О чем эта статья:
10 класс, ЕГЭ/ОГЭ
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
- Единичная окружность в тригонометрии
- Алгебра
- Числовая и единичная окружность
- Откладывание углов на единичной окружности
- Тригонометрические функции угла (дуги) в математике с примерами решения и образцами выполнения
- Векторы. Обобщение понятий угла и дуги. Проекция вектора
- Положительные углы и дуги, меньшие 360°
- Углы и дуги, большие 360°
- Отрицательные углы. Сложение и вычитание углов
- Тригонометрические функции произвольного угла
- Изменение основных тригонометрических функций при изменении угла от 0 до 2 пи
- Соотношения между тригонометрическими функциями одного и того же угла
- Вычисление значений тригонометрических функций по значению одной из них
- Значения тригонометрических функций некоторых углов
- Четность, нечетность и периодичность тригонометрических функций
- Понятие периодической функции
- Периодичность тригонометрических функций
- Зависимость между тригонометрическими функциями дополнительных углов
- Формулы приведения
Единичная окружность в тригонометрии
Все процессы тригонометрии изучают на единичной окружности. Сейчас узнаем, какую окружность называют единичной и дадим определение.
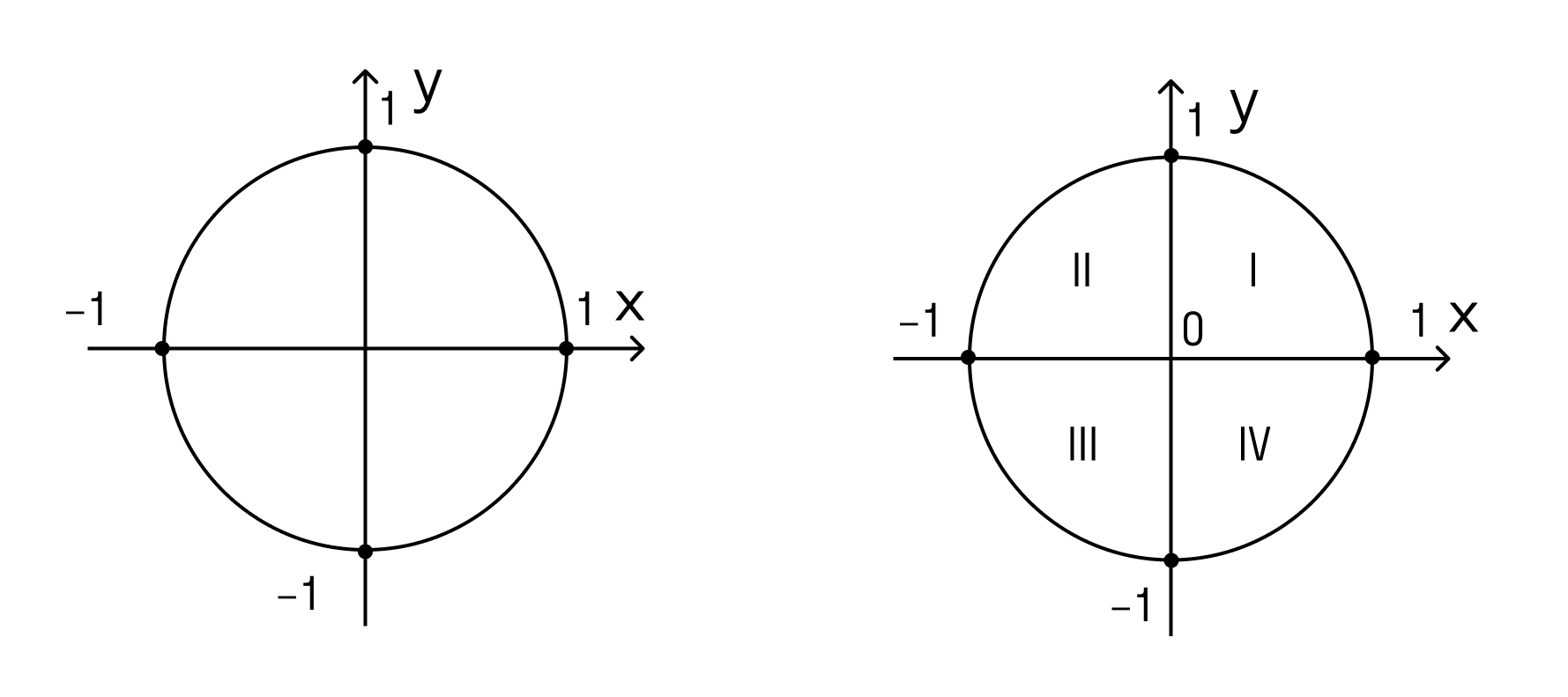
Единичная окружность — это окружность с центром в начале прямоугольной декартовой системы координат и радиусом, равным единице.
Прямоугольная система координат — прямолинейная система координат с взаимно перпендикулярными осями на плоскости или в пространстве. Наиболее простая и поэтому часто используемая система координат.
Радиус — отрезок, который соединяет центр окружности с любой точкой, лежащей на окружности, а также длина этого отрезка. Радиус составляет половину диаметра.
Единичную окружность с установленным соответствием между действительными числами и точками окружности называют числовой окружностью.
Поясним, как единичная окружность связана с тригонометрией.
В тригонометрии мы постоянно сталкиваемся с углами поворота. А углы поворота связаны с вращением по окружности.
Угол поворота — это угол, который образован положительным направлением оси OX и лучом OA.
Величины углов поворота не зависят от радиуса окружности, по которой происходит вращение, поэтому удобно работать именно с окружностью единичного радиуса. Это позволяет избавиться от коэффициентов при математическом описании. Вот и все объяснение полезности единичной тригонометрической окружности.
Все углы, которые принадлежат одному семейству, дают одинаковые абсолютные значения тригонометрических функций, но эти значения могут различаться по знаку. Вот как:
- Если угол находится в первом квадранте, все тригонометрические функции имеют положительные значения.
- Для угла во втором квадранте все функции, за исключением sin и cos, отрицательны.
- В третьем квадранте значения всех функций, кроме tg и ctg, меньше нуля.
- В четвертом квадранте все функции, за исключением cos и sec, имеют отрицательные значения.
Градусная мера окружности равна 360°. Чтобы решать задачи быстро, важно запомнить, где находятся углы 0°; 90°; 180°; 270°; 360°. Единичная окружность с градусами выглядит так:
Радиан — одна из мер для определения величины угла.
Один радиан — это величина угла между двумя радиусами, проведенными так, что длина дуги между ними равна величине радиуса.
Число радиан для полной окружности — 360 градусов.
Длина окружности равна 2πr, что превышает длину радиуса в 2π раза.
Поскольку по определению 1 радиан — это угол между концами дуги, длина которой равна радиусу, в полной окружности заключен угол, равный 2π радиан.
Потренируемся переводить радианы в градусы. В полной окружности содержится 2π радиан, или 360 градусов. Таким образом:
- 2π радиан = 360°
- 1 радиан = (360/2π) градусов
- 1 радиан = (180/π) градусов
- 360° = 2π радиан
- 1° = (2π/360) радиан
- 1° = (π/180) радиан
Кстати, определение синуса, косинуса, тангенса и котангенса в тригонометрии дается через координаты точек на единичной окружности. Эти определения дают возможность раскрыть свойства синуса, косинуса, тангенса и котангенса.
Уравнение единичной окружности
При помощи этого уравнения, вместе с определениями синуса и косинуса, можно записать основное тригонометрическое тождество:

Курсы по математике в онлайн-школе Skysmart помогут подтянуть оценки, подготовиться к контрольным, ВПР и экзаменам.
Алгебра
План урока:
Числовая и единичная окружность
В средней школе мы уже познакомились с координатной, или числовой прямой. Так называют абстрактную прямую, на которой выбрана точка отсчета, определен единичный отрезок, а также задано направление, в котором следует откладывать положительные числа. С помощью координатной прямой удается наглядно представлять сложение и вычитание как положительных, так и отрицательных чисел, решать задачи, связанные с перемещением по прямой, и делать многое другое.
Однако порою приходится рассматривать задачи, связанные с движением по окружности, а также складывать и вычитать углы. Здесь математикам помогает другая абстракция – числовая окружность. Пусть два гонщика (Вася и Петя) едут по круговой трассе, чья протяженность составляет 1 км. За минуту Вася проехал 1250 м, а Петя преодолел только 500 м. Попытаемся показать их положение графически.
Построим на координатной плоскости окружность с центром в начале координат длиной 1 км. Будем считать, старт находится в крайней правой точке трассы, на пересечении оси Ох и окружности. Также условимся, что гонщики едут против часовой стрелки. Тогда получим такую картинку:
Петя проедет ровно половину окружности и окажется в крайней левой точке трассы. Вася же за минуту успел сделать полный круг (1 км) и проехать ещё 250 м, а потому оказался в верхней точке.
Теперь предположим, что Петя стоит на месте, а Вася проехал ещё 250 м (четверть круга). В результате оба пилота оказались в одной точке, но проехали они разное расстояние! Получается, что по положению гонщика невозможно однозначно определить, сколько именно метров он проехал.
Заметим, что очень удобно характеризовать положение точки на числовой окружности с помощью угла. Достаточно соединить точку отрезком с началом координат. Полученный отрезок образует с прямой Ох некоторый угол α:
В тригонометрии предпочитают использовать особую числовую прямую, радиус которой равен единице. По ряду причин, которые станут ясны чуть позже, с ней очень удобно работать. Такую фигуру называют единичной окружностью.
Выглядит единичная окружность так:
Откладывание углов на единичной окружности
Положение каждой точки на единичной окружности можно указать с помощью угла. Пусть надо найти точку, соответствующую углу 60°. Для этого просто строим угол следующим образом:
Углы, которые откладывают на единичной окружности, называют углами поворота. В данном случае можно утверждать, что точке А соответствует угол поворота, равный 60°.
Отложить можно и угол, больший 90° и даже 180°. Выглядеть они будут примерно так:
Углы можно складывать друг с другом и вычитать. Предположим, нам надо построить угол, равный сумме углов 120° и 110°. Для этого сначала совершить поворот на 120°, а потом от полученного отрезка отложить ещё один угол в 110°:
Ясно, что возможно построить любой угол в диапазоне от 0° до 360°. А можно ли отложить угол, который будет больше 360°? В обычной планиметрии мы не работаем с такими углами, однако в тригонометрии они существуют. Действительно, мы же можем, например, сложить углы 250° и 140°. В итоге получится 250 + 140 = 390°:
В результате мы совершили полный оборот (360°) и вдобавок повернули отрезок ещё на 30°. Получается, что углам в 390° и 30° соответствует одна и та же точка.
Углы можно и вычитать друг из друга. Для этого вычитаемый угол надо отложить в противоположном направлении – не против часовой, а по часовой стрелке. Например, вычитая из 150° угол в 70°, придем в точку, соответствующую 150 – 70 = 80°:
Из арифметики мы помним, что вычитание можно заменить прибавлением противоположного (то есть отрицательного) числа:
Получается, что отложив угол 70° по часовой стрелке, мы прибавили к 150° отрицательный угол (– 70°). То есть на единичной окружности можно откладывать отрицательные углы! Для их получения поворот надо осуществлять по часовой стрелке. Например, угол – 60° будет выглядеть так:
Итак, мы можем откладывать и положительные, и отрицательные углы, а также углы, большие 360°. Вообще в тригонометрии угол может быть равен любому действительному числу. На единичной окружности можно отложить углы величиной 1000°, 1000000° и (– 999999999°) и любые другие, самые большие и самые малые углы. В этом смысле единичная окружность схожа с координатной прямой. Разница лишь в том, что на прямой разным числам всегда соответствуют разные точки, а на окружности разным углам могут соответствовать одни и те же точки.
Ещё раз отметим, что один полный оборот равен 360°. Если отложить на окружности произвольную точку А, которой соответствует угол α, а потом добавить к α ещё 360°, то мы попадем в ту же самую точку:
С точки зрения тригонометрии те углы поворота, которые соответствуют одной точке на единичной окружности, равны друг другу. Поэтому можно записать формулу:
Естественно, при вычитании 360° из угла мы тоже совершим полный поворот, только по часовой стрелке, поэтому верна и другая запись:
Угол, не изменится и в том случае, если мы совершим не один, а два полных оборота, то есть добавим к нему 2•360° = 720°. Можно добавлять к углу два, три, четыре полных поворота, но он не изменится от этого. Обозначим буквой n количество оборотов, которые мы добавляем к углу. Естественно, что n – целое число. Справедливой будет формула:
Например, верны следующие равенства:
15° + 3•360° = 15° + 1080° = 1095°
100° + 10•360° = 100° + 3600° = 3700°
1000° = 1000° – 2•360° = 1000° – 720° = 280°
Очевидно, что любой точке на окружности соответствует какой-то угол α из промежутка 0 ≤ α 1 5
Тригонометрические функции угла (дуги) в математике с примерами решения и образцами выполнения
Тригонометрические функции — элементарные функции, которые исторически возникли при рассмотрении прямоугольных треугольников и выражали зависимости длин сторон этих треугольников от острых углов при гипотенузе (или, что равнозначно, зависимость хорд и высот от центрального угла дуги в круге). Эти функции нашли широкое применение в самых разных областях науки. По мере развития математики определение тригонометрических функций было расширено, в современном понимании их аргументом может быть произвольное вещественное или комплексное число.

