Ориентация связанной СК относительно нормальной (и нормальной земной) СК (или, другими словами, угловое положение ЛА в пространстве) описывается тремя эйлеровыми углами: тангажа, крена и рыскания (рис. 1.11).

Рис. 1.11. Угловое положение ЛА относительно нормальной земной СК
Угол тангажа & — это угол между осью ОХ и местной горизонтальной плоскостью.
Угол крена у — это угол между плоскостью симметрии ЛА и местной вертикальной плоскостью, содержащей ось ОХ.
Угол рыскания ц/ — это угол между проекцией оси ОХ на горизонтальную плоскость и осью OXg
Эти три эйлеровых угла получаются следующим образом. Допустим, в какой-то момент времени оси связанной и нормальной СК совпадают. Для перевода связанной СК в новое угловое положение выполним три последовательных поворота:
- 1) поворот вокруг OYg на угол |/;
- 2) поворот вокруг промежуточного положения OZ на угол 0;
- 3) поворот вокруг ОХ на угол у.
Скоростная и нормальная СК взаимно ориентированы аналогичным образом тремя так называемыми «скоростными углами»: 0а, га, уа (0Й — скоростной угол тангажа; vj/a — скоростной угол рыскания и уа — скоростной угол крена).
Связанная и скоростная СК ориентированы между собой двумя углами: а — угол атаки и (3 — угол скольжения (рис. 1.12).
Угол атаки а — это угол между проекцией воздушной скорости Л А на плоскость OXY связанной СК и продольной осью ОХ. Угол а положителен, если проекция воздушной скорости на нормальную ось OY отрицательна. Угол скольжения (3 — это угол между вектором воздушной скорости ЛА и плоскостью симметрии ЛА. Угол |3 положителен, если проекция воздушной скорости на поперечную ось OZ положительна.
Согласно определению углов атаки и скольжения получим проекции воздушной скорости на оси связанной системы координат (рис. 1.12):

Траекторная и скоростная СК связаны скоростным углом крена — У а (рис. 1.13).
Траекторная и нормальная СК связаны между собой двумя углами — 0 (угол наклона траектории) и |/ (угол пути) (рис. 1.13). Проекции вектора угловой скорости вращения траекторной СК (сок) относительно нормальной на оси траекторной СК (рис. 1.14) определятся в виде

Рис. 1.12. Ориентация связанной и скоростной систем координат

Рис. 1.13. Ориентация траекторией, скоростной и нормальной систем координат

Здесь vj/, 0 — производные по времени от угла пути и угла наклона траектории, соответственно.

Рис. 1.14. К определению составляющих вектора угловой скорости
Частный случай — полет в вертикальной плоскости без крена и скольжения
В этом случае (3 = 0, у = 0. Тогда связь между углом атаки а, углом тангажа & и углом наклона траектории 0 (рис. 1.15) будет иметь вид
а+ 0 = 0 или а = 0-0.

Рис. 1.15. Полет ЛА в вертикальной плоскости Угол тангажа равен сумме углов атаки и наклона траектории.
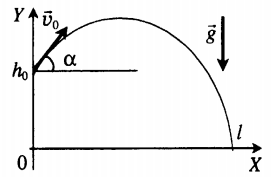
Движение тела, брошенного под углом к горизонту
теория по физике 🧲 кинематика
Когда тело бросают вверх под углом к горизонту, оно сначала равнозамедленно поднимается, а затем равноускорено падает. При этом оно перемещается относительно земли с постоянной скоростью.
Важные факты! График движения тела, брошенного под углом к горизонту:
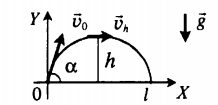
α — угол, под которым было брошено тело
- Вектор скорости тела, брошенного под углом к горизонту, направлен по касательной к траектории его движения.
- Так как начальная скорость направлена не вдоль горизонтальной линии, обе ее проекции отличны от нуля. Проекция начальной скорости на ось ОХ равна v0x = v0cosα. Ее проекция на ось ОУ равна v0y = v0sinα.
- Проекция мгновенной скорости на ось ОХ равна: vx = v0 cosα. Ее проекция на ось ОУ равна нулю: vy = v0 sinα – gt.
- Проекция ускорения свободного падения на ось ОХ равна нулю: gx = 0. Ее проекция на ось ОУ равна –g: gy = –g.
Кинематические характеристики
Модуль мгновенной скорости в момент времени t можно вычислить по теореме Пифагора:
Минимальной скорости тело достигает в верхней точке траектории. Она выражается формулой:
Максимальной скоростью тело обладает в момент начала движения и в момент падения на землю. Начальная и конечная скорости движения тела равны:
Время подъема — время, которое требуется телу, чтобы достигнуть верхней точки траектории. В этой точке проекция скорости на ось ОУ равна нулю: vy = 0. Время подъема определяется следующей формулой:
Полное время — это время всего полета тела от момента бросания до момента приземления. Так как время падения равно времени подъема, формула для определения полного времени полета принимает
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
Дальность полета — перемещение тела относительно ОХ. Обозначается буквой l. Так как относительно ОХ тело движется с постоянной скоростью, для вычисления дальности полета можно использовать формулу перемещения при равномерном прямолинейном движении:
Подставляя в выражение формулу полного времени полета, получаем:

Горизонтальное смещение тела — смещение тела вдоль оси ОХ. Вычислить горизонтальное смещение тела в любой момент времени t можно по формуле координаты x:
Учитывая, что x0 = 0, и проекция ускорения свободного падения на ось ОХ тоже равна нулю, а проекция начальной скорости на эту ось равна v0 cosα, данная формула принимает вид:
Мгновенная высота — высота, на которой находится тело в выбранный момент времени t. Она вычисляется по формуле координаты y:
Учитывая, что начальная координата равна 0, проекция начальной скорости на ось ОУ равна v0 sinα, а проекция ускорения свободного падения на эту ось равна –g, эта формула принимает вид:
Наибольшая высота подъема — расстояние от земли до верхней точки траектории. Наибольшая высота подъема обозначается h и вычисляется по формуле:
Пример №1. Небольшой камень бросили с ровной горизонтальной поверхности под углом к горизонту. На какую максимальную высоту поднялся камень, если ровно через 1 с после броска его скорость была направлена горизонтально?
Скорость направляется горизонтально в верхней точке полета. Значит, время подъема равно 1 с. Из формулы времени подъема выразим произведение начальной скорости на синус угла, под которым было брошено тело:
Подставим полученное выражение в формулу для определения наибольшей высоты подъема и сделаем вычисления:

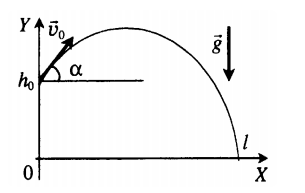
Тело, брошенное под углом к горизонту с некоторой высоты
Когда тело бросают под углом к горизонту с некоторой высоты, характер его движения остается прежним. Но приземлится оно дальше по сравнению со случаем, если бы тело бросали с ровной поверхности.
График движения тела, брошенного под углом к горизонту с некоторой высоты:
Время падения тела больше времени его подъема: tпад > tпод.
Полное время полета равно:
Уравнение координаты x:
Уравнение координаты y:
Пример №2. С балкона бросили мяч под углом 60 градусов к горизонту, придав ему начальную скорость 2 м/с. До приземления мяч летел 3 с. Определить дальность полета мяча.
Косинус 60 градусов равен 0,5. Подставляем известные данные в формулу:
x = v0 cosα t = 2 ∙ 0,5 ∙ 3 = 3 м.
Алгоритм решения
Решение
Запишем исходные данные:
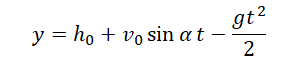
Построим чертеж и укажем на нем все необходимое:
Нулевой уровень — точка D.
Закон сохранения энергии:
Потенциальная энергия шарика в точке А равна:
Кинетическая энергия шарика в точке А равна нулю, так как скорость в начале свободного падения нулевая.
В момент перед упругим ударом с плитой в точке В потенциальная энергия шарика минимальна. Она равна:
Перед ударом кинетическая энергия шарика равна:
Согласно закону сохранения энергии:
E p A = E p B + E k B
m g H = m g l 1 + m v 2 2 . .
Отсюда высота H равна:
H = m g l 1 m g . . + m v 2 2 m g . . = l 1 + v 2 2 g . .
Относительно точки В шарик поднимется на высоту h – l1. Но данный участок движения можно рассматривать как движение тела, брошенного под углом к горизонту. В таком случае высота полета определяется формулой:
h − l 1 = v 2 sin 2 . β 2 g . . = v 2 sin 2 . ( 90 − 2 α ) o 2 g . .
l 1 = h − v 2 sin 2 . ( 90 − 2 α ) o 2 g . .
Шарик падал в течение времени t, поэтому мы можем рассчитать высоту шарика над плитой и его скорость в точке В:
H = l 1 + v 2 2 g . . = h − ( g t ) 2 sin 2 . ( 90 − 2 α ) o 2 g . . + ( g t ) 2 2 g . .
H = h − g t 2 sin 2 . ( 90 − 2 α ) 2 . . + g t 2 2 . . = h − g t 2 2 . . ( sin 2 . ( 90 − 2 α ) o − 1 )
H = 1 , 4 − 10 · 0 , 4 2 2 . . ( sin 2 . ( 90 − 6 0 ) o − 1 )
H = 1 , 4 − 5 · 0 , 16 ( sin 2 . 3 0 o − 1 )
H = 1 , 4 − 0 , 8 ( ( 1 2 . . ) 2 − 1 ) = 1 , 4 − 0 , 8 ( 1 4 . . − 1 )
H = 1 , 4 + 0 , 6 = 2 ( м )
pазбирался: Алиса Никитина | обсудить разбор | оценить
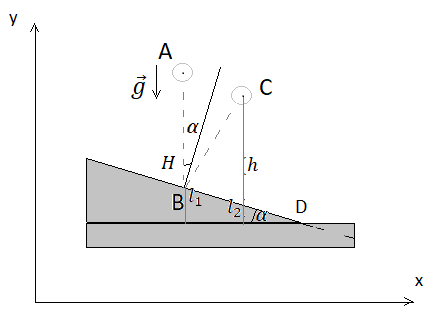
В момент t=0 мячик бросают с начальной скоростью v0 под углом α к горизонту с балкона высотой h (см. рисунок).
Графики А и Б представляют собой зависимости физических величин, характеризующих движение мячика в процессе полёта, от времени t. Установите соответствие между графиками и физическими величинами, зависимости которых от времени эти графики могут представлять. (Сопротивлением воздуха пренебречь. Потенциальная энергия мячика отсчитывается от уровня y=0).
К каждой позиции графика подберите соответствующую позицию утверждения и запишите выбранные цифры в порядке АБ.
Алгоритм решения
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
Решение
Исходя из условия задачи, мячик движется неравномерно. Этот случай соответствует движению тела, брошенного под углом к горизонту.
Записываем формулы для физических величин из таблицы, учитывая, что речь идет о движении тела, брошенного под углом к горизонту.
Координата x меняется согласно уравнению координаты x:
Так как начальная координата нулевая, а проекция ускорения свободного падения тоже равна нулю, это уравнение принимает вид:
Проекция скорости мячика на ось ОХ равна произведению начальной скорости на время и косинус угла, под которым мячик был брошен. Поэтому уравнение координаты x принимает вид:
В этом уравнении начальная скорость и угол α — постоянные величины. Меняется только время. И оно может только расти. Поэтому и координата x может только расти. В этом случае ей может соответствовать график, представляющий собой прямую линии, не параллельную оси времени. Но графики А и Б не могут описывать изменение этой координаты.
Формула проекции скорости мячика на ось ОХ:
Начальная скорость и угол α — постоянные величины. И больше ни от чего проекция скорости на ось ОХ не зависит. Поэтому ее может охарактеризовать график в виде прямой линии, параллельной оси времени. Такой график у нас есть — это Б.
Кинетическая энергия мячика равна половине произведения массы мячика на квадрат его мгновенной скорости. По мере приближения к верхней точке полета скорость тела уменьшается, а затем растет. Поэтому кинетическая энергия также сначала уменьшается, а затем растет. Но на графике А величина наоборот — сначала увеличивается, потом уменьшается. Поэтому он не может быть графиком зависимости кинетической энергии мячика от времени.
Остается последний вариант — координата y. Уравнение этой координаты имеет вид:
Это квадратическая зависимость, поэтому графиком зависимости координаты y от времени может быть только парабола. Так как мячик сначала движется вверх, а потом — вниз, то и график должен сначала расти, а затем — убывать. График А полностью соответствует этому описанию.
Теперь записываем установленные соответствия в порядке АБ: 42.
pазбирался: Алиса Никитина | обсудить разбор | оценить
Мальчик бросил стальной шарик вверх под углом к горизонту. Пренебрегая сопротивлением воздуха, определите, как меняются по мере приближения к Земле модуль ускорения шарика и горизонтальная составляющая его скорости?
Для каждой величины определите соответствующий характер изменения:
- увеличивается
- уменьшается
- не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.

Алгоритм решения
- Сделать чертеж, иллюстрирующий ситуацию.
- Записать формулы, определяющие указанные в условии задачи величины.
- Определить характер изменения физических величин, опираясь на сделанный чертеж и формулы.
Решение
Модуль ускорения шарика |g| — величина постоянная, так как ускорение свободного падения не меняет ни направления, ни модуля. Поэтому модуль ускорения не меняется (выбор «3»).
Горизонтальная составляющая скорости шарика определяется формулой:
Угол, под которым было брошено тело, поменяться не может. Начальная скорость броска тоже. Больше ни от каких величин горизонтальная составляющая скорости не зависит. Поэтому проекция скорости на ось ОХ тоже не меняется (выбор «3»).
Ответом будет следующая последовательность цифр — 33.
pазбирался: Алиса Никитина | обсудить разбор | оценить
Системы координат
При аэродинамических расчетах и изучении динамики движения самолетов используются различные системы координат. Чаще всего используются связанная, скоростная, нормальная и траекторная системы координат.
Связанная система координат 0XYZ жестко связана с самолетом (отсюда ее название). Начало этой системы совпадает с центром масс самолета (см. рис. 18). Ось 0X лежит в базовой плоскости самолета, она направлена в сторону носовой части и, как правило, параллельна САХ. Эта ось называется продольной осью. Ось 0Y тоже лежит в базовой плоскости самолета, при этом она перпендикулярна оси 0X и направлена к верхней части самолета. Она называется нормальной осью. Ось 0Z перпендикулярна базовой плоскости самолета и направлена в сторону правого полукрыла. Эта ось называется поперечной осью.
Рис. 18. Связанная система координат
Скоростная система координат 0XaYaZa связана с вектором скорости движения центра масс самолета относительно воздушной среды  (см. рис. 19), ее начало также помещают в центре масс самолета. Ось 0Xa в скоростной системе координат всегда совпадает с вектором скорости и называется скоростной осью. Ось 0Ya перпендикулярна вектору скорости, лежит в базовой плоскости самолета и направлена к верхней части самолета. Она называется осью подъемной силы. Ось 0Za проводят так, чтобы она дополняла оси 0Xa и 0Ya до правой системы координат. Эта ось называется боковой осью.
(см. рис. 19), ее начало также помещают в центре масс самолета. Ось 0Xa в скоростной системе координат всегда совпадает с вектором скорости и называется скоростной осью. Ось 0Ya перпендикулярна вектору скорости, лежит в базовой плоскости самолета и направлена к верхней части самолета. Она называется осью подъемной силы. Ось 0Za проводят так, чтобы она дополняла оси 0Xa и 0Ya до правой системы координат. Эта ось называется боковой осью.
Рис. 19. Скоростная система координат
Для описания взаимного положения осей связанной и скоростной систем координат используются угол атаки и угол скольжения. Углом атаки a называется угол между осью 0X связанной системы координат и проекцией вектора скорости на базовую плоскость самолета –  . Углом скольжения b называется угол между вектором скорости и базовой плоскостью самолета. Легко заметить, что если скольжение отсутствует (b = 0), то определение угла атаки упрощается: угол a будет равен углу между продольной осью 0X и вектором скорости .
. Углом скольжения b называется угол между вектором скорости и базовой плоскостью самолета. Легко заметить, что если скольжение отсутствует (b = 0), то определение угла атаки упрощается: угол a будет равен углу между продольной осью 0X и вектором скорости .
Нормальная система координат 0XgYgZg используется для описания пространственного положения самолета относительно поверхности Земли. Начало координат этой системы совпадает с началом связанной системы координат (см. рис. 20). Ось 0Yg всегда направлена вверх по местной вертикали, а направление осей 0Xg и 0Zg выбирается в соответствии с решаемой задачей, при этом плоскость Xg0Zg всегда расположена горизонтально. Угол между осью 0Xg и проекцией оси 0X на горизонтальную плоскость XXg0Zg называется углом рыскания и обозначается y. Угол между продольной осью 0X и горизонтальной плоскостью Xg0Zg называется углом тангажа и обозначается j. Угол между поперечной осью 0Z и горизонтальной плоскостью Xg0Zg называется углом крена и обозначается g.
Рис. 20. Нормальная система координат
Траекторная система координат 0XкYкZк используется главным образом в динамике полета для описания движения самолета относительно поверхности Земли. В общем случае скорость полета относительно воздушной среды может не совпадать со скоростью полета относительно Земли, т.к. в реальной атмосфере почти всегда имеется движение воздушных масс, проще говоря, ветер. Ветер оказывает воздействие на самолет, и суммарная скорость его движения относительно поверхности Земли  (земная скорость) будет равна:
(земная скорость) будет равна:
 , (31)
, (31)
где – скорость самолета относительно воздушной среды;
 – скорость ветра относительно Земли.
– скорость ветра относительно Земли.
Траекторная система координат связана с вектором земной скорости . Начало координат этой системы совпадает с началом связанной системы координат (см. рис. 21). Ось 0Xк совпадает с направлением вектора земной скорости . Ось 0Yк размещается в вертикальной плоскости, проходящей через ось 0Xк, и направлена вверх от Земли. Ось 0Zк образует правую систему координат. Траекторная система координат может быть получена из нормальной путем поворота последней на угол пути x и угол наклона траектории q.
Рис. 21. Траекторная система координат
Углом пути x называется угол между проекцией вектора на горизонтальную плоскость Xg0Zg и осью 0Xg. Угол наклона траектории q – это угол между вектором земной скорости и местной горизонтальной плоскостью Xg0Zg.