Матрицей поворота (или матрицей направляющих косинусов) называется ортогональная матрица, которая используется для выполнения собственного ортогонального преобразования в евклидовом пространстве. При умножении любого вектора на матрицу поворота длина вектора сохраняется. Определитель матрицы поворота равен единице.
Обычно считают, что, в отличие от матрицы перехода при повороте системы координат (базиса), при умножении на матрицу поворота вектора-столбца координаты вектора преобразуются в соответствии с поворотом самого вектора (а не поворотом координатных осей; то есть при этом координаты повернутого вектора получаются в той же, неподвижной системе координат). Однако отличие той и другой матрицы лишь в знаке угла поворота, и одна может быть получена из другой заменой угла поворота на противоположный; та и другая взаимно обратны и могут быть получены друг из друга транспонированием.
Матрица поворота в трёхмерном пространстве
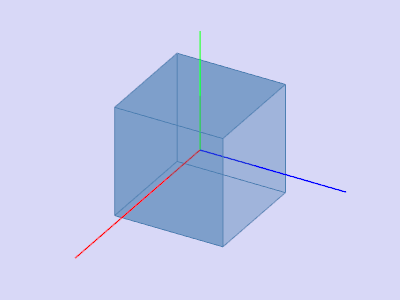
Любое вращение в трехмерном пространстве может быть представлено как композиция поворотов вокруг трех ортогональных осей (например, вокруг осей декартовых координат). Этой композиции соответствует матрица, равная произведению соответствующих трех матриц поворота.
Матрицами вращения вокруг оси декартовой системы координат на угол α в трёхмерном пространстве являются:
Вращение вокруг оси x: 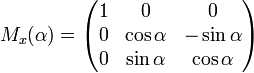
Вращение вокруг оси y: 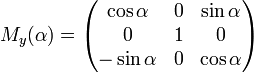
Вращение вокруг оси z: 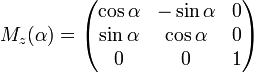
После преобразований мы получаем формулы:
По оси Х
x’=x;
y’:=y*cos(L)+z*sin(L) ;
z’:=-y*sin(L)+z*cos(L) ; 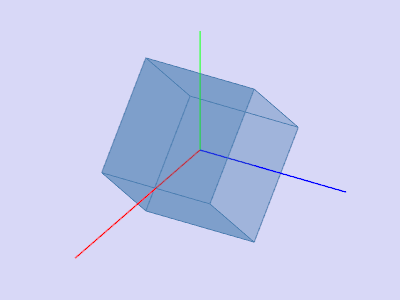
По оси Y
x’=x*cos(L)+z*sin(L);
y’=y;
z’=-x*sin(L)+z*cos(L); 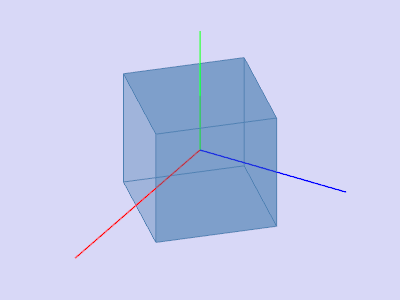
По оси Z
x’=x*cos(L)-y*sin(L);
y’=-x*sin(L)+y*cos(L);
z’=z; 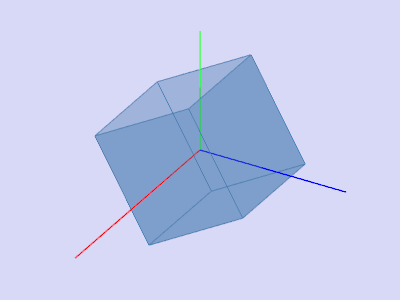
Все три поворота делаются независимо друг от друга, т.е. если надо повернуть вокруг осей Ox и Oy, вначале делается поворот вокруг оси Ox, потом применительно к полученной точки делается поворот вокруг оси Oy.
Положительным углам при этом соответствует вращение вектора против часовой стрелки в правой системе координат, и по часовой стрелке в левой системе координат, если смотреть против направления соответствующей оси. Правая система координат связана с выбором правого базиса (см. правило буравчика).
- Основы компьютерной геометрии. Написание простого 3D-рендера
- Математика
- Повороты вектора. Матрица поворота
- Поворот в трехмерном пространстве
- Проекция
- Системы координат. Базисы
- Переход в другой базис
- Системы координат со смещенным центром
- Пишем геометрический движок. Создание проволочного рендера.
- Полигональная графика
- Реализуем системы координат
- Рисование полигонов. Камера
- Отсекаем невидимые полигоны
- Переводим в экранные координаты
- Корректируем размер спроецированного изображения
- Растеризация полигонов. Наводим красоту.
- Алгоритм Брезенхема для рисования линии.
- Растеризация треугольника. Алгоритм заливки
- Отсечение невидимых точек.
- Текстуры! Нормали! Освещение! Мотор!
- Освещение
- Модель Фонга
- Фоновый свет (Ambient)
- Рассеянный свет (Diffuse)
- Зеркальный свет (Reflect)
- Играем с нормалями
- Двигаем свет
- Производительность
- Матрицы поворота, углы Эйлера и кватернионы (Rotation matrices, Euler angles and quaternions)
- Матрицы поворота и углы Эйлера
- Axis Angle представление вращения
- Кватернионы
- Основные операции над кватернионами
- Сложение, вычитание и умножение на скаляр.
- Норма и модуль
- Обратный кватернион или сопряжение ( conjugate )
- Инверсный (inverse) кватернион
- Тождественный кватернион
- Скалярное произведение
- Вращение 3d вектора
- Умножение кватернионов
- Конвертирование между кватернионом и Axis Angle представлением
- Конвертирование кватерниона в матрицу поворота
- Конвертирование матрицы поворота в кватернион
Основы компьютерной геометрии. Написание простого 3D-рендера
Привет меня зовут Давид, а вот я собственной персоной отрендеренный своим самописным рендером:

С развитием шейдерных языков и увеличением мощностей GPU все больше людей заинтересовались программированием графики. Появились новые направления, такие как например Ray marching со стремительным ростом своей популярности.
В преддверии выхода нового монстра от NVidia я решил написать свою (ламповую и олдскульную) статью про основы рендеринга на CPU. Она является отражением моего личного опыта написания рендера, и в ней я попытаюсь довести понятия и алгоритмы с которыми я столкнулся в процессе кодинга. Стоит понимать, что производительность данного софта будет весьма низкая в силу непригодности процессора для выполнения подобных задач.
Выбор языка изначально падал на c++ или rust, но я остановился на c# из-за простоты написания кода и широких возможностей для оптимизации. Итоговым продуктом данной статьи будет рендер, способный выдавать подобные картинки:
Все модели, использованные мной здесь, распространяются в открытом доступе, не занимайтесь пиратством и уважайте труд художников!
Математика
Само собой куда же писать рендеры без понимания их математических основ. В этом разделе я изложу только те концепции, которые я использовал в коде. Тем кто не уверен в своих знаниях пропускать данный раздел не советую, без понимания этих основ трудно будет понять дальнейшее изложение. Так же я рассчитываю, что тот кто решил изучать computation geometry будет иметь базовые знания в линейной алгебре, геометрии, а так же тригонометрии(углы, вектора, матрицы, скалярное произведение). Для тех кто хочет понять вычислительную геометрию глубже, могу порекомендовать книгу Е. Никулина «Компьютерная геометрия и алгоритмы машинной графики».
Повороты вектора. Матрица поворота
Поворот — это одно из основных линейных преобразований векторного пространства. Так же оно является еще и ортогональным преобразованием, так как сохраняет длины преобразованных векторов. В двумерном пространстве существует два типа поворотов:
- Поворот относительно начала координат
- Поворот относительно некоторой точки
Здесь я рассмотрю только первый тип, т.к. второй является производным от первого и отличается лишь сменой системы координат вращения (системы координат мы разберем далее).
Давайте выведем формулы для вращения вектора в двумерном пространстве. Обозначим координаты исходного вектора — . Координаты нового вектора, повернутого на угол f, обозначим как .
Мы знаем, что длина у этих векторов общая и поэтому можем использовать понятия косинуса и синуса для того, чтобы выразить эти вектора через длину и угол относительно оси OX:
Заметьте, что мы можем использовать формулы косинуса и синуса суммы для того, чтобы разложить значения x’ и y’. Для тех, кто подзабыл я напомню эти формулы:
Разложив координаты повернутого вектора через них получим:
Здесь нетрудно заметить, что множители l * cos a и l * sin a – это координаты исходного вектора: x = l * cos a, y = l * sin a. Заменим их на x и y:
Таким образом мы выразили повернутый вектор через координаты исходного вектора и угол его поворота. В виде матрицы это выражение будет выглядеть так:
Умножьте и проверьте что результат эквивалентен тому, что мы вывели.
Поворот в трехмерном пространстве
Мы рассмотрели поворот в двумерном пространстве, а так же вывели матрицу для него. Теперь возникает вопрос, а как получить подобные преобразования для трех измерений? В двумерном случае мы вращали вектора на плоскости, здесь же бесконечное количество плоскостей относительно которых мы можем это сделать. Однако существует три базовых типа вращений, при помощи которых можно выразить любой поворот вектора в трехмерном пространстве — это XY, XZ, YZ вращения.
При таком повороте мы вращаем вектор относительно оси OZ координатной системы. Представьте, что вектора — это вертолётные лопасти, а ось OZ — это мачта на которой они держаться. При XY вращении вектора будут поворачиваться относительно оси OZ, как лопасти вертолета относительно мачты.
Заметьте, что при таком вращении z координаты векторов не меняются, а меняются x и x координаты — поэтому это и называется XY вращением.
Нетрудно вывести и формулы для такого вращения: z — координата остается прежней, а x и y изменяются по тем же принципам, что и в 2д вращении.
То же в виде матрицы:
Для XZ и YZ вращений все аналогично:
Проекция
Понятие проекции может варьироваться в зависимости от контекста в котором его используют. Многие, наверное, слышали про такие понятия, как проекция на плоскость или проекция на координатную ось.
В том понимании которое мы используем здесь проекция на вектор — это тоже вектор. Его координаты – точка пересечения перпендикуляра опущенного из вектора a на b с вектором b.
Для задания такого вектора нам нужно знать его длину и направление. Как мы знаем прилегающий катет и гипотенуза в прямоугольном треугольнике связаны отношением косинуса, поэтому используем его, чтобы выразить длину вектора проекции:
Направление вектора проекции по определению совпадает с вектором b, значит проекция определяется формулой:
Здесь мы получаем направление проекции в виде единичного вектора и умножаем его на длину проекции. Несложно понять, что результатом будет как раз-таки то, что мы ищем.
Теперь представим все через скалярное произведение:
Получаем удобную формулу для нахождения проекции:
Системы координат. Базисы
Многие привыкли работать в стандартной системе координат XYZ, в ней любые 2 оси будут перпендикулярны друг другу, а координатные оси можно представить в виде единичных векторов:
На деле же систем координат бесконечное множество, каждая из них является базисом. Базис n-мерного пространства является набором векторов через которые представляются все вектора этого пространства. При этом ни один вектор из базиса нельзя представить через другие его вектора. По сути каждый базис является отдельной системой координат, в которой вектора будут иметь свои, уникальные координаты.
Давайте разберем, что из себя представляет базис для двумерного пространства. Возьмём для примера всем знакомую декартову систему координат из векторов X , Y , которая является одним из базисов для двумерного пространства:
Любой вектор на плоскости можно представить в виде суммы векторов этого базиса с некими коэффициентами или же в виде линейной комбинации. Вспомните, что вы делаете когда записываете координаты вектора — вы пишете x — координату, а далее — y. Таким образом вы на самом деле определяете коэффициенты разложения по векторам базиса.
Теперь возьмём другой базис:
Через его вектора также можно представить любой 2д вектор:
А вот такой набор векторов не является базисом двухмерного пространства:
В нем два вектора и лежат на одной прямой. Какие бы их комбинации вы не брали получать будете только вектора, лежащие на общей прямой y = x. Для наших целей такие дефектные не пригодятся, однако, понимать разницу, я считаю, стоит. По определению все базисы объединяет одно свойство – ни один из векторов базиса нельзя представить в виде суммы других векторов базиса с коэффициентами или же ни один вектор базиса не является линейной комбинацией других. Вот пример набора из 3-х векторов который так же не является базисом:
Через него можно выразить любой вектор двумерной плоскости, однако вектор в нем является лишним так как сам может быть выражен через вектора и как + .
Вообще любой базис n-мерного пространства будет содержать ровно n векторов, для 2д это n соответственно равно 2.
Перейдем к 3д. Трехмерный базис будет содержать в себе 3 вектора:
Если для двумерного базиса достаточно было двух векторов не лежащих на одной прямой, то в трехмерном пространстве набор векторов будет базисом если:
- 1)2 вектора не лежат на одной прямой
- 2)3-й не лежит на плоскости образованной двумя другими.
С данного момента базисы, с которыми мы работаем будут ортогональными (любые их вектора перпендикулярны) и нормированными (длина любого вектора базиса — 1). Другие нам просто не понадобятся. К примеру стандартный базис
удовлетворяет этим критериям.
Переход в другой базис
До сих пор мы записывали разложение вектора как сумму векторов базиса с коэффициентами:
Снова рассмотрим стандартный базис – вектор в нем можно записать так:
Как видите коэффициенты разложения вектора в базисе являются его координатами в этом базисе. Разберем следующий пример:
Этот базис получен из стандартного применением к нему XY вращения на 45 градусов. Возьмем вектор a в стандартной системе имеющий координаты
Через вектора нового базиса его можно разложить таким образом:
Если вы посчитаете эту сумму, то получите – вектор а в стандартном базисе. Исходя из этого выражения в новом базисе вектор а имеет координаты – коэффициенты разложения. Это будет виднее если взглянуть с другого ракурса:
Но как находить эти коэффициенты? Вообще универсальный метод — это решение довольно сложной системы линейных уравнений. Однако как я сказал ранее использовать мы будем только ортогональные и нормированные базисы, а для них есть весьма читерский способ. Заключается он в нахождении проекций на вектора базиса. Давайте с его помощью найдем разложение вектора a в базисе X Y Z
Для начала найдем коэффициент для y’. Первым шагом мы находим проекцию вектора a на вектор y’ (как это делать я разбирал выше):
Второй шаг: делим длину найденной проекции на длину вектора y’, тем самым мы узнаем “сколько векторов y’ помещается в векторе проекции” – это число и будет коэффициентом для y’, а также y — координатой вектора a в новом базисе! Для x’ и z’ повторим аналогичные операции:
Теперь мы имеем формулы для перехода из стандартного базиса в новый:
Ну а так как мы используем только нормированные базисы и длины их векторов равны 1 отпадет необходимость делить на длину вектора в формуле перехода:
Раскроем x-координату через формулу проекции:
Заметьте, что знаменатель (x’, x’) и вектор x’ в случае нормированного базиса так же равен 1 и их можно отбросить. Получим:
Мы видим, что координата x базисе выражается как скалярное произведение (a, x’), координата y соответственно – как (a, y’), координата z – (a, z’). Теперь можно составить матрицу перехода к новым координатам:
Системы координат со смещенным центром
У всех систем координат которые мы рассмотрели выше началом координат была точка . Помимо этого существуют еще системы со смещенной точкой начала координат:
Для того, чтобы перевести вектор в такую систему нужно сначала выразить его относительно нового центра координат. Сделать это просто — вычесть из вектора этот центр. Таким образом вы как бы «передвигаете» саму систему координат к новому центу, при этом вектор остается на месте. Далее можно использовать уже знакомую нам матрицу перехода.
Пишем геометрический движок. Создание проволочного рендера.
Ну вот, думаю тому кто прошел раздел с математикой и не закрыл статью можно промывать мозги более интересными вещами! В этом разделе мы начнем писать основы 3д движка и рендеринга. Вообще рендеринг — это довольно сложная процедура, которая включает в себя много разных операций: отсечение невидимых граней, растеризация, расчет света, обработку различных эффектов, материалов(иногда даже физику). Все это мы частично разберем в дальнейшем, а сейчас мы займемся более простыми вещами — напишем проволочный рендер. Суть его в том, что он рисует объект в виде линий, соединяющих его вершины, поэтому результат выглядит похожим на сеть из проволок:
Полигональная графика
Традиционно в компьютерной графике используется полигональное представление данных трехмерных объектов. Таким образом представляются данные в форматах OBJ, 3DS, FBX и многих других. В компьютере такие данные хранятся в виде двух множеств: множество вершин и множество граней(полигонов). Каждая вершина объекта представлена своей позицией в пространстве — вектором, а каждая грань(полигон) представлена тройкой целых чисел которые являются индексами вершин данного объекта. Простейшие объекты(кубы, сферы и т.д.) состоят из таких полигонов и называются примитивами.
В нашем движке примитив будет основным объектом трехмерной геометрии — все остальные объекты будут наследоваться от него. Опишем класс примитива:
Пока все просто — есть вершины примитива и есть индексы для формирования полигонов. Теперь можно использовать этот класс чтобы создать куб:

Реализуем системы координат
Мало задать объект набором полигонов, для планирования и создания сложных сцен необходимо расположить объекты в разных местах, поворачивать их, уменьшать или увеличивать их в размере. Для удобства этих операций используются так называемые локальные и глобальная системы координат. Каждый объект на сцене имеет свои свою собственную систему координат — локальную, а так же собственную точку центра.
Представление объекта в локальных координатах позволяет легко производить любые операции с ним. Например, для перемещения объекта на вектор a достаточно будет сдвинуть центр его системы координат на этот вектор, для вращения объекта — повернуть его локальные координаты.
При работе с объектом мы будем производить операции с его вершинами в локальной системе координат, при рендеринге будем предварительно переводить все объекты сцены в единую систему координат — глобальную. Добавим системы координат в код. Для этого создадим объект класса Pivot (стержень, точка опоры) который будет представлять локальный базис объекта и его центральную точку. Перевод точки в систему координат представленную Pivot будет производиться в 2 шага:
- 1)Представление точки относительно центра новых координат
- 2)Разложение по векторам нового базиса
Наоборот же, чтобы представить локальную вершину объекта в глобальных координатах необходимо выполнить эти действия в обратном порядке:
- 1)Разложение по векторам глобального базиса
- 2)Представление относительно глобального центра
Напишем класс для представления систем координат:
Теперь используя данный класс добавим в примитивы функции вращения, передвижения и увеличения:
Вращение и перемещение объекта с помощью локальных координат
Рисование полигонов. Камера
Основным объектом сцены будет камера — с помощью нее объекты будут рисоваться на экране. Камера, как и все объекты сцены, будет иметь локальные координаты в виде объекта класса Pivot — через него мы будем двигать и вращать камеру:
Для отображения объекта на экране будем использовать немудреный способ перспективной проекции. Принцип на котором основан этом метод заключается в том, что чем дальше от нас расположен объект тем меньше он будет казаться. Наверное многие решали когда-то в школе задачу про измерение высоты дерева находящимся на некотором расстоянии от наблюдателя:
Представьте, что луч от верхней точки дерева падает на некую проекционную плоскость находящуюся на расстоянии C1 от наблюдателя и рисует на ней точку. Наблюдатель видит эту точку и хочет по ней определить высоту дерева. Как вы могли заметить высота дерева и высота точки на проекционной плоскости связанны отношением подобных треугольников. Тогда наблюдатель может определить высоту точки используя это отношение:
Наоборот же, зная высоту дерева он может найти высоту точки на проекционной плоскости:
Теперь вернемся к нашей камере. Представьте, что к оси z координат камеры прикреплена проекционная плоскость на расстоянии z’ от начала координат. Формула такой плоскости z = z’, ее можно задать одним числом — z’. На эту плоскость падают лучи от вершин различных объектов. Попадая на плоскость луч будет оставлять на ней точку. Соединяя такие точки можно нарисовать объект.
Такая плоскость будет представлять экран. Координату проекции вершины объекта на экран будем находить в 2 этапа:
- 1)Переводим вершину в локальные координаты камеры
- 2)Находим проекцию точки через отношение подобных треугольников
Проекция будет 2-мерным вектором, ее координаты x’ и y’ и будут определять позицию точки на экране компьютера.
Данный код имеет несколько ошибок, о исправлении которых мы поговорим далее.
Отсекаем невидимые полигоны
Спроецировав таким образом на экран три точки полигона мы получим координаты треугольника который соответствует отображению полигона на экране. Но таким образом камера будет обрабатывать любые вершины, включая те, чьи проекции выходят за область экрана, если попытаться нарисовать такую вершину велика вероятность словить ошибок. Камера так же будет обрабатывать полигоны которые находятся позади нее (координаты z их точек в локальном базисе камеры меньше z’) — такое «затылковое» зрение нам тоже ни к чему.
Для отсечения невидимых вершин в open gl используются метод усекающей пирамиды. Заключается он в задании двух плоскостей — ближней(near plane) и дальней(far plane). Все, что лежит между этими двумя плоскостями будет подлежать дальнейшей обработке. Я же использую упрощенный вариант с одной усекающей плоскостью — z’. Все вершины, лежащие позади нее будут невидимыми.
Добавим в камеру два новых поля — ширину и высоту экрана.
Теперь каждую спроецированную точку будем проверять на попадание в область экрана. Так же отсечем точки позади камеры. Если точка лежит сзади или ее проекция не попадает на экран то метод вернет точку .
Переводим в экранные координаты
Здесь я разъясню некоторый момент. Cвязан он с тем, что во многих графических библиотеках рисование происходит в экранной системе координат, в таких координатах начало — это верхняя левая точка экрана, x увеличивается при движении вправо, а y — при движении вниз. В нашей проекционной плоскости точки представлены в обычных декартовых координатах и перед отрисовкой необходимо переводить эти координаты в экранные. Сделать это нетрудно, нужно только сместить начало координат в верхний левый угол и инвертировать y:
Корректируем размер спроецированного изображения
Если вы используете предыдущий код для того, чтобы нарисовать объект то получите что-то вроде этого:
Почему — то все объекты рисуются очень маленькими. Для того, чтобы понять причину вспомните как мы вычисляли проекцию — умножали x и y координаты на дельту отношения z’ / z. Это значит, что размер объекта на экране зависит от расстояния до проекционной плоскости z’. А ведь z’ мы можем задать сколь угодно маленьким значением. Значит нам нужно корректировать размер проекции в зависимости от текущего значения z’. Для этого добавим в камеру еще одно поле — угол ее обзора.
Он нам нужен для сопоставления углового размера экрана с его шириной. Угол будет сопоставлен с шириной экрана таким образом: максимальный угол в пределах которого смотрит камера — это левый или правый край экрана. Тогда максимальный угол от оси z камеры составляет o / 2. Проекция, которая попала на правый край экрана должна иметь координату x = width / 2, а на левый: x = -width / 2. Зная это выведем формулу для нахождения коэффициента растяжения проекции:
Вот такой простой код отрисовки я использовал для теста:
Давайте проверим рендер на сцене и кубов:
И да, все прекрасно работает. Для тех, кому разноцветные кубики не кажутся пафосными я написал функцию парсинга моделей формата OBJ в объекты типа Primitive, залил фон черным и отрисовал несколько моделей:
Растеризация полигонов. Наводим красоту.
В прошлом разделе мы написали проволочный рендер. Теперь мы займемся его модернизацией — реализуем растеризацию полигонов.
По простому растеризировать полигон — это значит закрасить его. Казалось бы зачем писать велосипед, когда есть уже готовые функции растеризации треугольника. Вот что будет если нарисовать все дефолтными инструментами:
Современное искусство, полигоны сзади нарисовались поверх передних, одним словом — каша. К тому же как таким образом текстурировать объекты? Да, никак. Значит нам нужно написать свой имба-растерайзер, который будет уметь в отсечение невидимых точек, текстуры и даже в шейдеры! Но для того чтобы это сделать стоит понять как вообще красить треугольники.
Алгоритм Брезенхема для рисования линии.
Начнем с линий. Если кто не знал алгоритм Брезенхема — это основной алгоритм рисования прямых в компьютерной графике. Он или его модификации используется буквально везде: рисование прямых, отрезков, окружностей и т.п. Кому интересно более подробное описание — читайте вики. Алгоритм Брезенхема
Имеется отрезок соединяющий точки и . Чтобы нарисовать отрезок между ними нужно закрасить все пиксели которые попадают на него. Для двух точек отрезка можно найти x-координаты пикселей в которых они лежат: нужно лишь взять целые части от координат x1 и x2. Чтобы закрасить пиксели на отрезке запускаем цикл от x1 до x2 и на каждой итерации вычисляем y — координату пикселя который попадает на прямую. Вот код:
Картинка из вики
Растеризация треугольника. Алгоритм заливки
Линии рисовать мы умеем, а вот с треугольниками будет чуть посложнее(не намного)! Задача рисования треугольника сводится к нескольким задачам рисования линий. Для начала разобьем треугольник на две части предварительно отсортировав точки в порядке возрастания x:
Заметьте — теперь у нас есть две части в которых явно выражены нижняя и верхняя границы. все что осталось — это залить все пиксели находящиеся между ними! Сделать это можно в 2 цикла: от x1 до x2 и от x3 до x2.
Несомненно этот код можно отрефакторить и не дублировать цикл:
Отсечение невидимых точек.
Для начала подумайте каким образом вы видите. Сейчас перед вами экран, а то что находится позади него скрыто от ваших глаз. В рендеринге работает примерно такой же механизм — если один полигон перекрывает другой рендер нарисует его поверх перекрытого. Наоборот же, закрытую часть полигона рисовать он не будет:
Для того, чтобы понять видима точки или нет, в рендеринге применяют механизм zbuffer-а(буфера глубины). zbuffer можно представить как двумерный массив (можно сжать в одномерный) с размерностью width * height. Для каждого пикселя на экране он хранит значение z — координаты на исходном полигоне откуда эта точка была спроецирована. Соответственно чем ближе точка к наблюдателю, тем меньше ее z — координата. В конечном итоге если проекции нескольких точек совпадают растеризировать нужно точку с минимальной z — координатой:
Теперь возникает вопрос — как находить z-координаты точек на исходном полигоне? Это можно сделать несколькими способами. Например можно пускать луч из начала координат камеры, проходящий через точку на проекционной плоскости , и находить его пересечение с полигоном. Но искать пересечения крайне затратная операция, поэтому будем использовать другой способ. Для рисования треугольника мы интерполировали координаты его проекций, теперь, помимо этого, мы будем интерполировать также и координаты исходного полигона. Для отсечения невидимых точек будем использовать в методе растеризации состояние zbuffer-а для текущего фрейма.
Мой zbuffer будет иметь вид Vector3[] — он будет содержать не только z — координаты, но и интерполированные значения точек полигона(фрагменты) для каждого пикселя экрана. Это сделано в целях экономии памяти так как в дальнейшем нам все равно пригодятся эти значения для написания шейдеров! А пока что имеем следующий код для определения видимых вершин(фрагментов):
Анимация шагов растеризатора(при перезаписи глубины в zbuffer-е пиксель выделяется красным):
Для удобства я вынес весь код в отдельный модуль Rasterizer:
Теперь проверим работу рендера. Для этого я использую модель Сильваны из известной RPG «WOW»:
Не очень понятно, правда? А все потому что здесь нет ни текстур ни освещения. Но вскоре мы это исправим.
Текстуры! Нормали! Освещение! Мотор!
Почему я объединил все это в один раздел? А потому что по своей сути текстуризация и расчет нормалей абсолютно идентичны и скоро вы это поймете.
Для начала рассмотрим задачу текстуризации для одного полигона. Теперь помимо обычных координат вершин полигона мы будем хранить еще и его текстурные координаты. Текстурная координата вершины представляется двумерным вектором и указывает на пиксель изображения текстуры. В интернете я нашел хорошую картинку чтобы показать это:
Заметьте, что начало текстуры (левый нижний пиксель) в текстурных координатах имеет значение , конец (правый верхний пиксель) — . Учитывайте систему координат текстуры и возможность выхода за границы картинки когда текстурная координата равна 1.
Сразу создадим класс для представления данных вершины:
Зачем нужны нормали я объясню позже, пока что просто будем знать, что у вершин они могут быть. Теперь для текстуризации полигона нам необходимо каким-то образом сопоставить значение цвета из текстуры конкретному пикселю. Помните как мы интерполировали вершины? Здесь нужно сделать то же самое! Я не буду еще раз переписывать код растеризации, а предлагаю вам самим реализовать текстурирование в вашем рендере. Результатом должно быть корректное отображение текстур на модели. Вот, что получилось у меня:
Вся информация о текстурных координатах модели находятся в файле OBJ. Для того, чтобы использовать это изучите формат: Формат OBJ.
Освещение