Векторы. Обобщение понятий угла и дуги. Проекция вектора
Вектором называется направленный отрезок в плоскости (в пространстве). При изучении тригонометрических функций мы будем рассматривать векторы в плоскости. С каждым вектором связывают понятия направления и длины (абсолютной величины, модуля).
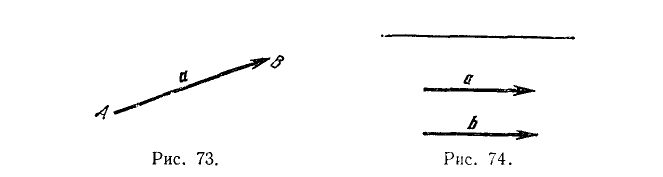
Для вектора (рис. 73) применяются следующие обозначения: 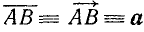 , где А — начало вектора, а В — его конец. Длина отрезка АВ называется длиной вектора
, где А — начало вектора, а В — его конец. Длина отрезка АВ называется длиной вектора  (его абсолютной величиной, модулем) и обозначается так:
(его абсолютной величиной, модулем) и обозначается так:  ,
,  или
или  .
.
Для общности рассматривается и случай нулевого отрезка АА, начало которого совпадает с его концом. Такой отрезок называется нулевым вектором и обозначается через 0. Нулевой вектор имеет длину, равную нулю; ему не приписывается никакого направления.
Следует заметить, что всегда  , причем
, причем  тогда и только тогда, когда — нулевой вектор.
тогда и только тогда, когда — нулевой вектор.
Для векторов не имеют смысла понятия «больше» или «меньше». Можно только говорить, что длина вектора больше длины вектора  , и писать:
, и писать: 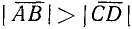 .
.
Два Еектора а и b называются равными, если они:
1) параллельны одной и той же прямой,
2) одинаково направлены,
3) имеют равные длины, т. е. |a| = |b| (рис. 74).
Совокупность векторов с указанным выше определением равенства обычно называют системой свободных векторов. Термин «свободный вектор» связан с тем, что теперь один и тот же вектор может быть изображен направленным отрезком с началом в любой точке: его можно свободно переносить из точки в точку.
Каждому вектору можно поставить в соответствие лежащий на заданной оси OL вектор  где точки
где точки  и
и  соответственно — проекции на ось OL точек А и В (рис. 75). Проекцией вектора на ось OL называется длина вектора ,
соответственно — проекции на ось OL точек А и В (рис. 75). Проекцией вектора на ось OL называется длина вектора ,
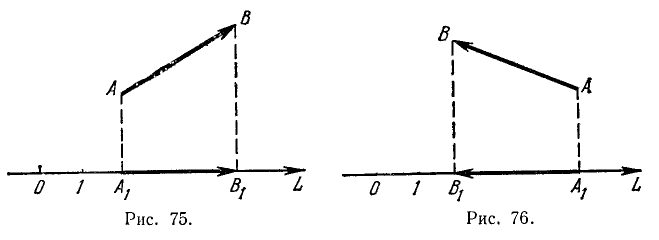
взятая со знаком плюс, если направление вектора совпадает с положительным направлением оси, и со знаком минус в противном случае. Итак, проекция вектора на ось есть по определению число (не вектор!). Условимся проекцию вектора на ось OL обозначать так:  . Возможны следующие
. Возможны следующие
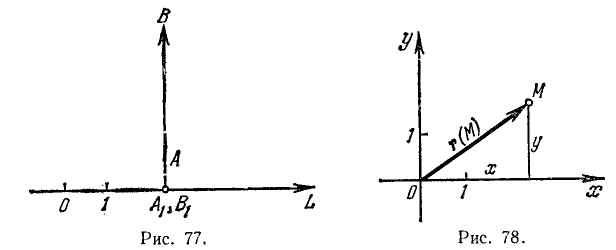
случаи: a)  (рис. 75), б)
(рис. 75), б)  (рис. 76), в)
(рис. 76), в) 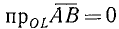 (рис. 77).
(рис. 77).
Рассмотрим теперь совокупность векторов, исходящих из одной точки (начала). Такая совокупность векторов называется центрированной. Примем эту общую точку за начало О декартовой прямоугольной системы координат Оху (см. п. 8).
Определение:
Вектор  , имеющий своим началом точку О (начало координат) и своим концом произвольную точку М плоскости, называется радиусом-вектором точки М или подвижным радиусом (рис. 78). Радиус-вектор обозначается и так: r (М), т. е.
, имеющий своим началом точку О (начало координат) и своим концом произвольную точку М плоскости, называется радиусом-вектором точки М или подвижным радиусом (рис. 78). Радиус-вектор обозначается и так: r (М), т. е. 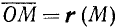 . Через х и у обозначим соответственно абсциссу и ординату точки М, а через r —длину (модуль) вектора . Следовательно,
. Через х и у обозначим соответственно абсциссу и ординату точки М, а через r —длину (модуль) вектора . Следовательно,  . Заметим, что координаты x и у точки М являются вместе с тем проекциями ее радиуса-вектора r (М) на оси координат.
. Заметим, что координаты x и у точки М являются вместе с тем проекциями ее радиуса-вектора r (М) на оси координат.
Положительные углы и дуги, меньшие 360°
На координатной плоскости Оху рассмотрим окружность радиуса R с центром в начале координат (рис. 79).
Будем считать, что угол  образован вращением некоторого подвижного радиуса-вектора, абсолютная величина которого равна R, в направлении, противоположном движению часовой стрелки, от начального положения
образован вращением некоторого подвижного радиуса-вектора, абсолютная величина которого равна R, в направлении, противоположном движению часовой стрелки, от начального положения  , совпадающего с положительным направлением оси Ох, до конечного положения
, совпадающего с положительным направлением оси Ох, до конечного положения  . Такой угол а считается положительным.
. Такой угол а считается положительным.
При вращении (в направлении против движения часовой стрелки) подвижный радиус-вектор описывает углы от 0° до З60° (определение градуса см. в п. 165). Осями координат круг на рис. 79 делится на четыре четверти: первая четверть АОВ, вторая BОС, третья COD и четвертая DOА. Если сторона ОЕ угла АОЕ расположена в первой, второй, третьей или четвертой четверти, то угол АОЕ будем называть соответственно углом первой, второй, третьей или четвертой четверти. В первой четверти угол  изменяется в пределах от 0° до 90°
изменяется в пределах от 0° до 90°  , во второй—от 90° до 180°
, во второй—от 90° до 180°  , в третьей—от 180° до 270°
, в третьей—от 180° до 270°  , в четвертой—от 270° до 360°
, в четвертой—от 270° до 360°  .
.
Если подвижный радиус-вектор описал угол АОЕ, равный угловым градусам, то его конец описал дугу окружности  , равную дуговым градусам. Начало этой дуги находится в точке А, а конец — в точке Е. Все сказанное выше об углах относится и к дугам.
, равную дуговым градусам. Начало этой дуги находится в точке А, а конец — в точке Е. Все сказанное выше об углах относится и к дугам.
Углы и дуги, большие 360°
Мы ограничивались углами от 0° до 360°. Между тем в различных задачах приходится иметь дело с вращениями, при которых совершается больше полного оборота, например с вращением маховика, с полетом спутника вокруг Земли и т. д. Эти задачи приводят к необходимости обобщения понятия угла (дуги), к необходимости введения углов (дуг), больших 360°. Рассмотрим угол  , где
, где  (рис. 79). Этот угол может быть образован следующим образом: подвижный радиус-вектор из своего первоначального положения сделал сначала n полных оборотов в направлении против движения часовой стрелки, а потом еще повернулся на угол а в том же направлении, и мы получили некоторый положительный угол который связан с прежним углом а следующей формулой:
(рис. 79). Этот угол может быть образован следующим образом: подвижный радиус-вектор из своего первоначального положения сделал сначала n полных оборотов в направлении против движения часовой стрелки, а потом еще повернулся на угол а в том же направлении, и мы получили некоторый положительный угол который связан с прежним углом а следующей формулой:

