями косого среза и поперечного сечения; произведение Рау — площадь боковой поверхности косого среза.
Значение силы по оси сопла х можно определить по соотношению

Угловой эксцентриситет (угол между направлением силы тяги и осью сопла) в этом случае будет равен

Газодинамический эксцентриситет тяги также зависит от противодавления и изменяется в процессе работы двигателя за счет неравномерного разгара, главным образом, сужающейся и расширяющейся частей сопла. Для малогабаритных РДТТ газодинамический эксцентриситет тяги может составлять 3′-12′.
Технологический эксцентриситет обусловлен несимметрией корпуса заряда ТТ и других элементов двигателя относительно оси изделия. Эти отклонения, как правило, связаны с производственными допусками на изготовление и сборку двигателя и ракеты.
Значения возможных перекосов, обусловленные погрешностями технологического характера, определяются по допускам на изготовление и сборку РДТТ, а положение центра масс (смещение по радиусу изделия) может быть определено как расчетным (по чертежам эскизного или технического проекта), так и опытным путем на специальном балансировочном стенде.
Значение технологического эксцентриситета лимитируется точностью изготовления отдельных элементов (агрегатов) и сборки двигателя.
Деформационный эксцентриситет является следствием несимметричной деформации корпуса двигателя и сопла и возникает в связи с действием на корпус двигателя и сопловой агрегат силовых и температурных факторов. К числу силовых факторов можно отнести давление и, особенно, скорость его роста для периода воспламенения и выхода РДТТ на стационарный режим работы. Массовые и инерционные силы, возникающие при хранении, транспортировке и в полете под действием перегрузок, также могут оказывать влияние на значение и изменение деформационного эксцентриситета.
Значение деформационного эксцентриситета зависит от конструктивных особенностей двигателя, а также от точности изготовления (отдельных элементов) и сборки РДТТ.
Технологический и деформационный эксцентриситеты тяги, связанные с факторами технологического характера и несимметричной деформацией во время полета изделия, а также упругие колебания корпуса приводят к смещению центра масс ракеты (ступени) относительно продольной оси. Это обстоятельство вызывает возникновение линейного эксцентриситета тяги е и возмущающего момента Му т д.
Возмущающий момент определяют по соотношению

Перекос и неравномерный разгар по периметру и длине проточной части соплового блока приводит также к возникновению линейного и углового эксцентриситетов тяги.
При отклонении оси сопла от оси ракеты на угол (рис. 22.5) боковая возмущающая сила и возмущающий момент могут быть определены по соотношениям

где L — длина ЛА.

Зависимость относительной боковой силы от угла О
В период разделения ступеней кроме эксцентриситета тяги и ветровых возмущений на изделие действуют возмущающие факторы, обусловленные процессом разделения. К ним относятся:
- 1) разность тяг отсечных устройств (если они имеются на двигателе);
- 2) несинхронность срабатывания соединительных механизмов (соединительные болты, штокеры идр.); разность тяг сопел в случае использования для двигателя соплового блока многосопловой конструкции и др.
Потребная величина возмущающих сил и моментов должна быть заданной функцией от времени работы двигателя той или иной ступени и является исходной при выборе СУВТ с соответствующими управляющими силами. Потребный управляющий момент по плоскостям курса и крена должен обеспечить компенсацию максимального возмущающего момента, обусловленного действием всех возмущающих факторов. Потребный же управляющий момент по плоскости тангажа должен обеспечить с одной стороны программный разворот ступени, с другой — скомпенсировать действие всех возмущающих факторов.
Программное движение центра масс изделия (ступени) задается, в свою очередь, программой изменения угла тангажа фпр, по которой можно определить программу изменения угла атаки апр.
Управляющий программный момент Му„р, необходимый для создания программного значения угла атаки а11р, можно определить по соотношению

где 
Действие отмеченных возмущающих факторов, обусловленных ветровыми нагрузками, процессом разделения ступеней и эксцентриситетом вектора тяги при движении изделия для первых и последующих ступеней различно. Так, для первой ступени превалирующее влияние на максимальный возмущающий момент оказывают ветровые нагрузки и возмущающие факторы, возникающие при разделении ступеней; их и следует учитывать при расчете потребного управляющего момента первой ступени.
Для второй ступени ЛА в связи с уменьшением плотности атмосферы влияние возмущающего фактора за счет ветровых нагрузок уже не является превалирующим. Здесь при определении потребного управляющего момента (для начального периода полета после отделения первой ступени) необходимо учитывать все возмущающие факторы: ветровые нагрузки, возмущения, связанные с разделением ступеней и эксцентриситетом вектора тяги.
Для третьей ступени необходимый управляющий момент рассчитывается для начального периода движения изделия после отделения второй ступени с учетом возмущающих факторов, обусловленных разделением ступеней и эксцентриситетом вектора тяги, т. е. без учета ветровых нагрузок.
По величине потребного управляющего момента для каждой ступени при известных основных габаритных размерах ракеты и расстояний между центром масс изделия и точкой приложения управляющей силы можно определить потребную управляющую силу.
Основные параметры ракетных двигателей твердого топлива
Тяга двигателя. Тягой двигателя Р называется результирующая газодинамических сил, действующих на внутренние поверхности камеры во время ее работы, и сил воздействия невозмущенной окружающей среды на наружную поверхность камеры, за исключением сил внешнего аэродинамического сопротивления. При таком определении тягу двигателя можно измерять непосредственно на экспериментальном стенде.
Тяга двигателя определяется по следующей формуле:

где т — секундный массовый расход газов; Wa — скорость истечения газов из сопла ракетного двигателя; Fa — площадь среза сопла; ра, рн — давление на срезе сопла и наружное давление соответственно.
Если в составе двигателя имеются устройства для создания управляющих усилий и моментов, то учитывается их вклад АР (как положительный, так и отрицательный) в величину тяги. Тогда осевая составляющая вектора тяги, используемая в расчетах параметров движения ракеты, в соответствии с определением тяги двигателя равна

где 8г — номинальное значение угла между осями камеры xt и осью аппарата; АРх — потери осевой составляющей тяги в связи с работой устройств для создания управляющих усилий и моментов.
При расчетах по этим формулам используются следующие размерности величин.
В международной системе измерения (СИ):

При этом тяга Р выражается в ньютонах (Н).
В технической системе единиц:

При этом тяга Р выражается в кгс.
Численное значение тяги у Земли q0 в единицах СИ в 9,8 раз больше, чем в технической системе единиц.
Импулъс тяги двигателя. Для достижения заданной скорости и высоты подъема в конце активного участка полета ракете на этом участке должен быть сообщен импульс тяги (суммарный, полный) J2. Величина представляет собой интеграл от тяги двигателя, взятый по полному времени его работы:

Импульс тяги — интегральная характеристика, которая определяется опытным путем при записи тяги в процессе работы двигателя, функции времени и представляет собой площадь, заключенную этой осциллограммой.
Изменение тяги по времени представлено на рис. 20.4.

Рис. 20.4. Осциллограмма записи Р(т)
В РДТТ можно использовать среднее значение тяги, если ее изменение во времени незначительное:


где тк — время работы двигателя ракеты на активном участке траектории.
Физический импульс тяги показывает, на что способен двигатель. Размерность суммарного импульса в единицах СИ — Н-с; в технической системе единиц — кг/с.
Удельный импульс. Тяга камеры является параметром, зависящим от абсолютной величины секундного массового расхода топлива т. Относительным, или удельным, параметром является удельный импульс тяги Jy, который представляет собой отношение тяги, развиваемой камерой, к секундному массовому расходу рабочего тела:

Удельный импульс тяги является основной характеристикой экономичности двигателя. Обычно величину Jy называют сокращенно «удельный импульс». Для того чтобы обеспечить заданную тягу, необходимо обеспечить определенный расход топлива. Чем больше значение Jy, тем меньше топлива необходимо для обеспечения заданной тяги.
Удельный импульс на расчетном режиме работы камеры Jy равен скорости истечения газов из сопла We.
В отличие от других типов ракетных двигателей в РДТТ трудно фиксировать мгновенные значения массового или объемного расхода топлива, а следовательно, и мгновенные значения Jy. Поэтому для РДТТ удельный импульс, как правило, определяется в некотором интервале времени т (например, за время работы двигателя) как среднее значение:


Эту величину в практике РДТТ называют единичным импульсом.
Удельный импульс Jy в зависимости от системы измерений может иметь различную размерность, а следовательно, различный физический смысл.
В единицах СИ тяга Р выражается в ньютонах (Н), а секундный массовый расход т — в кг/с, следовательно, Jy— в Н-с/кг. Физический смысл параметра Jy — это сила, которую может создать двигатель при сгорании 1 кг топлива за 1 с.
Расходный комплекс. По физическому смыслу расходный комплекс камеры (3 — это удельный импульс камеры, но без сопла.
Расходным комплексом камеры (3 называют произведение давления в некотором сечении камеры сгорания на площадь минимального сечения, отнесенное к секундному массовому расходу топлива через камеру:

Если вместо расхода подставить в выражение его значение, равное:


Из последнего выражения видно, что расходный комплекс (3 зависит только от рода топлива и качества его сжигания. Комплекс 3 используется при различных анализах характеристик камеры. Он имеет размерность удельного импульса.
Величина (3 может быть получена как теоретически, так и экспериментально. Сравнение экспериментальных значений с теоретическими используется для оценки совершенства процессов на участке камеры сгорания и в сужающейся части сопла.
Тяговый комплекс. Тяговый комплекс Кр представляет собой отношение тяги к ее основной составляющей:

Тяговый комплекс показывает, во сколько раз тяга камеры с соплом больше тяги камеры, не имеющей сопла, т. е. показывает роль сопла в создании тяги. Величина Кр безразмерная. Для современных двигателей Кр = 1,5 -г- 2,0. Отсюда видно, что роль сопла в создании тяги значительна.
Величину Кр можно определить и как отношение удельного импульса камеры Jy к расходному комплексу (3, что и является связью между ними:

Все рассмотренные выше параметры присущи любому ракетному двигателю, в том числе и твердотопливному.
Теперь рассмотрим специфические параметры, присущие только РДТТ.
Коэффициент массового совершенства. Коэффициент массового совершенства двигателя адв является важнейшим параметром, необходимым для выполнения массовых расчетов РДТТ.
Коэффициент массового совершенства адв определяется как отношение массы конструкции двигателя к массе топлива:

Чем это отношение меньше, тем совершеннее двигатель. Параметр адв безразмерный. Коэффициент массового совершенства адв оказывает большое влияние на стартовую массу ракеты с РДТТ: