С помощью данного онлайн-калькулятора можно получить:
- решение двойственной задачи линейного программирования через решений прямой задачи (симплексным методом, по теореме двойственности);
- оптимальный план двойственной задачи; оценки ресурсов (двойственные оценки);
- определение дефицитных и недефицитных (избыточных) ресурсов;
- изменение целевой функции при изменении параметров; обоснование эффективности оптимального плана;
- анализ устойчивости двойственных оценок (предельное изменение bi, ci); анализ субоптимальных вариантов плана.
- решение задачи о расшивке узких мест производства.
- Шаг №1
- Шаг №2
- Видеоинструкция
- Оформление Word
Основная идея теории двойственности: для каждой задачи линейного программирования (ЛП) существует некоторая задача ЛП, решение которой тесно связано с прямой. При этом:
- матрица ограничений двойственной задачи (ДЗ) есть транспонированная матрица прямой задачи;
- вектор «цен» для прямой задачи есть вектор правых частей ограничений задачи ДЗ и наоборот.
Общие правила составления двойственной задачи (более подробно):
| Прямая | Двойственная |
| Целевая функция (max) | Правая часть ограничений |
| Правая часть ограничений | Целевая функция (min) |
| A — матрица ограничений | A T – матрица ограничений |
| i -ое ограничение: ≤ 0, (≥ 0) | Переменная yi ≥ 0, (≤ 0) |
| i -ое ограничение: = 0 | Переменная yi≠ 0 |
| Переменная xj ≥ 0 (≤ 0) | j -ое ограничение: ≤ 0 (≥ 0) |
| Переменная xj ≠ 0 | j -ое ограничение: = 0 |
Пример . Определим максимальное значение целевой функции F(X) = 3x1 +5x2 +4x3 при следующих условиях-ограничений.
0.1x1 + 0.2x2 + 0.4x3≤1100
0.05x1 + 0.02x2 + 0.02x3≤120
3x1 + x2 + 2x3≤8000
Решим прямую задачу симплексным методом.
Для построения первого опорного плана систему неравенств приведем к системе уравнений путем введения дополнительных переменных.
0.1x1 + 0.2x2 + 0.4x3 + 1x4 + 0x5 + 0x6= 1100
0.05x1 + 0.02x2 + 0.02x3 + 0x4 + 1x5 + 0x6= 120
3x1 + 1x2 + 2x3 + 0x4 + 0x5 + 1x6= 8000
Базисные переменные это переменные, которые входят только в одно уравнение системы ограничений и притом с единичным коэффициентом.
Решим систему уравнений относительно базисных переменных: x4 , x5 , x6
Полагая, что свободные переменные равны 0, получим первый опорный план: X1 = (0,0,0,1100,120,8000)
Поскольку задача решается на максимум, то ведущий столбец выбирают по максимальному отрицательному числу и индексной строке. Все преобразования проводят до тех пор, пока не получатся в индексной строке положительные элементы.
Переходим к основному алгоритму симплекс-метода.
| План | Базис | В | x 1 | x 2 | x 3 | x 4 | x 5 | x 6 | min |
| 1 | x 4 | 1100 | 0.1 | 0.2 | 0.4 | 1 | 0 | 0 | 5500 |
| x 5 | 120 | 0.05 | 0.02 | 0.02 | 0 | 1 | 0 | 6000 | |
| x 6 | 8000 | 3 | 1 | 2 | 0 | 0 | 1 | 8000 | |
| Индексная строка | F(X1) | 0 | -3 | -5 | -4 | 0 | 0 | 0 | 0 |
Текущий опорный план неоптимален, так как в индексной строке находятся отрицательные коэффициенты
В качестве ведущего выберем столбец, соответствующий переменной x2, так как наибольший коэффициент по модулю.
Вычислим значения Di по строкам как частное от деления и из них выберем наименьшее:
Следовательно, 1-ая строка является ведущей. Разрешающий элемент равен 0.2 и находится на пересечении ведущего столбца и ведущей строки. Формируем следующую часть симплексной таблицы. Вместо переменной x в план 1 войдет переменная x2. Строка, соответствующая переменной x2 в плане 1, получена в результате деления всех элементов строки x4 плана 0 на разрешающий элемент РЭ=0.2. На месте разрешающего элемента в плане 1 получаем 1. >В остальных клетках столбца x2 плана 1 записываем нули.
Таким образом, в новом плане 1 заполнены строка x2 и столбец x2.
Все остальные элементы нового плана 1, включая элементы индексной строки, определяются по правилу прямоугольника.
Для этого выбираем из старого плана четыре числа, которые расположены в вершинах прямоугольника и всегда включают разрешающий элемент РЭ.
НЭ = СЭ — (А*В)/РЭ
СТЭ — элемент старого плана, РЭ — разрешающий элемент (0.2), А и В — элементы старого плана, образующие прямоугольник с элементами СТЭ и РЭ.
Представим расчет каждого элемента в виде таблицы:
Посмотреть таблицу
| План | Базис | В | x 1 | x 2 | x 3 | x 4 | x 5 | x 6 | min |
| 2 | x 2 | 5500 | 0.5 | 1 | 2 | 5 | 0 | 0 | 11000 |
| x 5 | 10 | 0.04 | 0 | -0.02 | -0.1 | 1 | 0 | 250 | |
| x 6 | 2500 | 2.5 | 0 | 0 | -5 | 0 | 1 | 1000 | |
| Индексная строка | F(X2) | 27500 | -0.5 | 0 | 6 | 25 | 0 | 0 | 0 |
Итерация №1
Текущий опорный план неоптимален, так как в индексной строке находятся отрицательные коэффициенты. В качестве ведущего выберем столбец, соответствующий переменной x1, так как наибольший коэффициент по модулю.
Вычислим значения Di по строкам как частное от деления и из них выберем наименьшее:
Следовательно, 2-ая строка является ведущей. Разрешающий элемент равен 0.04 и находится на пересечении ведущего столбца и ведущей строки. Формируем следующую часть симплексной таблицы. Вместо переменной x в план 2 войдет переменная x1. Строка, соответствующая переменной x1 в плане 2, получена в результате деления всех элементов строки x5 плана 1 на разрешающий элемент РЭ=0.04. На месте разрешающего элемента в плане 2 получаем 1. В остальных клетках столбца x1 плана 2 записываем нули.
Таким образом, в новом плане 2 заполнены строка x1 и столбец x1.
Все остальные элементы нового плана 2, включая элементы индексной строки, определяются по правилу прямоугольника.
Представим расчет каждого элемента в виде таблицы:
Посмотреть таблицу
Конец итераций: найден оптимальный план. Окончательный вариант симплекс-таблицы:
| План | Базис | В | x 1 | x 2 | x 3 | x 4 | x 5 | x 6 | min |
| 3 | x 2 | 5375 | 0 | 1 | 2.25 | 6.25 | -12.5 | 0 | 11000 |
| x 1 | 250 | 1 | 0 | -0.5 | -2.5 | 25 | 0 | 250 | |
| x 6 | 1875 | 0 | 0 | 1.25 | 1.25 | -62.5 | 1 | 1000 | |
| Индексная строка | F(X3) | 27625 | 0 | 0 | 5.75 | 23.75 | 12.5 | 0 | 0 |
Решение двойственной задачи дает оптимальную систему оценок ресурсов.
Используя последнюю итерацию прямой задачи найдем, оптимальный план двойственной задачи.
Из теоремы двойственности следует, что Y = C*A -1 .
Составим матрицу A из компонентов векторов, входящих в оптимальный базис.
Определив обратную матрицу А -1 через алгебраические дополнения, получим:
Как видно из последнего плана симплексной таблицы, обратная матрица A -1 расположена в столбцах дополнительных переменных x4 , x5 , x6 .
Тогда Y = C*A -1 =
Оптимальный план двойственной задачи равен: y1 = 23.75, y2 = 12.5, y3 = 0
Z(Y) = 1100*23.75+120*12.5+8000*0 = 27625
Подставим оптимальный план прямой задачи в систему ограниченной математической модели:
0.1*250 + 0.2*5375 + 0.4*0 = 1100 = 1100
0.05*250 + 0.02*5375 + 0.02*0 = 120 = 120
3*250 + 1*5375 + 2*0 = 6125 0).
2-ое ограничение прямой задачи выполняется как равенство. Это означает, что 2-ый ресурс полностью используется в оптимальном плане, является дефицитным и его оценка согласно второй теореме двойственности отлична от нуля (y2>0).
3-ое ограничение выполняется как строгое неравенство, т.е. ресурс 3-го вида израсходован не полностью. Значит, этот ресурс не является дефицитным и его оценка в оптимальном плане y3 = 0.
Таким образом, отличную от нуля двойственные оценки имеют лишь те виды ресурсов, которые полностью используются в оптимальном плане. Поэтому двойственные оценки определяют дефицитность ресурсов.
При постановке оптимальных двойственных оценок в систему ограничений двойственной задачи получим:
0.1*23.75 + 0.05*12.5 + 3*0 = 3 = 3
0.2*23.75 + 0.02*12.5 + 1*0 = 5 = 5
0.4*23.75 + 0.02*12.5 + 2*0 = 9.75 > 4
1-ое ограничение двойственной задачи выполняется как равенство. Это означает, что 1-ый ресурс экономически выгодно использовать, а его использование предусмотрено оптимальным планом прямой задачи (x1>0).
2-ое ограничение двойственной задачи выполняется как равенство. Это означает, что 2-ый ресурс экономически выгодно использовать, а его использование предусмотрено оптимальным планом прямой задачи (x2>0).
3-ое ограничение выполняется как строгое неравенство, т.е. ресурс 3-го вида использовать экономически не выгодно. И действительно в оптимальном плане прямой задачи x3 = 0.
Величина двойственной оценки показывает, на сколько возрастает значение целевой функции при увеличении дефицитного ресурса на единицу.
Например, увеличении 1-го ресурса на 1 приведет к получению нового оптимального плана, в котором целевая функция возрастает на 23.75 и станет равной: F(x) = 27625 + 23.75 = 27648.75
Проведем анализ устойчивости оптимального плана и оценим степень влияния изменения ресурсов на значение целевой функции.
Пусть каждое значение параметра целевой функции изменится на ∆ сi. Найдем интервалы, при которых будет экономически выгодно использование ресурсов.
1-ый параметр целевой функции может изменяться в пределах:
-3.8 ≤ с1 ≤ 1
Таким образом, 1-параметр может быть уменьшен на 3.8 или увеличен на 1
Интервал изменения равен: [3-3.8; 3+1] = [-0.8;4]
Если значение c1 будет лежать в данном интервале, то оптимальный план не изменится.
2-ый параметр целевой функции может изменяться в пределах:
-0.5 ≤ с2 ≤ 9.5
Таким образом, 2-параметр может быть уменьшен на 0.5 или увеличен на 9.5
Интервал изменения равен: [5-0.5; 5+9.5] = [4.5;14.5]
Если значение c2 будет лежать в данном интервале, то оптимальный план не изменится.
Проведем анализ устойчивости двойственных оценок.
1-ый запас может изменяться в пределах:
-860 ≤ b1 ≤ 100
Таким образом, 1-ый запас может быть уменьшен на 860 или увеличен на 100
Интервал изменения равен: [1100-860; 1100+100] = [240;1200]
2-ый запас может изменяться в пределах:
-10 ≤ b2 ≤ 30
Таким образом, 2-ый запас может быть уменьшен на 10 или увеличен на 30
Интервал изменения равен: [120-10; 120+30] = [110;150]
Составим субоптимальные варианты плана с учетом изменений исходных данных модели (таблицы).
Пусть 2-ый ресурс увеличили на 50
| Базисные переменные | Значение базисных переменных | Коэффициент структурных сдвигов k c | Произведение k c на (50) | Расчет варианта плана |
| x 2 | 5375 | 6.25 | 312.5 | 5687.5 |
| x 1 | 250 | -2.5 | -125 | 125 |
| x 6 | 1875 | 1.25 | 62.5 | 1937.5 |
| F(X) | 27625 | 23.75 | 1187.5 | 28812.5 |
| Базисные переменные | Значение базисных переменных | Коэффициент структурных сдвигов k c | Произведение k c на (-5) | Расчет варианта плана |
| x 2 | 5375 | -12.5 | 62.5 | 5437.5 |
| x 1 | 250 | 25 | -125 | 125 |
| x 6 | 1875 | -62.5 | 312.5 | 2187.5 |
| F(X) | 27625 | 12.5 | -62.5 | 27562.5 |
Задание : Для исходной задачи составить двойственную. Решить обе задачи симплексным методом или двойственным симплексным методом и по решению каждой из них найти решение другой. Одну из задач решить графическим методом.
F(X) = 3x1 + x2 → min
— 2x1 + x2≥4
2x1 + x2≤8
3x1 + 2x2≥6
Решение.
I этап. Приводим систему к каноническому виду.
II этап. Решаем симплекс-методом.
Примечание: Если задача решается данным калькулятором, то предыдущие два этапа пропускаем, поскольку они автоматически включены в решение.
На втором этапе окончательный вариант симплекс-таблицы имеет вид:
| Базис | B | x1 | x2 | x3 | x4 | x5 | x6 | x7 |
| x5 | 2 | -7 | 0 | -2 | 0 | 1 | 2 | -1 |
| x4 | 4 | 4 | 0 | 1 | 1 | 0 | -1 | 0 |
| x2 | 4 | -2 | 1 | -1 | 0 | 0 | 1 | 0 |
| F(X3) | 4 | -5 | 0 | -1 | 0 | 0 | 1-M | -M |
Так как в оптимальном решении отсутствуют искусственные переменные (они равны нулю), то данное решение является допустимым. Записываем оптимальный план:
x1 = 0, x2 = 4, F(X) = 1•4 = 4
Составим двойственную задачу к прямой задаче.
— 2y1 + 2y2 + 3y3≤3
y1 + y2 + 2y3≤1
4y1 + 8y2 + 6y3 → max
y1 ≥ 0, y2 ≤ 0, y3 ≥ 0
Используя последнюю итерацию прямой задачи найдем, оптимальный план двойственной задачи. Из теоремы двойственности следует, что Y = C*A -1 . Составим матрицу A из компонентов векторов, входящих в оптимальный базис.
| A = (A5, A4, A2) = |
|
Определяем обратную матрицу D = А -1 через алгебраические дополнения:
| D = A -1 = |
|
Обратите внимание, обратная матрица A -1 расположена в столбцах дополнительных переменных окончательного варианта симплекс-таблицы. Тогда Y = C*A -1 =
| (0, 0, 1) x |
| = (1;0;0) |
Примечание: см. как умножать матрицы.
Оптимальный план двойственной задачи равен (двойственные оценки): y1 = 1, y2 = 0, y3 = 0, Z(Y) = 4*1+8*0+6*0 = 4
Двойственные оценки определяют дефицитность используемых ресурсов и показывают, насколько возрастает максимальное значение целевой функции прямой задачи при увеличении количества соответствующего ресурса на единицу.
Проверим критерий оптимальности полученного решения. Если существуют такие допустимые решения X и Y прямой и двойственной задач, для которых выполняется равенство целевых функций F(x) = Z(y), то эти решения X и Y являются оптимальными решениями прямой и двойственной задач соответственно.
Связь прямой и двойственной задач состоит, в частности, в том, что решение одной из них может быть получено непосредственно из решения другой.
Двойственные оценки обладают тем свойством, что они гарантируют рентабельность оптимального плана, т.е. равенство общей оценки продукции и ресурсов, и обуславливают убыточность всякого другого плана, отличного от оптимального. В данном примере двойственная оценка (теневая или альтернативная) y1 больше всех, что означает ценность ресурса №1.
Пример №2 . Для выполнения задания необходимо, чтобы одновременно взлетели 50 АК I-го вида, 30 АК 2-го вида и 45 АК 3-го вида. АК расположены на аэродромах I и II. В таблице представлено среднее время взлета (в секундах) с соответствующего аэродрома одного АК данного типа.
| Номер аэродрома | Тип АК | ||
| 1 | 2 | 3 | |
| I | 4 | 10 | 10 |
| II | 6 | 8 | 20 |
Как следует разместить АК по аэродромам, чтобы время последовательного взлета всего наряда АК было минимальным? До какой степени можно изменить время взлета каждого АК, чтобы при этом оптимальное решение осталось прежним.
Решение. Обозначим через:
x11 – АК 1-го типа на первом аэродроме,
x12 – АК 1-го типа на втором аэродроме,
x21 – АК 2-го типа на первом аэродроме,
x22 – АК 2-го типа на втором аэродроме,
x31 – АК 3-го типа на первом аэродроме,
x32 – АК 3-го типа на втором аэродроме,
После найденного решения, ответом на первый вопрос будут значения переменных x11, x12, x21, x22, x31,x32. Информация об ответе на второй вопрос будет расположена в разделе Интервалы устойчивости коэффициентов целевой функции .
- Двойственная задача линейного программирования. Онлайн калькулятор
- Предупреждение
- Запись
- 1. Построение двойственной задачи к исходной задаче линейного программирования
- 2. Теория двойственности в задачах линейного программирования
- 3. Двойственные к разным формам задач линейного программирования
- 4.Условие дополняющей нежесткости
- Двойственная задача линейного программирования
- Теорема двойственности
Двойственная задача линейного программирования. Онлайн калькулятор
С помощю этого онлайн калькулятора можно построить двойственную задачу линейного программирования (ЛП) по отношению к исходной задаче. Для построения двойственной задачи, введите данные исходной задачи и нажмите на кнопку «Вычислить». Теоретическую часть и численные примеры смотрите ниже.
Предупреждение
Запись
- Содержание
- 1. Построение двойственной задачи к исходной задаче линейного программирования
- 2. Теория двойственности в задачах линейного программирования
- 3. Двойственные к разным формам задач линейного программирования
- 4. Условие дополняющей нежесткости
1. Построение двойственной задачи к исходной задаче линейного программирования
Пусть задана прямая задача линейного программирования (ЛП) в общем виде:
 | (1a) |
 | (1b) |
 | (1c) |
 | (1d) |
 | (1e) |
Задаче (1) соответствует следующая двойственная задача ЛП:
 | (2a) |
 | (2b) |
 | (2c) |
 | (2d) |
 | (2e) |
В этих задачах знак ∀ — определяет, что на данную переменную не налагается ограничение в виде неотрицательности, т.е. она произвольная.
Отметим, что если задача ЛП (2) является двойственной к задаче ЛП (1), то задача ЛП (1) является двойственной к задаче ЛП (2). Говорят, что задачи ЛП (1) и (2) взаимно двойственные задачи линейного программирования.
Рассмотрим подробно процесс построения двойственной задачи к исходной задачи линейного программирования. Для построения двойственной задачи:
1. Упорядочивается запись исходной задачи ЛП: если целевая функция исследуется на максимум, то ограничения (1b), (1c) должны иметь знак или «=», или «≤», а если целевая функция исследуется на минимум, то ограничения (1b), (1c) должны иметь знак или «=» , или «≥». Если в исходной задаче ЛП есть ограничения, не удовлетворяющие этим условиям, то это можно исправить, умножая данное ограничение на −1.
2. Каждому ограничению исходной задачи ставится в соответствие переменная  . Число переменных двойственной задачи равно числу ограничений исходной задачи, а число ограничений двойственной задачи равно числу переменных исходной задачи.
. Число переменных двойственной задачи равно числу ограничений исходной задачи, а число ограничений двойственной задачи равно числу переменных исходной задачи.
3. Если в исходной задаче целевая функция исследуется на максимум, то целевая функция двойственной задачи исследуется на минимум.
4. Свободные члены исходной задачи становятся коэффициентами целевой функции двойственной задачи.
5. Коэффициенты целевой функции исходной задачи становятся свободными членами двойственной задачи.
6. Матрица коэффициентов двойственной задачи получается транспонированием матрицы коэффициентов исходной задачи.
7. Если на переменную  наложено ограничение в виде неотрицательности, то j-е ограничение двойственной задачи записывается в виде неравенства. Если же переменная
наложено ограничение в виде неотрицательности, то j-е ограничение двойственной задачи записывается в виде неравенства. Если же переменная  исходной задачи произвольная, то j-е ограничение двойственной задачи имеет знак равенства.
исходной задачи произвольная, то j-е ограничение двойственной задачи имеет знак равенства.
8. Если в исходой задаче имеются ограничения в виде равенств, то на соответствующие переменные двойственной задачи не налагаются условия неотрицательности.
Чтобы посмотреть пример построения двойственной задачи воспользуйтесь онлайн калькулятором в начале страницы. Для этого введите коэффициенты исходной задачи в ячейки калькулятора и нажмите на кнопку «Построить».
2. Теория двойственности в задачах линейного программирования
Утверждение 1. Если X и Y − допустимые точки задач (1) и (2), соответственно, то
 . . | (3) |
При этом, если для каких то допустимых точек  и
и  выполнено равенство
выполнено равенство  , то и являются решениями задач (1) и (2) соответственно.
, то и являются решениями задач (1) и (2) соответственно.
Доказательство. Запишем взвимно двойственные задачи (1) и (2) в матричном виде.
 | (4a) |
 | (4b) |
 | (4c) |
 | (4d) |
где  ,
, ,
, ,
, ,
, ,
, ,
,
 |
матрица коэффициентов ограничений исходной задачи, которая разделена на четыре матрицы следующих порядков:  ,
, ,
, ,
, .
.
Сделаны также следующие обозначения:
 , ,  , ,  |
 | (5a) |
 | (5b) |
 | (5c) |
 | (5d) |
где  ,
,  ,
,  .
.
  |
    | (6) |
(5b) и (5c) можно записать так:
 , ,  | (7) |
Легко показать, что
 | (8) |
  | (9) |
Множители в правой части выражения (9) неотрицательны. Тогда их произведение не отрицательно, т.е. выполнено условие (8).
Учитывая (7) и (8) упростим выражение 6:
 | (9) |
С другой стороны:
  | (10) |
     | (11) |
(4b) и (4c) можно записать так
  | (12) |
Учитывая (12) и Y1 упростим выражение (11):
 | (13) |
Из (9) и (13) получим:
 | (14) |
т.е. выполнено условие (3).
Докажем вторую часть утверждения 1. Для любой допустимой точки x задачи (1) в том числе  . Тогда
. Тогда
 |
Поэтому  наибольшее значение целевой функции задачи (1).
наибольшее значение целевой функции задачи (1).
С другой стороны для любой допустимой точки y задачи (2)
 |
т.е.  − наименьшее из значений целевой функции задачи (2). Таким образом получили, что является решением задачи (1), а является решением задачи (2).
− наименьшее из значений целевой функции задачи (2). Таким образом получили, что является решением задачи (1), а является решением задачи (2).
Теорема 1 (первая теорема двойственности). Если исходная задача имеет решение , то двойственная ей задача также имеет решение , и
| . |
Если в исходной задаче целевая функция неограничена, то в двойственной задаче допустимая область пуста.
Отметим, что обратное утверждение неверно. Из несовместности системы системы ограничений одной из задач не следует неограниченность целевой функции для другой. В этом случае системы ограничений обеих задач могут быть несовместными. Приведем пример.
  |
Представленные задачи взаимно двойственные, и в этих задачах допустимые области пусты.
Теорема 2 (вторая теорема двойственности или условие дополняющей нежесткости). Планы  и
и  пары двойственных задач (1) и (2) являются решениями этих задач тогда и только тогда, когда выполняются следующие условия:
пары двойственных задач (1) и (2) являются решениями этих задач тогда и только тогда, когда выполняются следующие условия:
 | (15) |
 , , | (16) |
или выполняется условие:
| . | (17) |
Докажем эквивалентность условий (15) и (16) с условием (17).
Из (4с) и (5с) имеем:
 , ,  . . | (18) |
 , , | (19) |
 . . | (20) |
Из (15) и (16) имеем:
  . . | (21) |
  , , | (22) |
Подставляя (19),(20) в (21),(22) соответственно и упрощая получим:
  , , | (23) |
  , , | (24) |
Выразив, например,  через остальные слагаемые из (23) и подставляя в (24) получим:
через остальные слагаемые из (23) и подставляя в (24) получим:
 |
 . . | (25) |
А Запись (25) − это другой вид записи равенства (17).
3. Двойственные к разным формам задач линейного программирования
В статье Формы записи задачи линейного программирования мы рассмотрели различные формы записи задачи линейного программирования. В этом параграфе мы рассмотрим двойственные задачи к задачам ЛП в различных формах.
1) Двойственной к задаче ЛП в канонической форме
  , ,  |
 |
является задача ЛП в основной форме
   |
2) Двойственной к задаче ЛП в основной форме
   |
является задача ЛП в канонической форме
   |
 |
3) Двойственной к задаче ЛП в стандантной форме
   |
 |
является задача ЛП также в стандартной форме
   |
 |
Все эти три пары взаимно двойственных задач получаются из пары двойственных задач в общем виде (1) и (2) при различных значениях n1 и m1. Первая пара задач получается из (1) и (2) при m1=0, n1=n. Вторая пара задач получается из задач (1) и (2) при m1=m, n1=0. Третья пара задач получается из (1) и (2) при m1=m, n1=n.
Иногда более удобно рассматривать задачи ЛП в векторно-матричной форме. Высше представленные пары двойственных задач представим в векторно-матричной форме записи.
1) Двойственной к задаче ЛП в канонической форме
 |
является задача ЛП в основной форме
 . . |
2) Двойственной к задаче ЛП в основной форме
 |
является задача ЛП в канонической форме
 . . |
3) Двойственной к задаче ЛП в стандантной форме
 . . |
является задача ЛП также в стандартной форме
 . . |
где  векторы строки порядка
векторы строки порядка  и
и  соответственно,
соответственно,  векторы-столбцы порядка
векторы-столбцы порядка  и
и  соответственно,
соответственно,  − матрица порядка
− матрица порядка  .
.
4.Условие дополняющей нежесткости
Равенства (15) и (16) называются условиями дополняющей нежесткости. Рассмотрим уравнение (16). Левая часть уравнения является скалярным произведением неотрицательных векторов  и
и  , а это означает, что если один из координат одного из этих векторов больше нуля, то соответствующая координата другого вектора равна нулю (поскольку их скалярное произведение равно нулю). Получается, что если в системе линейных неравенств (4b) некоторое неравенство в точке
, а это означает, что если один из координат одного из этих векторов больше нуля, то соответствующая координата другого вектора равна нулю (поскольку их скалярное произведение равно нулю). Получается, что если в системе линейных неравенств (4b) некоторое неравенство в точке  не удовлетворяется как равенство, то соответствующая координата вектора равна нулю и обратно − если некоторая координата вектора больше нуля, то соответствующее неравенство в системе (4b) в точке удовлетворяется как равенство.
не удовлетворяется как равенство, то соответствующая координата вектора равна нулю и обратно − если некоторая координата вектора больше нуля, то соответствующее неравенство в системе (4b) в точке удовлетворяется как равенство.
Аналогичные рассуждения можно привести и для равенства (15). Условие дополняющей нежесткости позволяет найти оптимальный план двойственной задачи, если известен оптимальный план исходной задачи. Рассмотрим это на примере пар двойственных задач ЛП записанных в стандартной форме.
Пример 1. Дана следующая задача ЛП:
 | (26a) |
 | (26b) |
 | (26c) |
 | (26d) |
Решить данную задачу. Построить двойственную задачу и найти ее решение используя решение исходной задачи.
Запишем задачу ЛП в матричном виде:
 |
 , ,  , ,  , ,  . . |
Поскольку задача с двумя переменными, то ее можно решить графически.
 |
Как видно из рисунка, область определения – это желтая область . Вектор целевой функции c=. Для нахождения оптимального плана нужно прямую, перпендикулярную вектору С перемешать по направлению вектора С , до предельного положения соприкосающаяся с областью определения (точка M). Таким образом точка M является оптимальным решением задачи линейного программирования. Как видно из рисунка, точка M находится на пересечении следующих прямых:
 | (27) |
Решая систему линейных уравнений (27) получим координаты точки M, т.е. оптимальный план задачи ЛП (26):
 | (28) |
или в векторном виде:
 | (29) |
Целевая функция в этой точке равна:
 |
Построим двойственную к (26) задачу ЛП:
 | (30a) |
 | (30b) |
 | (30c) |
 | (30d) |
В векторно матричном виде задача ЛП (30) будет выглядеть так:
 |
  |
 |
Условие дополняющей нежесткости (15) и (16) в случае задач ЛП в стандартной форме примут вид:
 , , | (31) |
 . . | (32) |
Условие (32) позволяет найти оптимальный план двойственной задачи ЛП (30). Поскольку все координаты оптимального плана исходной задачи положительны, то из равенства (32) следует, что неравенства (30b) и (30c) в оптимальной точке должны выполняться как равенства, т.е. надо решить систему линейных уравнений
 |
Решив данное уравнение находим оптимальный план
 . . |
Найдем значение целевой функции в данной точке:
 . . |
Значение целевых функций в оптимальных точках исходной и двойственной задач равны. Следовательно получено правильное решение.
Графический метод решения задачи ЛП (30) смотрите на Рис.2:
 |
Рассмотрим пример с той же допустимой областью, что и пример 1, но с другой целевой функцией.
Пример 2. Дана следующая задача ЛП:
 | (33a) |
| (33b) |
| (33c) |
| (33d) |
Решить данную задачу. Построить двойственную задачу и найти ее решение используя решение исходной задачи и условия дополняющей нежесткости.
Запишем задачу ЛП в матричном виде:
|
, ,  , . , . |
Поскольку задача с двумя переменными, то ее можно решить графически.
 |
Из Рис.3 видно, что оптимальным является точка
 |
Целевая функция в этой точке равна:
 |
Построим двойственную задачу:
 | (34a) |
 | (34b) |
 | (34c) |
 | (34d) |
В оптимальной точке ограничение (33b) удовлетворяется как строгое неравенство следовательно исходя из условия дополняющей нежесткости (31), первая координата вектора должна быть равна нулю:  . Из равенства (32) следует, что неравенство (34b) в оптимальной точке должно выполняться как равенство, поскольку соответствующая координата опттимального плана исходной задачи больше нуля. Таким образом имеем систему линейных уравнений:
. Из равенства (32) следует, что неравенство (34b) в оптимальной точке должно выполняться как равенство, поскольку соответствующая координата опттимального плана исходной задачи больше нуля. Таким образом имеем систему линейных уравнений:
|
 |
Откуда получим  .
.
В векторном виде оптимальный план двойственной задачи имеет вид:
 . . |
Найдем значение целевой функции в данной точке:
 . . |
Значение целевых функций в оптимальных точках исходной и двойственной задач равны. Следовательно получено правильное решение.
 |
Графический метод решения задачи ЛП (34) представлен на Рис.4. Прямая, ортогональная к вектору целевой функции B перемещаем перпендикулярно к вектору целевой функции до соприкосновения к допустимой области задачи ЛП (желтая область). Полученная точка M является решением задачи ЛП.
Двойственная задача линейного программирования
Двойственная задача линейного программирования
Обычно с задачей линейного программирования (ЗЛП) связана другая линейная задача, называемая двойственной. Обе эти задачи можно считать двойственными одну по отношению к другой, считать равносильными. Первая задача называется обычно исходной, или прямой, другая — обратной. Переменные, используемые в двойственной задаче называются двойственными или множителями Лагранжа. На них не накладывается ограничений по знаку. Рассматриваются двойственные критерии оптимальности. Специальные случаи называют симметричными двойственными задачами линейного программирования. Связь между оптимальными решениями двойственных задач устанавливается теоремой двойственности.
Теорема двойственности
Важнейшие свойства пары двойственных задач математического программирования сформулированы в трех основных теоремах.
Теорема двойственности
Допустимый вектор решения прямой задачи программирования оптимален тогда и только тогда, когда существует такой допустимый вектор решения двойственной задачи, что целевые функции прямой и двойственной задачи равны. Допустимый вектор двойственной задачи оптимален тогда и только тогда, когда существует допустимый вектор прямой задачи и целевые функции обеих задач равны.
Теорема существования решения
Если существуют допустимые векторы решений прямой и двойственной задач, то обе задачи имеют оптимальные векторы. Если одна из двух задач не имеет допустимого вектора, то ни одна из них не имеет оптимального вектора решения.
Теорема (принцип) дополняющей нежесткости
Если (xQ , xL) – оптимальное решение прямой задачи, а (yQ, yL) – решение двойственной задачи, то (xQ , xL, yQ , yL) – решение задачи Лагранжа. В частности, в этом случае удовлетворяются соотношения между переменными прямой и двойственной задач и условия дополняющей нежесткости.
Оптимальное решение прямой задачи программирования получается только при одном значении xQ. Это справедливо и для переменной yQ в двойственной задаче.
Теоремы двойственности
Основное неравенство двойственности. Для любых допустимых решений Х и Y пары двойственных ЗЛП имеет место неравенство

Экономически это означает, что для любого допустимого плана производства и любого дополнительного вектора оценок ресурсов (на складе) стоимость изготовленного продукта не превосходит оценки ресурсов.
Теорема существования (малая тероема двойственности)
Чтобы прямая и двойственная задачи имели opt решения, необходимо и достаточно, чтобы существовали допустимые решения для каждой из них.
Теорема 1 двойственности.
Если одна из пары двойственных задач имеет opt решение, то и другая его имеет. Причем экспериментальные решения их целевых ф. равны; если же ЦФ одной из задач не ограничена, то система ограничений другой противоречива. Интерпретация: оптимальное использование ресурсов – opt план. Суммарная оценка ресурсов = оценке продукта полученного при opt плане. Любой другой план не рентабелен. Cj – стоимость единицы продукции (внешняя оценка) yi – стоимость единицы ресурса (внутренняя оценка). Эти двойственные оценки выступают как инструменты балансирования затрат и результатов. Имеет место xj ym +j ; xn+i yi.
Теорема 2 двойственности (о дополняющей нежесткости)
Для того, чтобы допустимые решения X и Y пары двойственных задач были оптимальными, необходимо и достаточно выполнить условия:

То есть, если какое-либо ограничение одной ЗЛП обращается ее opt планом в строгое равенство, то соответствующая переменная двойственной задачи в ее opt плане равна нулю; если же какая-либо переменная opt-го решения одной ЗЛП положительна, то соответствующее ограничение в двойственной ЗЛП ее opt планом обращается в точное равенство.
Теорема Кёнига хорошо иллюстрирует использование принципа двойственности ЗЛП.
Формулирование теоремы. Максимальное число попарно неколлинеарных единиц любой булевой матрицы равно минимальному числу линий, покрывающих все единицы матрицы.
Доказательство. Для нахождения максимального числа попарно неколлинеарных единиц булевой матрицы достаточно сформулировать и решить линейную задачу:

Минимальное число линий, покрывающих все единицы матрицы [Cij], найдем, решив линейную задачу:

Оптимальному решению (u*i, v*j) последней задачи отвечает минимальное покрытие, состоящее из множества строк I, для которых u*i = 1 и столбцов J, для которых u*j =1.
Матрицы А и А Т коэффициентов (*), (**), (***) являются абсолютно унимодулярными, как матрицы двудольного графа. Поэтому условия целочисленности переменных заменяем на условие их неотрицательности, и тогда получаем пару двойственных задач линейного программирования и согласно теореме двойственности имеем:

Линией матрицы называется ее строка или столбец. Два элемента матрицы называются неколлинеарными, если они не лежат на одной линии.
Матрица называется абсолютно унимодулярной, если все ее ненулевые миноры равны 1, либо -1.
Следствие. Матрица инциденций неориентированного графа G абсолютно унимодулярна тогда и только тогда, когда G – двудольный граф. В двудольном графе все простые циклы имеют четкую длину
Принцип двойственности в задачах линейного программирования.
Предположим, что руководство предприятия из анализа конъюнктуры рынка продукции приняли решение: производство сократить, а от запасов сырья избавиться, (продать на рынке) и при этом не нанести себе убытков.
С этой целью руководство должно назначить стоимости yi за единицу сырья вида Si, стремясь при этом минимизировать общую стоимость сырья (чтобы быстрее продать сырье): Ф = Σ 4 i=1 biyi
Выручка предприятия от продажи сырья, расходуемого на единицу продукции Пi, составит: Σ 4 i=1 aij yi
И по условию она не должна быть меньше Сj (в противном случае предприятию выгоднее не продавать сырье, а использовать его для нужд производства, выпуска продукции).
Сформулируем исходную и двойственную задачи:
Обе задачи по отношению друг к другу называются двойственными или сопряженными. Анализ таблицы позволяет сделать выводы:
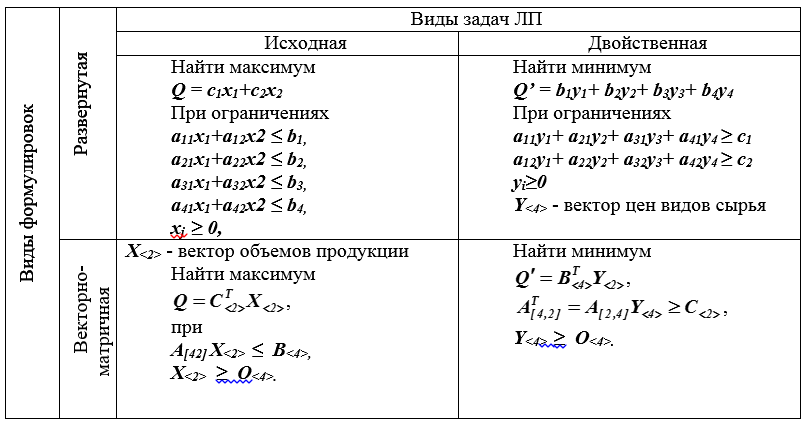
Если первая задача сформулирована на поиск максимума, то вторая формулируется на поиск минимума линейной функции.
Коэффициенты ЦФ первой задачи являются свободными членами системы ограничений второй.
Свободные члены системы ограничений первой задачи являются коэффициентами линейной системы во второй задаче.
Матрица коэффициентов второй задачи является транспонированной к матрице коэффициентов ограничений первой задачи.
Знаки неравенств в ограничениях второй задачи противоположны знакам неравенств в ограничениях первой задачи.
Оптимальный план X opt одной из задач тесно связан с оптимальным планом Y opt другой. Если одна из задач имеет решение, то другая также разрешена, причем для оптимальных клонов X opt = и Y opt = справедливо равенство Q( X opt ) =Q’( Y opt ). Если линейная форма одной из задач неограниченна, то условия другой задачи несовместны. Если A -1 обратная матрица к матрице В, состоящей из векторов базиса оптимального плана исходной задачи, то оптимальный план двойственной задачи равен Y opt =СВ -1 , здесь С – вектор базисных переменных. Решение двойственной задачи получается в последней симплексной таблице исходной задачи, в (m+1) строке, в столбцах, соответствующих дополнительным параметрам.
Для того чтобы векторы X opt = и Y opt = были решениями пары задач, необходимо и достаточно, чтобы их компоненты удовлетворяли следующим условиям:

Эти условия называют принципом дополняющей нежесткости. Если исходная (прямая) задача задана в канонической форме, то двойственная к ней называется несимметричной. Для несимметричной двойственной задачи соблюдается условие yi ≥ 0.
Теория ЗЛП доказывает, что компоненты оптимальных планов взаимно двойственных задач, приведенных к каноническому виду, соответствуют одни другим. То есть базисные переменные основной задачи соответствуют свободным переменным двойственной задачи и наоборот, j = 1(1)n, x*j y*m +j ; x*n+i y*i ; i = 1(1)m.

Размерности в табличке m и n берутся в задаче для y-ков записанной в канонической форме.
Пример. Двойственный симплекс метод.
Исходная задача. Имеется три вида продуктов Пj, причем единица веса каждого из видов продуктов содержит aij единиц (питательных веществ). Для нормальной жизнедеятельности человек должен потреблять не менее bi единиц вещества Bi в сутки. Стоимость единицы продукта Пj равняется Cj. Требуется составить оптимальный суточный рацион питания, т.е. найти количество xj продукта, которое должен потреблять человек, чтобы стоимость питания была бы минимальной, если известно, что

такие значения его компонентов xj, j = 1(1)3, которые минимизируют целевую функцию (Ц) Q = 3x1 + 2x2 + x3 и удовлетворяют ограничениям неравенствам
xj ≥ 0; j = 1(1)3 = n
Для приведения задачи к каноническому виду введем дополнительные переменные x4, x5, x6, x7, переменных стало больше чем уравнений n – m = 7 – 4 = 3, следовательно, части из них (трем любым,) для получения решения можно задать произвольные значения (задают, как правило, нулевые значения), возникает число сочетаний из n по m вариантов. Система ограничений примет вид равенств
xj ≥ 0; j = 1(1)3 = n, i = 1(1)4 = m.
Назначаем опорный план. Выбор в качестве базисных переменных x4, x5, x6, x7 приводит к недопустимому опорному плану. Так как знаки левой и правой частей различны. (Свободные переменные x1 = x2 = x3 = 0) Метод искусственного базиса приводит к увеличению числа неизвестных задач, что нежелательно. Анализ задачи показывает, что число уравнений в системе ограничений больше числа переменных. Поэтому попытаемся применить принцип двойственности, т.е. вначале решим двойственную ЗЛП, а затем найдем решение исходной.
Двойственная задача. Коэффициентами линейной формы в двойственной задаче выступают правые части bi , i = 1(1)4 = m, исходной основной задачи. Переменные получают другие имена y1, y2, y3, y4, и формулируется двойственная задача иначе. Найти максимум линейной формы Q’:
yi ≥ 0; i = 1(1)4.
Приведем задачу к каноническому виду, вводим дополнительные неотрицательные переменные y5 , y6 , y7 :
Найти минимум ЦФ (знаки у коэффициентов ЦФ поменяли на противоположные): Q’= — 0,2y1 — 0,5y2 — 0, 6y3 — 0,1y4;
при ограничениях (в ограничения добавили новые переменные):
yi ≥ 0; i = 1(1)7.
Задача решается симплекс методом. Исходный опорный план в качестве переменных может иметь y5, y6, y7 и свободные переменные y1 = y2 = y3 = y4 = 0, т.е. Y = [0, 0, 0, 0, 3, 2, 1] .

Базисные переменные y5, y6, y7 и ЦФ выражаем через свободные переменные, т.е. из свободных членов (правых частей, обозначенных γi ) вычитаем левые части ограничений
γ0 =0, так как ЦФ не содержит свободного члена.
и строим симплекс таблицу с двумя полуклетками. Направляющий столбец y3, направляющая строка y6.

Анализ таблицы показывает, что все коэффициенты ЦФ при свободных переменных положительны. Следовательно, план Y не является оптимальным, ЦФ можно уменьшить, увеличивая значения соответствующих свободных переменных.
Находим γ = max<γi> =max = 0,6. Переменную y3 надо ввести в базис. После этого устанавливаем, существует ли оптимальный план. В направляющем столбце все коэффициенты положительны, следовательно, оптимальный план существует. В базисе есть переменные, которые можно уменьшать до нуля увеличивая значения y3, тем самым минимизируя ЦФ. Раньше других в нуль обратиться переменная y6 и ее исключаем из базиса.

После замены переменных в базисе переходим к новой симплексной таблице.

Анализ этой таблицы показывает, что все коэффициенты в выражении ЦФ свободных переменных отрицательны. Следовательно, опорный план Y = [0, 0, 20/3, 0, 5/3, 0, 1/3] является оптимальным. ЦФ при этом Q’1 = — 4 достигла наименьшего значения. Возвращаемся к двойственной задаче. Используя соответствие между оптимальными планами двойственных задач ЛП, определяем: базисными переменными в оптимальном плане будут x2 x4 x5 x7; их значения с противоположным знаком записаны в последней строке таблицы. Таким образом, X opt = , т.е. оптимальный рацион из двух единиц продукта П2. Стоимость такого рациона минимальна и составляет 4 единицы. Это значение с противоположным знаком записано в той же таблице.
Ваулин А. Е. Методы цифровой обработки данных.– СПб.: ВИККИ им. А. Ф. Можайского, 1993.– 106 с.
Гэри М., Джонсон Д. Вычислительные машины и трудно решаемые задачи. М.: Мир, 1982.
Квейд Э. Методы системного анализа // Новое в теории и практике управления производством в США.–М.: Прогресс, 1971.– с.78-99. .
Корбут А.А., Финкельштейн Ю. Ю. Дискретное программирование М. Наука. Гл. ред. физ.-мат. лит. 1969.
Макаров И. М. и др. Теория выбора и принятия решений.– М.: Наука, 1982.– 328 с.
Пфанцагль И. Теория измерений. – М.: Наука, 1988.–384 с.
Таха Х. А. Введение в исследование операций. 7-е изд. М.: Изд. дом «Вильямс», 2005.
Фишберн П. С. Теория полезности для принятия решений. – М.: Наука,1978. –352 с.