где и n — любое целое неотрицательное число. Угол  (при
(при  и
и  ) будем называть положительным углом, большим 360° (при n = 1 и = 0 получаем угол, равный 360°). Существует бесконечное множество углов с начальной стороной и конечной стороной , которые записываются при помощи формулы (95.1). Например:
) будем называть положительным углом, большим 360° (при n = 1 и = 0 получаем угол, равный 360°). Существует бесконечное множество углов с начальной стороной и конечной стороной , которые записываются при помощи формулы (95.1). Например:

Если подвижный радиус-вектор описал угол  , то его конец описал дугу, равную сумме целого числа n полных окружностей и дуги . Существует бесконечное множество дуг, имеющих данное начало А и данный конец Е. Все эти дуги также выражаются формулой (95.1), но градусы, входящие в эту формулу, следует понимать как дуговые.
, то его конец описал дугу, равную сумме целого числа n полных окружностей и дуги . Существует бесконечное множество дуг, имеющих данное начало А и данный конец Е. Все эти дуги также выражаются формулой (95.1), но градусы, входящие в эту формулу, следует понимать как дуговые.
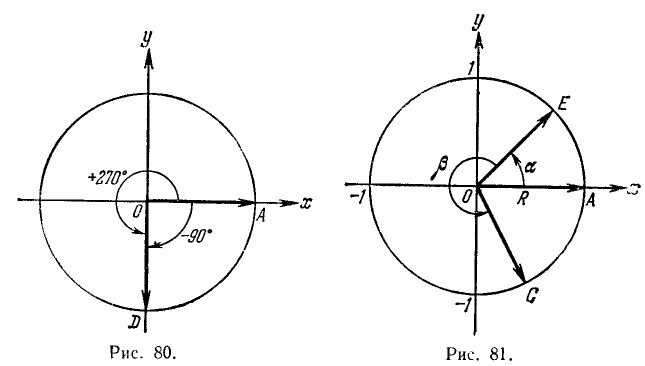
Отрицательные углы. Сложение и вычитание углов
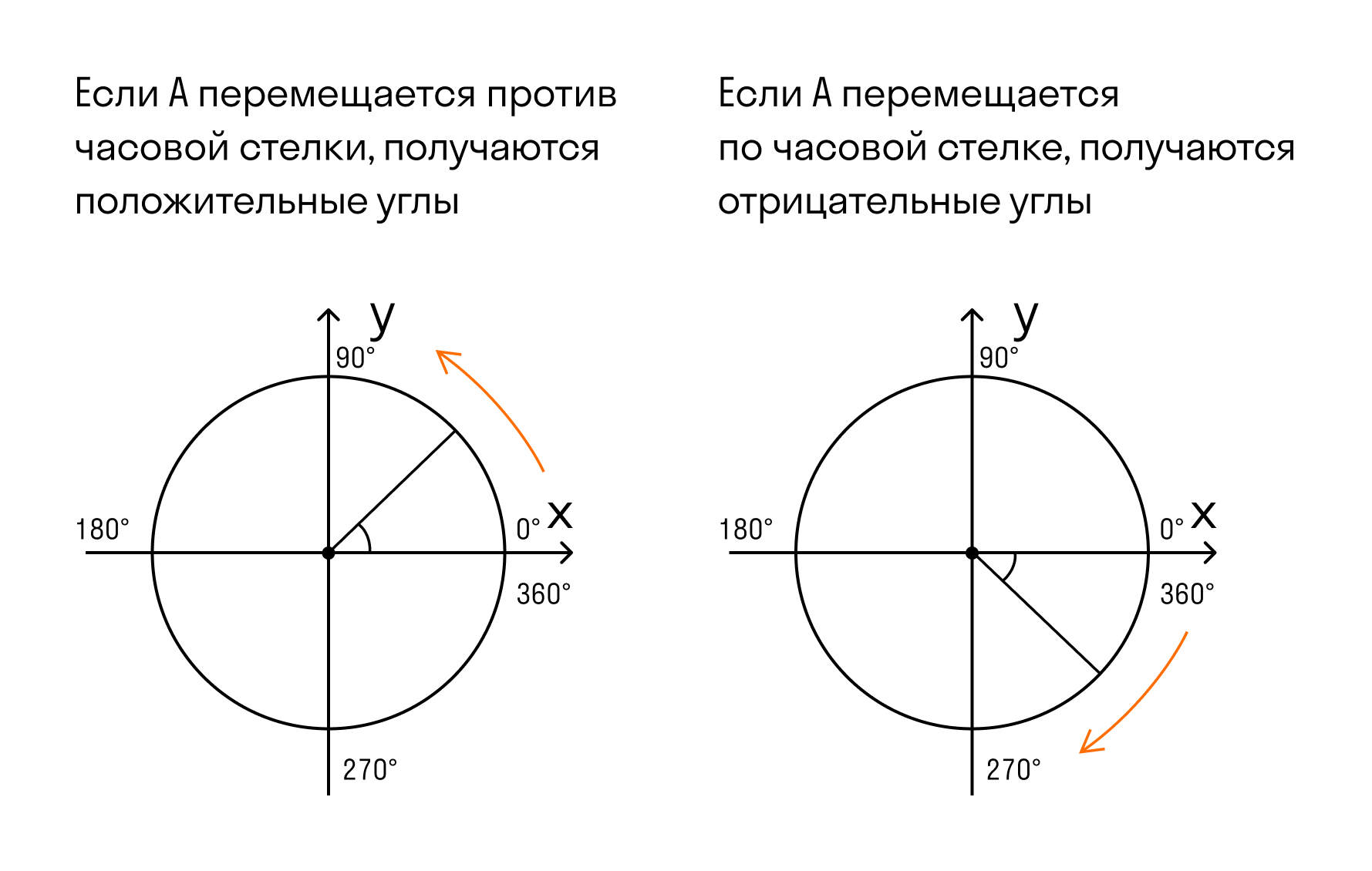
Назовем вращение подвижного радиуса-вектора в направлении против движения часовой стрелки положительным, а в противоположном направлении (в направлении по движению часовой стрелки) — отрицательным. Угол, описанный при отрицательном вращении подвижного радиуса-вектора, назовем отрицательным углом.
Правило. Угол измеряется положительным числом, если он положительный, и отрицательным числом, если он отрицательный.
Пример:
На рис. 80 изображены два угла с общей начальной стороной и общей конечной стороной  : один равен +270°, другой —90°.
: один равен +270°, другой —90°.
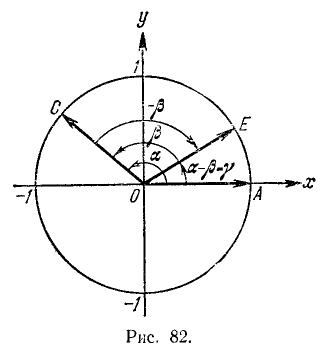
Сумма двух углов. Па координатной плоскости Оху рассмотрим окружность единичного радиуса с центром в начале координат (рис. 81). Пусть произвольный угол (на чертеже положительный) получен в результате вращения некоторого подвижного радиуса-вектора от его начального положения , совпадающего с положительным направлением оси Ох, до его конечного положения . Примем теперь положение радиуса-вектора за начальное и отложим от него произвольный угол 
(на чертеже положительный), который получим в результате вращения некоторого подвижного радиуса-вектора от его начального положения до его конечного положения  . В результате этих действий мы получим угол, который будем называть суммой углов и . (Начальное положение подвижного радиуса-вектора , конечное положение радиуса-вектора ).
. В результате этих действий мы получим угол, который будем называть суммой углов и . (Начальное положение подвижного радиуса-вектора , конечное положение радиуса-вектора ).
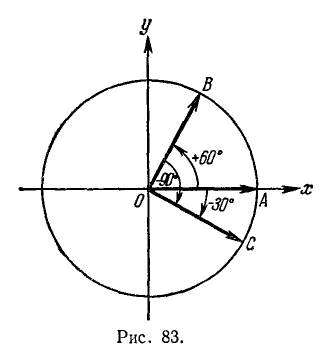
Разность двух углов. Под разностью двух углов и , которую обозначим  , мы будем понимать такой третий угол
, мы будем понимать такой третий угол  , который в сумме с углом дает угол , т. е.
, который в сумме с углом дает угол , т. е.  , если
, если  . Разность двух углов и можно трактовать как сумму углов и
. Разность двух углов и можно трактовать как сумму углов и  . В самом деле,
. В самом деле,  (рис. 82). Вообще, для любых углов их сумма измеряется алгебраической суммой действительных чисел, измеряющих эти углы.
(рис. 82). Вообще, для любых углов их сумма измеряется алгебраической суммой действительных чисел, измеряющих эти углы.
Пример:
 , a
, a  , тогда
, тогда

Пример:
Угол 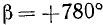 , а угол
, а угол  . Сумма их
. Сумма их

В формуле (95.1) предполагалось, что n — любое целое неотрицательное число. Если же предположить, что n —любое целое число (положительное, отрицательное или нуль), то при помощи формулы

где  , n = 0, ±1, ±2, …, можно будет записать любой угол, как положительный, так и отрицательный.
, n = 0, ±1, ±2, …, можно будет записать любой угол, как положительный, так и отрицательный.
Пример:
Угол, равный —1370°, можно записать так:
—1370° = 360° (—4)+ 70°.
Здесь n = —4, = +70°.
Заметим, что все углы , записанные при помощи формулы (96.1), при разных значениях n, но одном и том же а, имеют общие начальную () и конечную () стороны (рис. 79). Поэтому построение любого угла сводится к построению соответствующего неотрицательного угла , меньшего 360°. На рис. 79 углы  между собой не отличаются, они различаются лишь процессом вращения радиуса-вектора, который привел к их образованию.
между собой не отличаются, они различаются лишь процессом вращения радиуса-вектора, который привел к их образованию.
Тригонометрические функции произвольного угла
Определение основных тригонометрических функций: Было дано общее определение функциональной зависимости (общее определение функции) и изучались некоторые элементарные функции. Теперь мы введем основные тригонометрические функции.
Пусть радиус-вектор  точки М образует угол с осью Ох (рис. 84), причем х и у соответственно абсцисса и ордината конца М вектора, r — его модуль, а величина угла измеряется в градусах или в радианах (см. пп. 165, 166).
точки М образует угол с осью Ох (рис. 84), причем х и у соответственно абсцисса и ордината конца М вектора, r — его модуль, а величина угла измеряется в градусах или в радианах (см. пп. 165, 166).
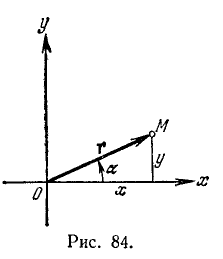
1 . Синусом угла (обозначение: sin а) называется отношение ординаты у (см. рис. 84) к длине г радиуса-вектора  :
:

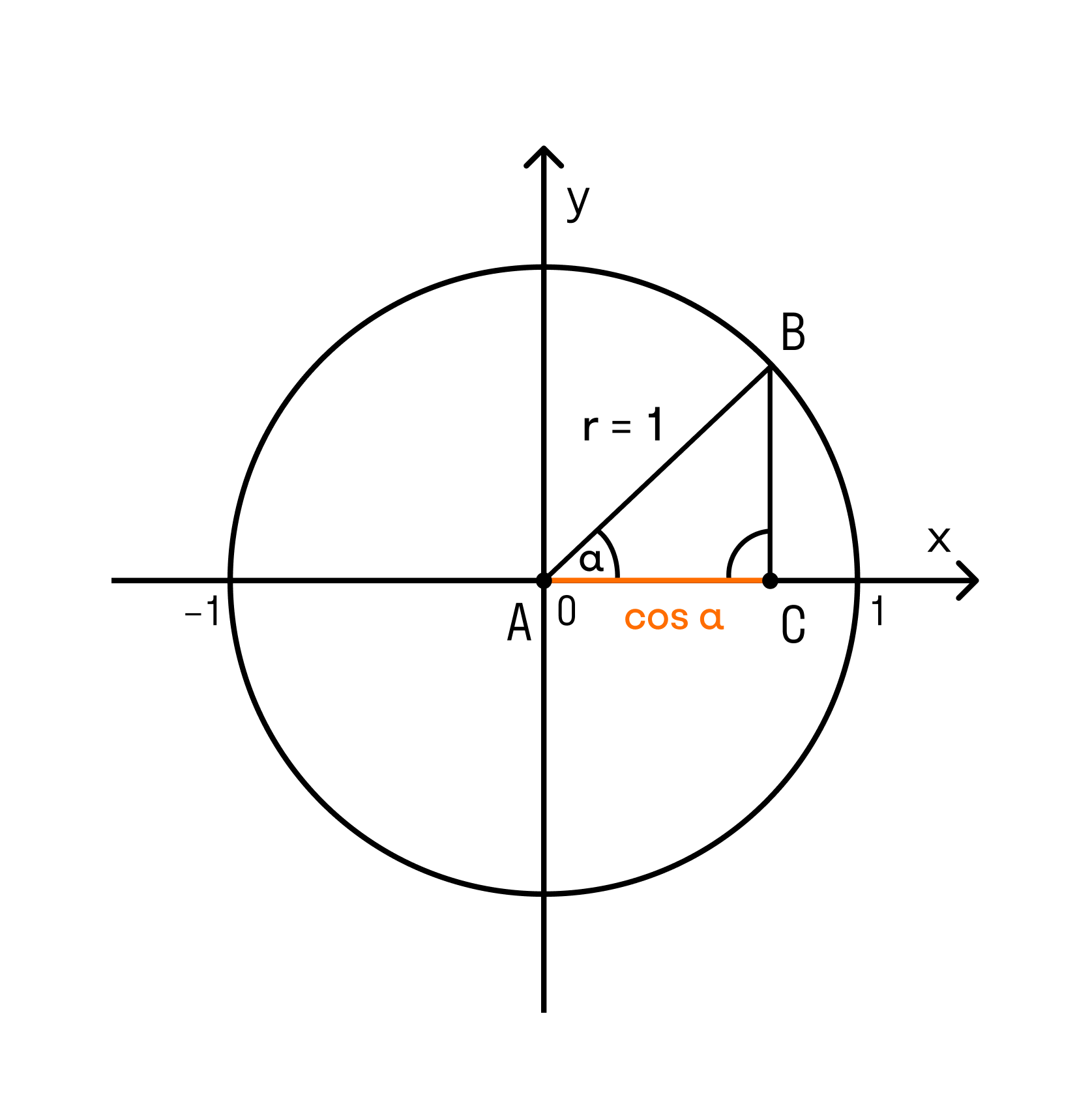
2. Косинусом угла (обозначение: cos a) называется отношение абсциссы х к длине r радиуса-вектора :

Ниже (замечание 1) мы покажем, что sin а и cos а, определенные равенствами (97.1) и (97.2), действительно зависят лишь от угла а (но не от радиуса окружности r).
3. Тангенсом угла а (обозначение: tg a) называется отношение синуса угла а к косинусу этого угла:

4. Котангенсом угла а (обозначение: ctg a) называется отношение косинуса угла а к синусу этого угла:

5. Секансом угла a (обозначение: sec а) называется величина, обратная cos а:

6. Косекансом угла а (обозначение: cosec a) называется величина, обратная sin а:

Замечание:
Тригонометрические функции (97.1) — (97.6) действительно являются функциями только угла а, т. е. не зависят от длины подвижного радиуса-вектора. Для того чтобы в этом убедиться, достаточно доказать, что если подвижный радиус-вектор r образует с осью абсцисс данный угол а, то отношения х/r и у/r не зависят от длины радиуса-вектора; читатель легко в этом убедится.
Замечание:
Из определения tg a и ctg a следует, что

Соотношения (97.7) и (97.8) можно было бы принять в качестве определений для tg a и ctg a.
Замечание:

Соотношения (97.9) и (97.10) можно было качестве определений для sec а и cosec a.
Замечание 4. Во всех определениях (97.1) — (97.6) мы предполагаем, что соответствующие отношения существуют (имеют смысл). Например, tg a имеет смысл, если  , ctg a имеет смысл, если
, ctg a имеет смысл, если  , и т.д. Поскольку (замечание 1) тригонометрические функции (97.1) — (97.6) угла а не зависят от длины подвижного радиуса-вектора, то в качестве радиуса-вектора можно брать вектор с длиной, равной единице (|r| = r = 1). Такой вектор называют единичным радиусом-вектором.
, и т.д. Поскольку (замечание 1) тригонометрические функции (97.1) — (97.6) угла а не зависят от длины подвижного радиуса-вектора, то в качестве радиуса-вектора можно брать вектор с длиной, равной единице (|r| = r = 1). Такой вектор называют единичным радиусом-вектором.
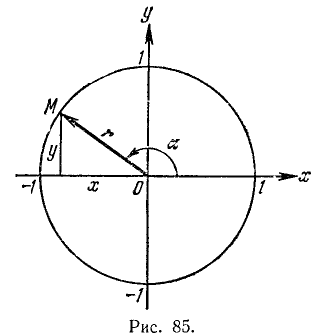
В случае единичного радиуса-вектора формулы для основных тригонометрических функций запишутся так (рис. 85):

Формулы для tg a и ctg a остались прежними (см. (97,7) и (97.8)), а формулы для остальных основных тригонометрических функций приняли более простой вид (см. (97.1), (97.2), (97.9) и (97.10)). Следовательно, синус и косинус угла а равны соответственно ординате и абсциссе конца подвижного единичного радиуса-вектора.
Конец этого единичного радиуса-вектора при изменении угла а от 0° до 360° опишет окружность, называемую единичной окружностью (рис. 85). Для геометрического истолкования тангенса и котангенса вводят понятия оси тангенсов и оси котангенсов.
Осью тангенсов называется перпендикуляр, восставленный в точке А к неподвижному радиусу-вектору  . Положительное и отрицательное направления на оси тангенсов выбирают так, чтобы они совпадали с соответствующими направлениями оси ординат (рис. 86).
. Положительное и отрицательное направления на оси тангенсов выбирают так, чтобы они совпадали с соответствующими направлениями оси ординат (рис. 86).
Рассмотрим угол  и введем понятие соответствующей точки оси тангенсов.
и введем понятие соответствующей точки оси тангенсов.
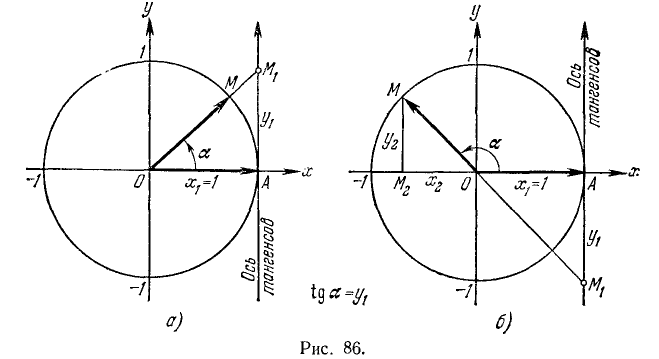
а) Если точка М единичной окружности лежит справа от оси ординат, то соответствующей ей точкой оси тангенсов назовем точку  , (точку пересечения продолжения ОМ с осью тангенсов, рис. 86, а).
, (точку пересечения продолжения ОМ с осью тангенсов, рис. 86, а).
б) Если точка М единичной окружности лежит слева от оси ординат, то соответствующей ей точкой сси тангенсов назовем точку  (точку пересечения продолжения МО с ссыо тангенсов, рис. 86, б).
(точку пересечения продолжения МО с ссыо тангенсов, рис. 86, б).
Заметим, что тангенс угла а численно равен ординате  , (рис. 86) соответствующей точки оси тангенсов, т. е. всегда
, (рис. 86) соответствующей точки оси тангенсов, т. е. всегда  . Докажем это для углов первых двух четвертей:
. Докажем это для углов первых двух четвертей:
1) 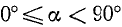 (рис. 86, а).
(рис. 86, а).  , где —ордината точки .
, где —ордината точки .
2)  (рис. 86, б).
(рис. 86, б).  , где
, где  и
и  — абсцисса и ордината точки М. Из подобия прямоугольных треугольников
— абсцисса и ордината точки М. Из подобия прямоугольных треугольников  и
и  имеем
имеем

Следовательно,  .
.
Заметим еще следующее:
а) если точка М лежит на оси ординат (например, а = 270°), то соответствующей ей точки оси тангенсов не существует, но при этом и tg a также не существует;
б) в рассмотренных случаях 1) — 4) мы брали угол а в пределах от 0° до 360°, но в наших рассуждениях ничего не изменится, если мы будем предполагать угол а любым.
Осью котангенсов называется перпендикуляр, восставленный в точке В (конец радиуса-вектора  , образующего с осью Ох угол, равный 90°) к оси ординат.
, образующего с осью Ох угол, равный 90°) к оси ординат.
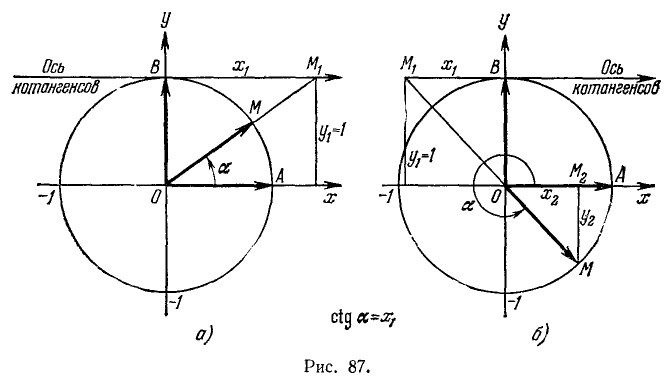
Положительное и отрицательное направления на оси котангенсов выбирают так, чтобы они совпадали с соответствующими направлениями оси абсцисс (рис. 87). Введем понятие соответствующей точки оси котангенсов.
а) Если точка М единичной окружности лежит над осью абсцисс, то соответствующей ей точкой оси котангенсов назовем точку (точку пересечения продолжения ОМ с осью котангенсов, рис. 87, а).
б) Если точка М единичной окружности лежит под осью абсцисс, то соответствующей ей точкой оси котангенсов назовем точку (точку пересечения продолжения МО с осью котангенсов, рис. 87,б).
Аналогично предыдущему можно получить, что котангенс угла а равен абсциссе х, соответствующей точки оси котангенсов, т.е.  . Если точка М лежит на оси абсцисс (например, а = 180°), то соответствующей ей точки оси котангенсов не существует, но при этом и ctg а также не существует.
. Если точка М лежит на оси абсцисс (например, а = 180°), то соответствующей ей точки оси котангенсов не существует, но при этом и ctg а также не существует.
Изменение основных тригонометрических функций при изменении угла от 0 до 2 пи
Изменение основных тригонометрических функций при изменении угла от 0 до  .
.
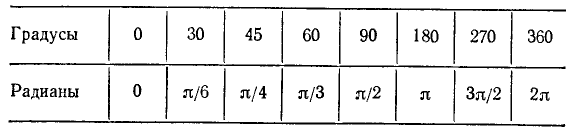
В дальнейшем мы будем использовать не только градусную, но и радианную меру углов (см. п. 166); радианное измерение углов станет особенно важным при переходе к тригонометрическим функциям числового аргумента (п. 107). В связи с этим напомним некоторые факты из геометрии, относящиеся к градусной и радианной системам измерения углов и дуг:
1) при измерении углов и дуг в радианной системе наименование единицы измерения — радиана обычно опускают и говорят, например, «угол равен  » вместо «угол равен радиана»; «угол равен 1000» вместо «угол равен 1000 радиан»;
» вместо «угол равен радиана»; «угол равен 1000» вместо «угол равен 1000 радиан»;
2) при переходе от градусной меры (а градусов) к радианной мере (а радиан) пользуются формулой

3) при переходе от радианной меры (а радиан) к градусной мере (а градусов) пользуются формулой

Полезно запомнить соответствующие значения в градусной и радианной мере некоторых наиболее часто встречающихся углов, приведенные в следующей таблице.
Рассмотрим теперь, как изменяется (по абсолютной величине и знаку) каждая из основных тригонометрических функций при изменении угла а от 0 до . За их изменением проследим, пользуясь единичной окружностью (см. п. 97).
I. sin а. Согласно первой формуле (97.11) sin a = у, где у — ордината конца подвижного единичного радиуса-вектора (см. рис. 85).
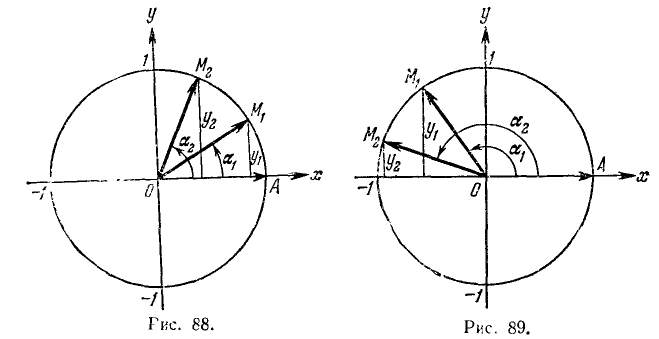
1)  (первая четверть). Если углы
(первая четверть). Если углы  и
и  удовлетворяют неравенствам
удовлетворяют неравенствам  (рис. 88), то
(рис. 88), то  следовательно, и
следовательно, и  . При возрастании угла a от 0 до
. При возрастании угла a от 0 до  sin а монотонно возрастает от 0 до 1.
sin а монотонно возрастает от 0 до 1.
2)  (вторая четверть). Если углы и удовлетворяют неравенствам
(вторая четверть). Если углы и удовлетворяют неравенствам  (рис. 89), то
(рис. 89), то  , следовательно, и
, следовательно, и  . При возрастании угла а от до
. При возрастании угла а от до  sin а монотонно убывает от 1 до 0.
sin а монотонно убывает от 1 до 0.
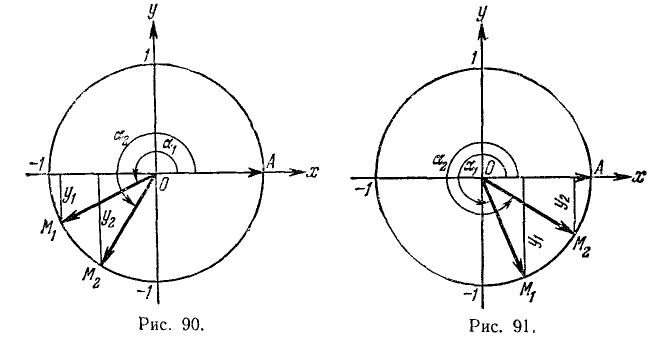
3)  (третья четверть). При возрастании угла
(третья четверть). При возрастании угла  от до
от до  sin а монотонно убывает
sin а монотонно убывает  от 0 до —1 (рис. 90).
от 0 до —1 (рис. 90).
4)  (четвертая четверть). При возрастании утла
(четвертая четверть). При возрастании утла  от до sin а монотонно возрастает
от до sin а монотонно возрастает  от —1 до 0 (pиc. 91).
от —1 до 0 (pиc. 91).
Вывод. При любом угле а абсолютная величина sin а не превосходит 1, что записывается так:

или в равносильной форме:

II. cos а. По второй формуле (97.11) cos a = x, где х — абсцисса конца подвижного единичного радиуса-вектора (рис. 85).
1)  (первая четверть). Для углов и , удовлетворяющих неравенствам
(первая четверть). Для углов и , удовлетворяющих неравенствам  (рис. 92, а), выполняется неравенство
(рис. 92, а), выполняется неравенство  (
(  и
и  ), следовательно,
), следовательно,  . При возрастании угла а от 0 до cos а монотонно убывает от 1 до 0.
. При возрастании угла а от 0 до cos а монотонно убывает от 1 до 0.
2)  (вторая четверть). При возрастании угла
(вторая четверть). При возрастании угла  от
от  до
до  cos а монотонно убывает (
cos а монотонно убывает ( , где
, где  и
и  ) от 0 до —1 (рис. 92, а).
) от 0 до —1 (рис. 92, а).
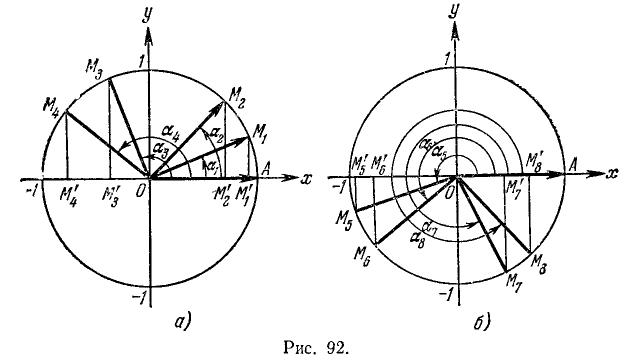
3)  (третья четверть). Для углов
(третья четверть). Для углов  и удовлетворяющих неравенствам
и удовлетворяющих неравенствам  (рис. 92, б), выполняется неравенство
(рис. 92, б), выполняется неравенство  (
(  и
и  ), следовательно,
), следовательно,  . При возрастании угла а от до cos а монотонно возрастает от —1 до 0.
. При возрастании угла а от до cos а монотонно возрастает от —1 до 0.
4)  (четвертая четверть). При возрастании угла
(четвертая четверть). При возрастании угла 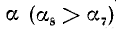 от до cos а монотонно возрастает (
от до cos а монотонно возрастает ( , где
, где  и
и  ) от 0 до 1 (рис. 92, б).
) от 0 до 1 (рис. 92, б).
Вывод. При любом угле а абсолютная величина cos а не превосходит 1, что записывается так:

или в равносильной форме:

III. tg a. Тангенс угла а численно равен ординате соответствующей точки оси тангенсов (см. п. 97).
1)  (первая четверть). Для углов и , удовлетворяющих неравенствам
(первая четверть). Для углов и , удовлетворяющих неравенствам  (рис. 93), выполняется неравенство
(рис. 93), выполняется неравенство  (
(  и
и  ), следовательно,
), следовательно,  . При возрастании угла а от 0 до tg a неограниченно возрастает. Заметим, что
. При возрастании угла а от 0 до tg a неограниченно возрастает. Заметим, что  не существует. Если угол а приближается к , оставаясь меньше , то tg a неограниченно возрастает (tg a стремится к плюс бесконечности).
не существует. Если угол а приближается к , оставаясь меньше , то tg a неограниченно возрастает (tg a стремится к плюс бесконечности).
Сходное положение встречалось при изучении функции у = 1/х; если х приближается к нулю, оставаясь больше нуля, то у = 1/х стремится к плюс бесконечности.
Это же условно записывают так:

2)  (вторая четверть). Для углов и , удовлетворяющих неравенствам
(вторая четверть). Для углов и , удовлетворяющих неравенствам  (рис. 94), выполняется неравенство
(рис. 94), выполняется неравенство  (
(  и
и  ), следовательно,
), следовательно,  . При возрастании угла а от до tg a возрастает до нуля.
. При возрастании угла а от до tg a возрастает до нуля.
Если а стремится к , оставаясь больше , то tg a неограниченно возрастает по абсолютной величине, оставаясь отрицательным (tg a стремится к минус бесконечности). Это записывается так:

3)  (третья четверть). Тангенс ведет себя так же, как и в первой четверти, т. е. возрастает от 0 до
(третья четверть). Тангенс ведет себя так же, как и в первой четверти, т. е. возрастает от 0 до  .
.
Если а стремится к , оставаясь меньше , то tg a стремится к плюс бесконечности:

4)  (четвертая четверть). Тангенс ведет себя так же, как и во второй четверти, т. е. возрастает от
(четвертая четверть). Тангенс ведет себя так же, как и во второй четверти, т. е. возрастает от  до 0. Р екомендуем читателю сделать соответствующий рисунок, аналогичный рис. 94.
до 0. Р екомендуем читателю сделать соответствующий рисунок, аналогичный рис. 94.
Если а стремится к , оставаясь больше , то tg a стремится к минус бесконечности:

IV. ctg a. Котангенс угла а численно равен абсциссе соответствующей точки оси котангенсов (см. п. 97).
1)  (первая четверть). Для углов и , удовлетворяющих неравенствам
(первая четверть). Для углов и , удовлетворяющих неравенствам  (рис. 95), выполняется неравенство
(рис. 95), выполняется неравенство  (
(  и
и  ), следовательно,
), следовательно,  . При возрастании угла а от 0 до ctg a убывает до нуля. Если а стремится к нулю, оставаясь больше нуля, то ctg a стремится к плюс бесконечности:
. При возрастании угла а от 0 до ctg a убывает до нуля. Если а стремится к нулю, оставаясь больше нуля, то ctg a стремится к плюс бесконечности:

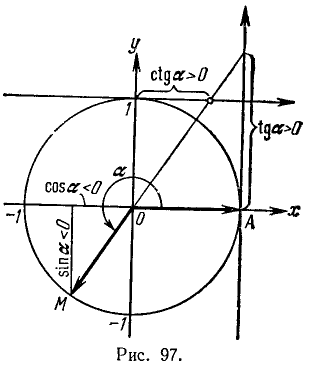
2)  (вторая четверть). Для углов и , удовлетворяющих неравенствам
(вторая четверть). Для углов и , удовлетворяющих неравенствам  (рис. 96), выполняется неравенство
(рис. 96), выполняется неравенство  (
(  и
и  ), следовательно,
), следовательно,  . При возрастании угла а от до ctg a убывает от 0 до
. При возрастании угла а от до ctg a убывает от 0 до  . Если а стремится к , оставаясь меньше , то ctg a стремится к минус бесконечности:
. Если а стремится к , оставаясь меньше , то ctg a стремится к минус бесконечности:

Разбор поведения ctg a в остальных четвертях предоставляется читателю. Приведем только окончательные результаты:
3)  (третья четверть). ctg a убывает от до 0; при
(третья четверть). ctg a убывает от до 0; при  , где
, где  ,
,  .
.
4)  (четвертая четверть), ctg a убывает от 0 до ; при
(четвертая четверть), ctg a убывает от 0 до ; при  , где
, где  ,
,  .
.
Соотношения между тригонометрическими функциями одного и того же угла
Основные тригонометрические тождества: Между основными тригонометрическими функциями произвольного угла а имеются следующие тождественные соотношения:

Доказательство. Принимая |r| = r = 1, получим (для произвольного угла a) sin а = у, cos a = x, где х и y — проекции единичного радиуса-вектора на оси координат (см. рис. 85). По теореме Пифагора (см. п. 216)  , так как |r|=1, откуда
, так как |r|=1, откуда

где 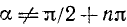 ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .

где  ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .
Тождества (99.2) и (99.3) служат соответственно определениями функций tg a и ctg a (см. формулы (97.3) и (97.4)).

где  ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .

где  ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .
Тождества (99.4) и (99.5) служат соответственно определениями функций sec а и cosec а (см. формулы (97.5) и (97.6)).
Тождества (99.1)—(99.5) назовем основными. При помощи этих основных тождеств выведем так называемые дополнительные тождества.
6. Перемножив почленно тождества (99.2) и (99.3), получим

где  ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .
7. Разделив тождество (99.1) почленно на  , при условии, что
, при условии, что  , получим
, получим

где  ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .
8. Разделив тождество (99.1) почленно на  , при
, при  условии, что sin а Ф 0, получим
условии, что sin а Ф 0, получим

где  ; n = 0, ±1, ±2, … .
; n = 0, ±1, ±2, … .
При помощи тождеств (99.1)—(99.8) можно производить преобразования различных выражений, содержащих тригонометрические функции, и получать новые тождества. Пример 1. Доказать тождество

Решение:
Заменив в левой части tg a и ctg a их выражениями по формулам (99.2) и (99.3), получим

После выполнения тождественных преобразований левая часть равенства совпала с правой. Исходное тождество этим доказано.
Это же тождество можно доказать и по-другому, воспользовавшись формулами (99.7) и (99.8), а затем формулами (99.4) и (99.5). Рекомендуем это сделать читателю.
Пример:

Решение:
Используя тождество (99.1), получаем



Подставив (99.9) и (99.10) в (*), будем иметь

Вычисление значений тригонометрических функций по значению одной из них
При помощи формул (99.1)—(99.8) можно выразить (с точностью до знака) через любую из шести тригонометрических функций угла а остальные пять функций. Мы ограничимся только функциями sin a, cos а и tg a.
1 . Выражение через sin а. Из тождества (99.1) находим

Подставив найденное значение cos а в тождество (99.2), получим

где  ; n = 0, ±1, ±2, …
; n = 0, ±1, ±2, …
2. Выражение через cos а. Из тождества (99.1) находим

Подставив найденное значение sin а в тождество (99.2), получим

где  ; n = 0, ±1, ±2, …
; n = 0, ±1, ±2, …
3. Выражение через tg a. Из тождества (99.7) находим  . Подставив значение sec а в тождество (99.4), получим из него
. Подставив значение sec а в тождество (99.4), получим из него

где  ; n = 0, ±1, ±2, …
; n = 0, ±1, ±2, …

где ; n = 0, ±1, ±2, …
При извлечении квадратного корня знак следует выбирать в зависимости от того, в какой четверти находится угол а.
Пример:
Известно, что cos a = —3/5 и 180° 0, ctg a > 0, sin a 
В дальнейшем мы будем использовать следующий факт:
Для того чтобы два действительных числа х и у можно было принять за cos а и sin а одного и того же угла а, необходимо и достаточно, чтобы сумма их квадратов была равна единице:  .
.
Доказательство:
Необходимость. Если х = cos а и у = sin а, то по тождеству (99.1)  , т. е. .
, т. е. .
Достаточность. Рассмотрим радиус-вектор  (рис. 85) с проекциями х и у. Так как по условию , то длина этого вектора равна 1. Следовательно, —единичный радиус-вектор. Согласно первым двум формулам (97.11) sin а = у и cos a = x, где а — угол, образованный подвижным единичным радиусом-вектором и положительным направлением оси Ох.
(рис. 85) с проекциями х и у. Так как по условию , то длина этого вектора равна 1. Следовательно, —единичный радиус-вектор. Согласно первым двум формулам (97.11) sin а = у и cos a = x, где а — угол, образованный подвижным единичным радиусом-вектором и положительным направлением оси Ох.
Пример:
Могут ли sin а и cos а одного и того же угла a быть равными соответственно: а) 12/13 и —5/13; б) 1/3 и —2/3?
Решение:
а) Числа 12/13 и —5/13 обладают тем свойством, что  . Следовательно, по доказанному существует такой угол а, для которого sin a = 12/13 и cos a = —5/13.
. Следовательно, по доказанному существует такой угол а, для которого sin a = 12/13 и cos a = —5/13.
б) Для чисел 1/3 и —2/3 имеем  . Следовательно, числа 1/3 и —2/3 нельзя принять за sin а и cos a одного и того же угла а.
. Следовательно, числа 1/3 и —2/3 нельзя принять за sin а и cos a одного и того же угла а.
Значения тригонометрических функций некоторых углов
Воспользовавшись сведениями из геометрии, найдем значения тригонометрических функций углов 30°, 45° и 60° (или соответственно в радианной мере углов  ,
,  и
и  ).
).
1)  (рис. 98). На основании теоремы о том, что в прямоугольном треугольнике катет, лежащий против угла в 30°, равен половине гипотенузы, заключаем, что
(рис. 98). На основании теоремы о том, что в прямоугольном треугольнике катет, лежащий против угла в 30°, равен половине гипотенузы, заключаем, что
(поскольку r = 1). Воспользовавшись теперь формулами (100.1), (99.2) и (99.6), легко вычислим:
2)  (рис. 99). В данном случае проще начинать с вычисления тангенса:
(рис. 99). В данном случае проще начинать с вычисления тангенса:
ибо у = х. Воспользовавшись теперь формулами (100.5), (100.6) и (99.6), легко найдем:

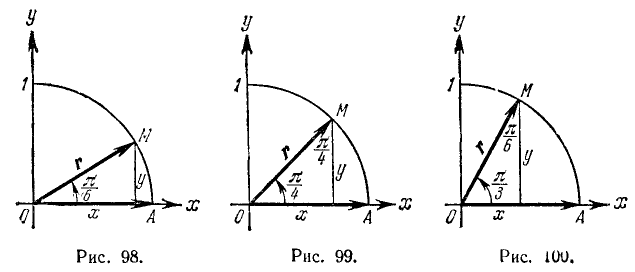
3)  (рис. 100). По определению косинуса
(рис. 100). По определению косинуса  . В нашем случае х = 1/2, следовательно,
. В нашем случае х = 1/2, следовательно,
Далее воспользуемся формулами (100.3), (99.2) и (99.6):
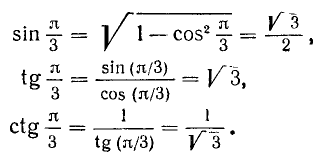
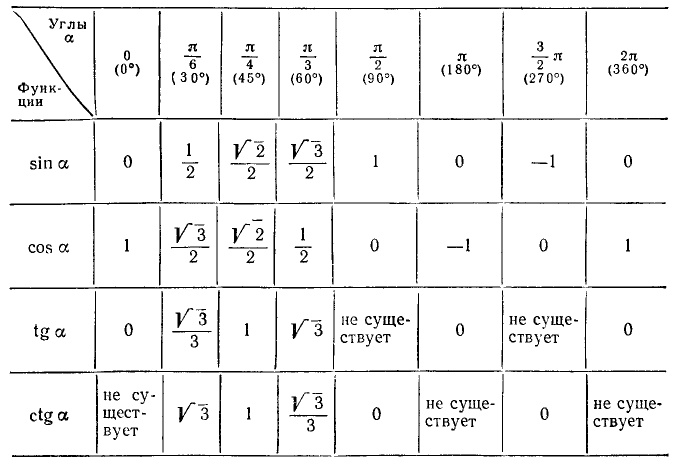
Присоединяя к полученным результатам результаты п. 98, составим следующую таблицу значений тригонометрических функций некоторых часто встречающихся углов.
О поведении tga a окрестности  ,
,  и
и  в окрестности
в окрестности  ,
,  и
и  см. п. 98.
см. п. 98.
Четность, нечетность и периодичность тригонометрических функций
Четность и нечетность: Напомним (см. п. 33), что функция y = f(x) называется четной, если для всех допустимых значений аргумента х имеет место тождество
Функция y = f(x) называется нечетной, если для всех допустимых значений аргумента x имеет место тождество
Для тригонометрических функций справедлива следующая
Теорема:
Функции cos а и sec а являются четными, т.е.

а функции sin а, tg a, ctg a и cosec а являются нечетными, т. е.

Доказательство:
Рассмотрим два угла, образованных единичным радиусом-вектором r:  и
и  (рис. 101). Заметим, что абсцисса точек
(рис. 101). Заметим, что абсцисса точек  и
и  одна и та же (х).
одна и та же (х).
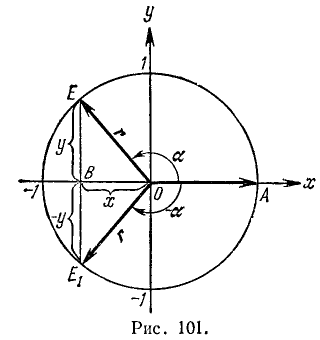
Согласно второй формуле (97.11) имеем cos a = x и cos (—а) = х, следовательно,
cos(—a) = cosa. (102.1)

Так как равенство (102.1) справедливо для любого угла а, то мы доказали, что cos (— a) = cos a.
Четность sec a (см. формулу (99.4)) доказывается так:


Заметим, далее, что ординаты точек и противоположны по знаку (ВЕ = у,  ). Согласно первой формуле (97.11) имеем sin a = у и sin(—a) = — у, следовательно,
). Согласно первой формуле (97.11) имеем sin a = у и sin(—a) = — у, следовательно,

Используя формулу (99.2), а также тождества (102.1) и (102.3), получим


Для доказательства нечетности ctg a воспользуемся тождествами (99.6) и (102.4):


Рекомендуем читателю доказать, что справедливо и тождество

Пример:
Найти значения тригонометрических функций угла  .
.
Решение:
Используя нечетность функций sin a, cosec а, tg a и ctg a, получим
Используя четность функций cos а и sec а, получим

Понятие периодической функции
Тригонометрические функции обладают свойством периодичности, которое определяется в общей форме следующим образом.
Определение. Функция f (х) называется периодической с периодом  , если для любого x выполнено условие: если функция определена в одной из точек х или х + Т, то она определена и во второй точке, и ее значения в обеих точках равны между собой:
, если для любого x выполнено условие: если функция определена в одной из точек х или х + Т, то она определена и во второй точке, и ее значения в обеих точках равны между собой:

Число Т называется в этом случае периодом функции f(x). Докажем следующее предложение:
Если Т — период функции f(x), mo и любое из чисел nТ, п = —1, ±2, … , также является периодом f(x).
Доказательство:
Прозедем сначала доказательство для —Т. Для этого рассмотрим пару значений аргумента х и х+(—Т)=х—Т. Из записи
видно (в силу определения периодичности), что если функция определена в одной из точек х—Т, х, то она определена и во второй точке. Далее устанавливаем равенство f/(х—T) = f(x):

Доказательство того, что nТ при натуральном n является периодом функции f(x), проведем по индукции (случай отрицательного n сводится к этому заменой Т на —Т). Итак, требуется установить, что если f(х) определена в одной из точек x, х + nТ,
то она определена и во второй точке, причем f (x) = f (х + nТ). Допустим, что утверждение теоремы уже доказано для некоторого n = k (оно, например, очевидно при n = 1). Докажем, что оно останется верным и для n = k + 1. Прежде всего, в силу того, что Т — период, замечаем, что если одно из значений аргумента x + kT и x + (k + l)T = (x + kT) + T принадлежит области определения функции, то ей принадлежит и второе значение. Так как, по предположению индукции, такое же положение справедливо и для пары точек х и x + kT, то видно, что точки х и х + (k + 1)T принадлежат (или не принадлежат) области определения f(х) одновременно. Далее устанавливаем равенство значений f(x) в точках x и x + (k + 1)T:

(последнее — по предположению индукции).
Доказано, что nТ — период функции при любом целом n. Наименьший положительный период функции (если он существует) называется основным периодом.
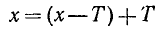
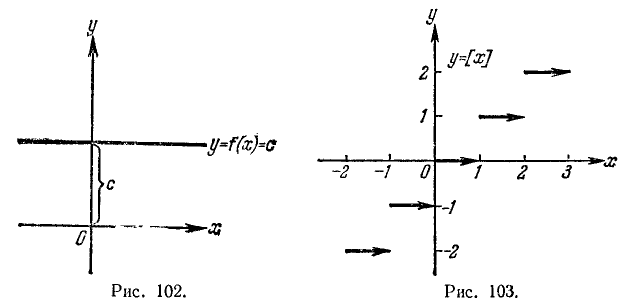
Пример:
Функция f(х) = с (с — постоянная величинa) имеет своим периодом любое число. Основного периода здесь нет. График этой функции изображен на рис. 102.
Пример:
Напомним, что целой частью числа х (обозначение: [x]) называется наибольшее целое число, не превосходящее х (п. 4). Целая часть х есть функция от х; ее график показан на рис. 103.
Дробной частью числа х (обозначение: (x)) мы назвали (п. 4) разность между х и его целой частью:
Дробная часть х является периодической функцией с основным периодом T = 1. Действительно,

и так как очевидно, что [x + 1] = [х] + 1,то

График дробной части х показан на рис. 104.
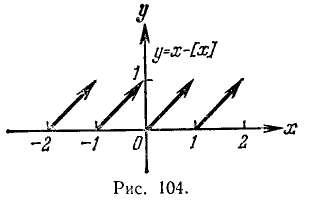
Пример:
а) Рассмотрим следующую функцию f(х), определенную для х, удовлетворяющих неравенствам  :
:

График функции изображен на рис. 105.
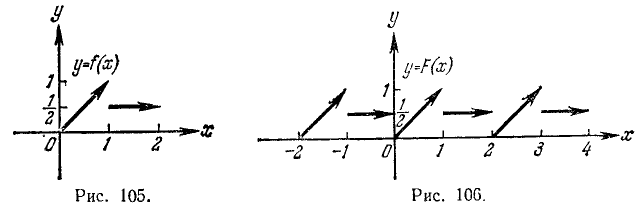
б) С помощью этой функции f(x), приняв за основной период число T = 2, построим периодическую функцию F (х):

График функции F (х) изображен на рис. 106.
Периодичность тригонометрических функций
Одним из важных свойств тригонометрических функций является свойство периодичности, с которым мы в общем виде познакомились в п. 103. Докажем следующую теорему о периодичности тригонометрических функций.
Теорема:
Тригонометрические функции sin a, cos а, tg a, ctg a, sec а и cosec а являются периодическими функциями, причем основной период функций sin a, cos a, sec а и cosec а равен  (360°), а основной период функций tg a и ctg a равен (180°)).
(360°), а основной период функций tg a и ctg a равен (180°)).
Пока мы рассматриваем тригонометрические функции угла, и период Т следует рассматривать как угол; это замечание сохраняет силу вплоть до п. 107, где вводятся тригонометрические функции числового аргумента.
Доказательство:
В пп. 95 и 96 мы ввели углы вида  , где
, где  и n — целое число (положительное, отрицательное или нуль). В радианной мере эти углы можно записать в виде
и n — целое число (положительное, отрицательное или нуль). В радианной мере эти углы можно записать в виде  , где
, где 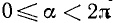 и n — любое целое число (положительное, отрицательное или нуль). Напомним, что все углы
и n — любое целое число (положительное, отрицательное или нуль). Напомним, что все углы  при разных значениях n, но одном и том же а имеют общие начальную
при разных значениях n, но одном и том же а имеют общие начальную  и конечную
и конечную  стороны (см. п. 96). Если воспользоваться первой из формул (97.11) для определения синуса, то получим
стороны (см. п. 96). Если воспользоваться первой из формул (97.11) для определения синуса, то получим

если воспользоваться второй из формул (97.11) для определения косинуса, то получим

так как соответствующие значения х и у для угла а и углов одинаковы (рис. 107).
Аналогичный результат получается и для других тригонометрических функций. Мы приходим к следующим формулам:
где n = 0, ±1, ±2, …
Этим уже доказано, что  является периодом для всех основных тригонометрических функций. Покажем, что для тангенса и котангенса справедливы также следующие формулы:
является периодом для всех основных тригонометрических функций. Покажем, что для тангенса и котангенса справедливы также следующие формулы:

где n = 0, ±1, ±2, ...
Рассмотрим два случая.
а) n = 2k, т. е. n — четное число (k = 0, ± 1, ±2, …). В этом случае имеем

Здесь мы использовали полученные ранее формулы (104.1),
б) n = 2k + 1, т. е. n—нечетное число (k = 0, ±1, ±2, …). В этом случае имеем

Здесь мы использовали формулы (104.1).
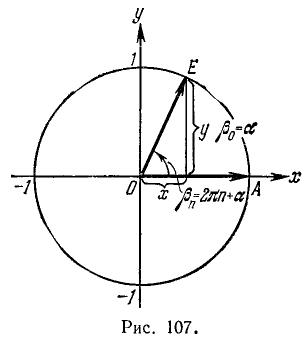
Из геометрических соображений (рис. 108) следует, что  и
и  где х и у — координаты конца подвижного единичного радиуса-вектора r, образующего с осью абсцисс угол a, a
где х и у — координаты конца подвижного единичного радиуса-вектора r, образующего с осью абсцисс угол a, a  и
и  — координаты конца подвижного единичного радиуса-вектора
— координаты конца подвижного единичного радиуса-вектора  , образующего с осью абсцисс угол а. Мы имеем
, образующего с осью абсцисс угол а. Мы имеем

Аналогично получаем  . Следовательно, при любом n = 0, ± 1, ±2, … имеем
. Следовательно, при любом n = 0, ± 1, ±2, … имеем
Для углов в градусной мере аналогичные формулы получим, заменив в формулах (104.1)  на 360°n и в формулах (104.2)
на 360°n и в формулах (104.2)  на 180°n. Этим доказано, что (или 180°) — период для функций tg a и ctg a. Остается доказать, что
на 180°n. Этим доказано, что (или 180°) — период для функций tg a и ctg a. Остается доказать, что  — основной период для sin a, cos a, sec a и cosec a, а — основной период для tg a и ctg a. Докажем это только для sin a, а для остальных основных пяти функций советуем это сделать читателю.
— основной период для sin a, cos a, sec a и cosec a, а — основной период для tg a и ctg a. Докажем это только для sin a, а для остальных основных пяти функций советуем это сделать читателю.
Доказательство:
Требуется показать, что  — наименьший положительный угол такой, что для всех а выполняется равенство sin (a + Т) = sin а. Проведем доказательство от противного. Допустим, например, что существует угол А такой, что
— наименьший положительный угол такой, что для всех а выполняется равенство sin (a + Т) = sin а. Проведем доказательство от противного. Допустим, например, что существует угол А такой, что

Так как в последнем равенстве а может быть любым (ведь это равенство, по предположению, выполняется тождественно), то должно выполняться, например, равенство

Но sin a = l только для аргументов а вида  , где n = 0, ±1, ±2, … . Следовательно, должно выполняться равенство
, где n = 0, ±1, ±2, … . Следовательно, должно выполняться равенство  , откуда следует, что
, откуда следует, что  . Мы пришли к противоречию, предположив, что
. Мы пришли к противоречию, предположив, что  .
.
Для sin а наше утверждение доказано. Аналогично оно доказывается и для других тригонометрических функций.
Зависимость между тригонометрическими функциями дополнительных углов
Углы  и
и  назовем дополнительными до
назовем дополнительными до  , если
, если  . Сходными (по названию) тригонометрическими функциями будем соответственно называть синус и косинус, тангенс к котангенс, секанс и косеканс.
. Сходными (по названию) тригонометрическими функциями будем соответственно называть синус и косинус, тангенс к котангенс, секанс и косеканс.
Теорема:
Сходные тригонометрические функции дополнительных углов равны между собой.
Доказательство:
Докажем сначала, что

Предположим для определенности, что  : тогда угол
: тогда угол  удовлетворяет неравенствам —
удовлетворяет неравенствам —  .
.
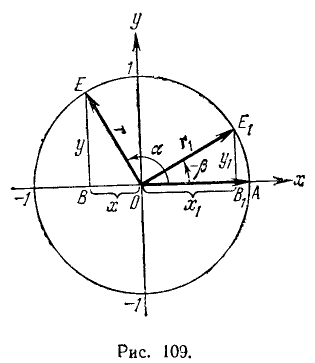
Построим теперь с помощью подвижного единичного радиуса-вектора r углы  и
и  (рис. 109). Заметим, что
(рис. 109). Заметим, что  (они прямоугольные, имеют равные гипотенузы
(они прямоугольные, имеют равные гипотенузы  и равные острые углы:
и равные острые углы:

Из равенства треугольников имеем  и
и  . Следовательно,
. Следовательно,

откуда  , но в силу нечетности синуса
, но в силу нечетности синуса  , и мы имеем
, и мы имеем  .
.
Аналогично доказывается, что  .
.
Для остальных функций можно доказательство вети так:

При выводе формул (105.3) и (105.4) мы пользовались только что доказанными формулами (105.1) и (105.2).
Замечание:
При доказательстве теоремы мы считали, что угол а задан в радианах. Соответствующие формулы для угла а, измеренного в градусной мере, легко получить из формул (105.1) —(105.4), заменив  на 90°.
на 90°.
Замечание:
При доказательстве теоремы мы предположили для определенности, что угол а удовлетворяет неравенствам  . Можно показать, что теорема остается в силе и в случае любого угла а (как положительного, так и отрицательного).
. Можно показать, что теорема остается в силе и в случае любого угла а (как положительного, так и отрицательного).
Пример:
Заменить данные тригонометрические функции тригонометрическими функциями дополнительного угла:



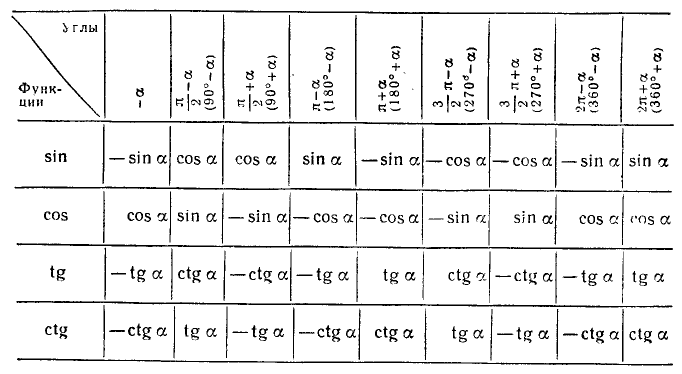
Формулы приведения
Формулами приведения называются формулы, выражающие тригонометрические функции углов  ,
,  ,
,  ,
,  ,
,  через тригонометрические функции угла а, где а — произвольный (допустимый) угол. Сами тригонометрические функции этих углов будем называть приводимыми тригонометрическими функциями. Будем говорить для краткости, что углы , , образованы откладыванием угла а от оси Ох (от горизонтальной оси), а углы и образованы откладыванием угла а от оси Оу (от вертикальной оси).
через тригонометрические функции угла а, где а — произвольный (допустимый) угол. Сами тригонометрические функции этих углов будем называть приводимыми тригонометрическими функциями. Будем говорить для краткости, что углы , , образованы откладыванием угла а от оси Ох (от горизонтальной оси), а углы и образованы откладыванием угла а от оси Оу (от вертикальной оси).
Пользуясь возможностью произвольного выбора угла а в формулах (105.1) — (105.4), получим новые важные формулы (мы ограничимся функциями sin a, cos a, tg a и ctg a).
а) Заменив в формулах (105.1)—(105.4) а на —а, получим
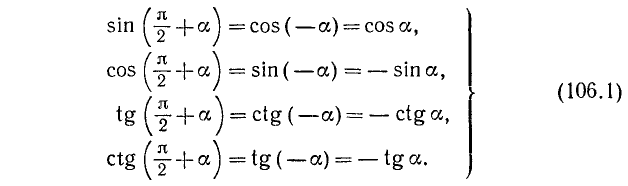
б) Заменив в формулах (106.1) a на  , а следовательно, на
, а следовательно, на  , получим
, получим

(мы снова воспользовались тем, что формулы (106.1) справедливы для произвольного угла а). Так как  является основным периодом для tg a и ctg a (см. п. 104), то
является основным периодом для tg a и ctg a (см. п. 104), то

в) Аналогично получим

Рекомендуем читателю доказать, что

г) Заменив в формулах (106.2) и (106.3) а на —а, получим

д) Заменив в формулах (106.4) и (106.5) а на —а, получим

е) В силу того, что  является периодом для всех основных тригонометрических функций, будем иметь
является периодом для всех основных тригонометрических функций, будем иметь

ж) Аналогично е), будем иметь

Рекомендуем читателю написать формулы, аналогичные формулам (106.1)—(106.8), для углов в градусной мере, заменив в последних  на 90°, на 180°,
на 90°, на 180°,  на 270° и на 360°.
на 270° и на 360°.
Пример:
Пользуясь формулами приведения, найти значения следующих тригонометрических функций (или выразить их через значения тригонометрических функций острых углов): а)  ; б)
; б)  ; в)
; в)  .
.
Решение:
а) 

 ;
;
б) 

 ;
;
в) 

 .
.
Пример:
Найти  , если
, если  .
.
Решение:

Сформулируем теперь общее правило приведения:
1) если угол а откладывается от вертикальной оси (углы  ,
,  ), то название приводимой функции меняется на сходное; если же угол а откладывается от горизонтальной оси (углы
), то название приводимой функции меняется на сходное; если же угол а откладывается от горизонтальной оси (углы  ,
,  ,
,  ), то название приводимой функции сохраняется;
), то название приводимой функции сохраняется;
2) если приводимая функция имеет отрицательное значение, то нужно соответствующую функцию угла а взять со знаком минус, если же приводимая функция имеет неотрицательное значение, то нужно соответствующую функцию угла а взять со знаком плюс.
Проиллюстрируем это правило на примере угла  . Заметим еще раз, что правило приведения справедливо для любого угла а, но для простоты запоминания и иллюстрации этого правила мы считаем а острым положительным углом.
. Заметим еще раз, что правило приведения справедливо для любого угла а, но для простоты запоминания и иллюстрации этого правила мы считаем а острым положительным углом.
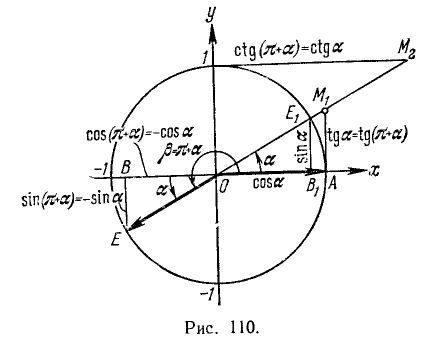
Итак, на рис. 110 угол  . Требуется выразить тригонометрические функции угла
. Требуется выразить тригонометрические функции угла  через тригонометрические функции острого положительного угла а. Заметим, что угол
через тригонометрические функции острого положительного угла а. Заметим, что угол  . Согласно правилу приведения нужно выяснить:
. Согласно правилу приведения нужно выяснить:
1) соответствующие названия тригонометрических функций; 2) знаки приводимых тригонометрических функций.
1) Так как угол а откладывается от горизонтальной оси (угол  имеет вид ), то названия приводимых функций сохраняются.
имеет вид ), то названия приводимых функций сохраняются.
2)  ,
,  .
.
Учитывая 1) и 2), имеем

так как  и
и  , то
, то

Мы пришли к формулам (106.2) и (106.3). Рекомендуем читателю проиллюстрировать на чертеже типа рис. 110 правило приведения для остальных углов ( ,
,  ,
,  ,
,  и
и  ). Мы формулировали определения и правило для случаев, когда углы измерялись в радианах, но все остается в силе, если всюду заменить
). Мы формулировали определения и правило для случаев, когда углы измерялись в радианах, но все остается в силе, если всюду заменить  на 90°, на 180°, на 270°, на 360°, а угол а считать заданным в градусной мере.
на 90°, на 180°, на 270°, на 360°, а угол а считать заданным в градусной мере.
Объединим полученные для формул приведения результаты в следующую таблицу.
Для произвольного угла  , где
, где  (см. формулу (96.1)), или
(см. формулу (96.1)), или  , где
, где  ; n = 0, ± 1, ±2, …, если угол дан в радианах, задача отыскания
; n = 0, ± 1, ±2, …, если угол дан в радианах, задача отыскания  ,
,  ,
,  ,
,  с помощью формул (104.1) и (104.2) сводится к отысканию тригонометрических функций угла а.
с помощью формул (104.1) и (104.2) сводится к отысканию тригонометрических функций угла а.
Пример:
Дан угол  . Найти , , и .
. Найти , , и .
Решение:
Представим данный угол в виде 
 . Применив формулы (104.1) и (104.2), получим
. Применив формулы (104.1) и (104.2), получим
Заметим, что тангенс и котангенс можно было бы вычислить и так:

Пример:
Найти , , и , если  .
.
Решение:
Представим данный угол в виде

Применив формулы (104.1), получим

Тангенс и котангенс найдем следующим образом:
Пример:
Имеем угол  . Найти , , и .
. Найти , , и .
Решение:
Представим данный угол в виде

Применив формулы (104.1) и (106.1), получим
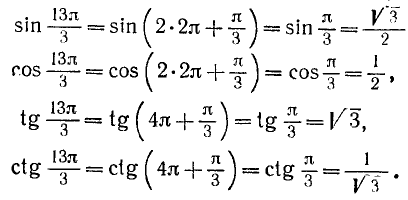
Пример:
Найти  .
.
Решение:

Пример:
Найти  .
.
Решение:

Пример:

Решение:
Применив формулы приведения, получим в левой части предполагаемого тождества


т. е. левая часть равна 1. Мы пришли к верному равенству, что и доказывает наше тождество.
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института