С текстурами все стало гораздо веселее, но по настоящему весело будет когда мы реализуем освещение для сцены. Для имитации «дешевого» освещения я буду использовать модель Фонга.
Модель Фонга
В общем случае этот метод имитирует наличие 3х составляющих освещения: фоновая(ambient), рассеянная(diffuse) и зеркальная(reflect). Сумма этих трех компонент в итоге даст имитацию физического поведения света.
Для расчета освещения по Фонгу нам будут нужны нормали к поверхностям, для этого я и добавил их в классе Vertex. Где же брать значения этих нормалей? Нет, ничего вычислять нам не нужно. Дело в том, что великодушные 3д редакторы часто сами считают их и предоставляют вместе с данными модели в контексте формата OBJ. Распарсив файл модели мы получаем значение нормалей для 3х вершин каждого полигона.
Картинка из вики
Для того, чтобы посчитать нормаль в каждой точке на полигоне нужно интерполировать эти значения, мы уже умеем делать это. Теперь разберем все составляющие для вычисления освещения Фонга.
Фоновый свет (Ambient)
Изначально мы задаем постоянное фоновое освещение, для нетекстурированных объектов можно выбрать любой цвет, для объектов с текстурами я делю каждую из компонент RGB на некий коэффициент базового затенения (baseShading).
Рассеянный свет (Diffuse)
Когда свет падает на поверхность полигона он равномерно рассеивается. Для расчета diffuse значения на конкретном пикселе учитывается угол под которым свет падает на поверхность. Чтобы рассчитать этот угол можно применить скалярное произведение падающего луча и нормали(само собой вектора перед этим нужно нормализировать). Этот угол будет умножаться на некий коэффициент интенсивности света. Если скалярное произведение отрицательно — это значит, что угол между векторами больше 90 градусов. В этом случае мы начнем рассчитывать уже не осветление, а, наоборот, затенение. Стоит избегать этого момента, сделать это можно с помощью функции max.
Давайте применим рассеянный свет и рассеем тьму:
Зеркальный свет (Reflect)
Для расчета зеркальной компоненты нужно учитывать точку из которой мы смотрим на объект. Теперь мы будем брать скалярное произведение луча от наблюдателя и отраженного от поверхности луча умноженное на коэффициент интенсивности света.
Найти луч от наблюдателя к поверхности легко — это будет просто позиция обрабатываемой вершины в локальных координатах. Для того, чтобы найти отраженный луч я использовал следующий способ. Падающий луч можно разложить на 2 вектора: его проекцию на нормаль и второй вектор который можно найти вычитанием из падающего луча этой проекции. Чтобы найти отраженный луч нужно из проекции на нормаль вычесть значение второго вектора.
Теперь картинка выглядит следующим образом:
Конечной точкой моего изложения будет реализация теней для рендера. Первая тупиковая идея которая зародилась у меня в черепушке — для каждой точки проверять не лежит ли между ней и светом какой-нибудь полигон. Если лежит — значит не нужно освещать пиксель. Модель Сильваны содержит 220к с лихвой полигонов. Если так для каждой точки проверять пересечение со всеми этими полигонами, то нужно сделать максимум 220000 * 1920 * 1080 * 219999 вызовов метода пересечения! За 10 минут мой компьютер смог осилить 10-у часть всех вычислений (2600 полигонов из 220000), после чего у меня случился сдвиг и я отправился на поиски нового метода.
В интернете мне попался очень простой и красивый способ, который выполняет те же вычисления в тысячи раз быстрее. Называется он Shadow mapping(построение карты теней). Вспомните как мы определяли видимые наблюдателю точки — использовали zbuffer. Shadow mapping делает тоже самое! В первом проходе наша камера будет находиться в позиции света и смотреть на объект. Таким образом мы сформируем карту глубин для источника света. Карта глубин — это знакомый нам zbuffer. Во втором проходе мы используем эту карту, чтобы определять вершины которые должны освещаться. Сейчас я нарушу правила хорошего кода и пойду читерским путем — просто передам шейдеру новый объект растеризатора и он используя его создаст нам карту глубин.
Для статичной сцены достаточно будет один раз вызвать построение карты глубин, после во всех фреймах использовать ее. В качестве тестовой я использую менее полигональную модель пушки. Вот такое изображение получается на выходе:
Многие из вас наверное заметили артефакты данного шейдера(необработанные светом черные точки). Опять же обратившись в всезнающую сеть я нашел описание этого эффекта с противным названием «shadow acne»(да простят меня люди с комплексом внешности). Суть таких «зазоров» заключается в том, что для определения тени мы используем ограниченное разрешение карты глубин. Это значит, что несколько вершин при рендеринге получают одно значение из карты глубин. Такому артефакту наиболее подвержены поверхности на которые свет падает под пологим углом. Эффект можно исправить, увеличив разрешение рендера для света, однако существует более элегантный способ. Заключается он в том, чтобы добавлять определенный сдвиг для глубины в зависимости от угла между лучом света и поверхностью. Это можно сделать при помощи скалярного произведения.
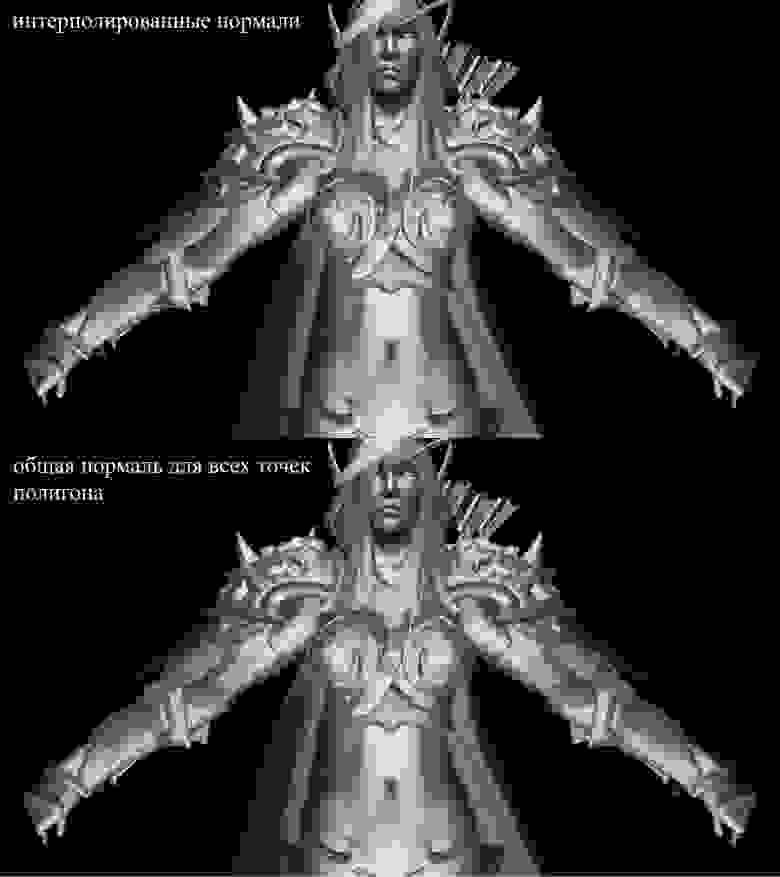
Играем с нормалями
Я подумал, стоит ли интерполировать значения нормалей, если можно посчитать среднее между 3мя нормалями полигона и использовать для каждой его точки. Оказывается, что интерполяция дает куда более естественный и гладкий материал картинки.
Двигаем свет
Реализовав простой цикл получим набор отрендеренных картинок с разными позициями света на сцене:
Производительность
Для теста использовалась следующие конфигурации:
- Модель Сильваны: 220к полигонов.
- Разрешение экрана: 1920×1080.
- Шейдеры: Phong model shader
- Конфигурация компьютера: cpu — core i7 4790, 8 gb ram
FPS рендеринга составлял 1-2 кадр/сек. Это далеко не realtime. Однако стоит все же учитывать, что вся обработка происходила без использования многопоточности, т.е. на одном ядре cpu.
Матрицы поворота, углы Эйлера и кватернионы (Rotation matrices, Euler angles and quaternions)
Объект обычно определяется в удобной для его описания локальной системе координат (ЛСК), а его положение в пространстве — в глобальной системе координат (ГСК).
В трёхмерном пространстве переход из одной СК в другую описывается в общем случае системой линейных уравнений:

Уравнения могут быть записаны через матрицы аффинных преобразований в однородных координатах одним из 2-х способов:

В ортогональных СК оси X, Y и Z взаимно перпендикулярны и расположены по правилу правой руки:

На рисунке справа большой палец определяет направление оси, остальные пальцы — положительное направление вращения относительно этой оси.
Все три вектора направлений есть единичными.

Ниже приводится единичная матрица для 2-х способов записи уравнений геометрических преобразований. Такая матрица не описывает ни перемещения, ни вращения. Оси ЛСК и ГСК совпадают.

Далее рассматривается матрица для второго способа матричной записи уравнений (матрица справа). Этот способ встречается в статьях значительно чаще.
При использовании матрицы вы можете игнорировать нижнюю строку. В ней всегда хранятся одни и те же значения 0, 0, 0, 1. Она добавлена для того, чтобы мы могли перемножать матрицы (напомню правило перемножения матриц и отмечу, что всегда можно перемножать квадратные матрицы). Подробнее см. Композиция матриц. Однородные координаты.
Остальные 12 значений определяют координатную систему. Первый столбец описывает компоненты направления оси X(1,0,0). Второй столбец задает направление оси Y(0,1,0), третий – оси Z (0,0,1). Последний столбец определяет положение начала системы координат (0,0,0).
Как будет выглядеть матрица Евклидового преобразования (преобразование движения) для задания ЛСК , с началом в точке (10,5,0) и повёрнутой на 45° вокруг оси Z глобальной СК, показано на рисунке.

Рассмотрим сначала ось X. Если новая система координат повернута на 45° вокруг оси z, значит и ось x повернута относительно базовой оси X на 45° в положительном направлении отсчета углов. Таким образом, ось X направлена вдоль вектора (1, 1, 0), но поскольку вектор системы координат должен быть единичным, то результат должен выглядеть так (0.707, 0.707, 0). Соответственно, ось Y имеет отрицательную компоненту по X и положительную по Y и будет выглядеть следующим образом (-0.707, 0.707, 0). Ось Z направления не меняет (0, 0, 1). Наконец, в четвертом столбце вписываются координаты точки начала системы координат (10, 5, 0).
Частным случаем матриц геометрических преобразований есть матрицы поворота ЛСК относительно базовых осей ГСК. Вектора осей ЛСК здесь выражены через синусы и косинусы углов вращения относительно оси, перпендикулярной к плоскости вращения.

От матрицы преобразований размером 4*4 можно перейти непосредственно к матрице поворота 3*3, убрав нижний ряд и правый столбец. При этом, система линейных уравнений записывается без свободных элементов (лямда, мю, ню), которые определяют перемещение вдоль осей координат.
Путем перемножения базовых матриц можно получать комбинированные вращения. Ниже рассмотрены возможности комбинировать вращениями через матрицы поворота на примерах работы с углами Эйлера.
Матрицы поворота и углы Эйлера


От выбора осей и последовательности вращения зависит конечный результат. На рисунках отображена следующая последовательность вращения относительно осей ЛСК:
- оси Z (угол alpha);
- оси X (угол beta);
- оси Z (угол gamma).

Получил от читателя этой статьи вопрос: «Как понять, из каких углов поворота вокруг осей X,Y,Z можно получить текущее положение объекта, когда в качестве задания мы уже имеем повернутый объект, а нужно вывести его в это положение, последовательно повернув его из какого-то начального положения до полного совмещения с заданным?»
Мой ответ: «Если я правильно понял вопрос, то Вас интересует, как от начального положения перейти к заданному положению объекта, используя для этого элементарные базовые аффинные преобразования.
Начну с аналогии. Это как в шахматах. Мы знаем как ходит конь. Необходимо переместить его в результате многоходовки в нужную клетку на доске — при условии, что это возможно.
Подробно эта проблематика рассмотрена в статье Преобразование координат при калибровке роботов.
Умение правильно выбирать последовательность элементарных геометрических преобразований помогает в решении множества других задач (см. Примеры геометрических преобразований).»
Можно получить результирующую матрицу, которая определяет положение ГСК относительно ЛСК. Для этого необходимо перемножить матрицы с отрицательными углами в последовательности выполнения поворотов:


Почему знак угла поворота меняется на противоположный? Объяснение этому простое. Движение относительно. Абстрагируемся и представим, что ГСК меняет положение относительно неподвижной ЛСК. При этом направление вращения меняется на противоположное.
Перемножение матриц даст следующий результат:

Результирующую матрицу можно использовать для пересчета координат из ГСК в ЛСК:

Для пересчета координат из ЛСК в ГСК используется результирующая обратная матрица.

В обратной матрице последовательность поворота и знаки углов меняются на противоположные (в рассматриваемом примере снова на положительные) по сравнению с матрицей определения положения ГСК относительно ЛСК.


Перемножение матриц даст следующий результат:

Выше был рассмотрен случай определения углов Эйлера через вращение относительно осей ЛСК. То же взаимное положение СК можно получить, выполняя вращение относительно осей ГСК:
- оси z (угол (gamma+pi/2));
- оси y (угол угол beta);
- оси z (угол (-alpha)).

Определение углов Эйлера через вращение относительно осей ГСК позволяет также просто получить зависимости для пересчета координат из ЛСК в ГСК через перемножение матриц поворота.

В рамках рассматриваемой задачи вместо угла gamma в матрицe Az используем угол gamma+pi/2.
Также легко можно перейти к зависимостям для пересчета координат из ГСК в ЛСК.

Обратная матрица получается перемножением обратных матриц в обратном порядке по сравнению с прямым преобразованием. При этом каждая из обратных матриц вращения может быть получена заменой знака угла на противоположный.
Детально с теоретическими основами аффинных преобразований (включая и вращение) можно ознакомиться в статье Геометрические преобразования в графических приложениях
Примеры преобразований рассмотрены в статьях:
Axis Angle представление вращения
Выбрав подходящую ось (англ. rotation axis) и угол (англ. rotation angle) можно задать любую ориентацию объекта.

Обычно хранят ось вращения в виде единичного вектора и угол поворота вокруг этой оси в радианах или градусах.
q = [ x, y, z, w ] = [ v, w ]
В некоторых случаях удобно хранить угол вращения и ось в одном векторе. Направление вектора при этом совпадает с направлением оси вращения, а его длина равна углу поворота:
q = [ x, y, z]; w=sqrt (x*x +y*y +z*z)
В физике, таким образом хранят угловую скорость. Направление вектора совпадает с направлением оси вращения, а длина вектора равна скорости (в радианах в секунду).
Можно описать рассмотренные выше углы Эйлера через Axis Angle представление в 3 этапа:
q1 = [ 0, 0, 1, alpha]; q2 = [ 1, 0, 0, beta]; q3 = [ 0, 0, 1, gamma ]
Здесь каждое вращение выполняется относительно осей текущего положения ЛСК. Такое преобразование равнозначно рассмотренному выше преобразованию через матрицы поворота:
Возникает вопрос, а можно ли 3 этапа Axis Angle представления объединить в одно, подобно матрицам поворота? Попробуем решить геометрическую задачу по определению координат последнего вектора вращения в последовательности преобразований через Axis Angle представления:
q = [ x, y, z, gamma ]

Есть ли представление q= [x, y, z, gamma] композицией последовательности из 3-х этапов преобразований? Нет! Координаты x, y, z определяют всего лишь положение оси Z ЛСК после первого и второго этапов преобразований:

При этом ось Z, отнюдь, не есть вектор вращения для Axis Angle представления, которое могло бы заменить рассмотренные 3-х этапа преобразований.
Еще раз сформулирую задачу, которая математически пока не решена: «Необходимо найти значение угла (rotation angle) и положение оси (rotation axis), вращением относительно которой на этот угол можно заменить комбинацию из 3-х поворотов Эйлера вокруг осей координат».
К сожалению, никакие операции (типа объединения нескольких преобразований в одно) с Axis Angle представлениями нельзя выполнить. Не будем расстраиваться. Это можно сделать через кватернионы, которые также определяют вращение через параметры оси и угол.
Кватернионы
Кватернион (как это и видно по названию) представляет собой набор из четырёх параметров, которые определяют вектор и угол вращения вокруг этого вектора. По сути такое определение ничем не отличается от Axis Angle представления вращения. Отличия лишь в способе представления. Как же хранят вращение в кватернионе?
q = [ V*sin(alpha/2), cos(alpha/2) ]
В кватернионе параметры единичного вектора умножается на синус половины угла поворота. Четвертый компонент — косинус половины угла поворота.
Таблица с примерами значений кватернионов:

Представление вращения кватернионом кажется необычным по сравнению с Axis Angle представлением. Почему параметры вектора умножаются на синус половины угла вращения, четвертый параметр — косинус половины угла вращения, а не просто угол?
Откуда получено такое необычное представление кватерниона детально можно ознакомиться в статье Доступно о кватернионах и их преимуществах. Хотя программисту не обязательно знать эти детали, точно также как и знать, каким образом получены матрицы преобразования пространства. Достаточно лишь знать основные операции с кватернионами, их смысл и правила применения.
Основные операции над кватернионами
Кватернион удобно рассматривать как 4d вектор, и некоторые операции с ним выполняются как над векторами.
Сложение, вычитание и умножение на скаляр.
Смысл операции сложения можно описать как «смесь» вращений, т.е. мы получим вращение, которое находится между q и q’.
Что-то подобное сложению кватернионов выполнялось при неудачной попытке объединить 3 этапа Axis Angle представления.
Умножение на скаляр на вращении не отражается. Кватернион, умноженный на скаляр, представляет то же самое вращение, кроме случая умножения на 0. При умножении на 0 мы получим «неопределенное» вращение.
Пример сложения 2-х кватернионов:
Норма и модуль
Следует различать (а путают их часто) эти две операции:
Модуль (magnitude), или как иногда говорят «длина» кватерниона:
Через модуль кватернион можно нормализовать. Нормализация кватерниона — это приведение к длине = 1 (так же как и в векторах):
Обратный кватернион или сопряжение ( conjugate )
Обратный кватернион задает вращение, обратное данному. Чтобы получить обратный кватернион достаточно развернуть вектор оси в другую сторону и при необходимости нормализовать кватернион.
Например, если разворот вокруг оси Y на 90 градусов = (w=0,707; x = 0; y = 0,707; z=0), то обратный = (w=0,707; x = 0; y = -0,707; z=0).
Казалось бы, можно инвертировать только компоненту W, но при поворотах на 180 кватернион представляется как (w=1; x = 0; y = 0; z=0), то есть, у него длина вектора оси = 0.
Фрагмент программной реализации:
Инверсный (inverse) кватернион
Существует такой кватернион, при умножении на который произведение дает нулевое вращение и соответствующее тождественному кватерниону (identity quaternion), и определяется как:
Тождественный кватернион
Записывается как q[0, 0, 0, 1]. Он описывает нулевой поворот (по аналогии с единичной матрицей), и не изменяет другой кватернион при умножении.
Скалярное произведение
Скалярное произведение полезно тем, что дает косинус половины угла между двумя кватернионами, умноженный на их длину. Соответственно, скалярное произведение двух единичных кватернионов даст косинус половины угла между двумя ориентациями. Угол между кватернионами — это угол поворота из q в q’ (по кратчайшей дуге).
Вращение 3d вектора
Вращение 3d вектора v кватернионом q определяется как
причем вектор конвертируется в кватернион как
и кватернион обратно в вектор как
Умножение кватернионов
Одна из самых полезных операций, она аналогична умножению двух матриц поворота. Итоговый кватернион представляет собой комбинацию вращений — сначала объект повернули на q, а затем на q’ (если смотреть из глобальной системы координат).
Примеры векторного и скалярного перемножения 2-х векторов


Пример умножения 2-х кватернионов:
Конвертирование между кватернионом и Axis Angle представлением

В разделе Axis Angle представление вращения была сделана неудачная попытка объединить 3 Axis Angle представления в одно . Это можно сделать опосредовано. Сначала Axis Angle представления конвертируются в кватернионы, затем кватернионы перемножаются и результат конвертируется в Axis Angle представление.
Пример конвертирования произведения 2-х кватернионов в Axis Angle представление:
Фрагмент программы на C:
Конвертирование кватерниона в матрицу поворота
Матрица поворота выражается через компоненты кватерниона следующим способом:
 где
где

Проверим формулы конвертирования на примере конвертирования произведения 2-х кватернионов в матрицу поворотов:
Определяем элемент матрицы m[0][0] через параметры кватерниона:

Соответствующее произведению кватернионов (q1 и q2) произведение матриц поворотов было получено ранее (см. Матрицы поворота и углы Эйлера):

Как видим, результат m[0][0], полученный через конвертирование, совпал с значением в матрице поворота.
Фрагмент программного кода на С для конвертирования кватерниона в матрицу поворота:
При конвертировании используется только умножения и сложения, что является несомненным преимуществом на современных процессорах.
Часто для задания вращений используют только кватернионы единичной длины, но это не обязательно и иногда даже не эффективно. Разница между конвертированием единичного и неединичного кватернионов составляет около 6-ти умножений и 3-х сложений, зато избавит во многих случаях от необходимости нормировать (приводить длину к 1) кватернион. Если кусок кода критичен по скорости и вы пользуетесь только кватернионами единичной длины тогда можно воспользоваться фактом что норма его равна 1.
Конвертирование матрицы поворота в кватернион

Конвертирование матрицы в кватернион выполняется не менее эффективно, чем кватерниона в матрицу, но в итоге мы получим кватернион неединичной длины. Его можно нормализовать.
Фрагмент программного кода конвертирования матрицы поворота в кватернион: