Часть 1. Законы эволюции
Двигатель – сердце самолета. За этой банальной фразой кроется глубокий смысл, однако она нуждается в некотором уточнении: это не только «сердце», но и «мышцы» летательного аппарата. Да, именно бортовая силовая установка обеспечивает работу электрических, гидравлических и других его «артерий», но её главное назначение создавать тягу – силу, необходимую для взлета, полета по заданному маршруту, выполнения всех видов маневров и посадки.
Моторы самых первых аэропланов работали на фиксированных оборотах, но как только появилась возможность регулирования их мощности, этот процесс стал неотъемлемой частью управления самолетом в целом.
С достижением сверхзвуковых скоростей и высот значение управления тягой для выдерживания заданной траектории резко возросло, поскольку на многих режимах полета управляющие моменты, создаваемые одними только рулевыми поверхностями, а иногда даже и подъемная сила крыла для этого стали уже недостаточны. Это особенно сильно чувствовалось в таких «пилотируемых ракетах», как советский перехватчик Су-9 Сухого, или американский Локхид F-104 «Старфайтер», не только высотно-скоростные качества которых, но их устойчивость и управляемость определялись в значительной мере именно тягой двигателя.
Весь облик таких самолетов был нацелен на достижение максимальных высот и скоростей, они должны были выполнить перехват сверхзвукового противника в стратосфере, двигаясь почти как баллистическая ракета – «на двигателе». Но практика показала ошибочность такого упрощённого подхода к ведению войны в воздухе. В 1970-е годы началась переоценка ценностей во взглядах на приоритеты в летно-тактических данных самолетов-истребителей. Их скорость и высотность больше не росли, а на первый план вновь вышли показатели маневренности и дальности полёта. Некоторые эксперты считали, что теперь не важно, какой будет двигатель, а главное – аэродинамика и весовое совершенство. Однако попытка установки на истребитель IV поколения F-16 одноконтурного двигателя III поколения J79-GE вместо ТРДДФ IV поколения F100-PW-200 привела к такому падению боевых свойств, что от него отказались даже страны «третьего мира». И никто больше не сомневается, что для самолета V поколения и двигатель нужен этого же поколения. Но каким он должен быть?

Новое поколение – новые задачи
В начале 1970-х гг. американская авиапромышленность создала тактические истребители F-15A и F-16A с очень высокими летными данными. Однако появившиеся в ответ советские МиГ-29 и Су-27 сохранили традиционное превосходство в ближнем бою и существенно сократили, а то и свели на нет отставание по дальности полета, возможностям управляемого вооружения и прицельного оборудования. Модернизация F-15 и F-16 ВВС США, как и палубных F-18, шла в направлении наращивания их ударного потенциала и их шансы в воздушном бою против обновленных МиГов и Су, особенно на малых дистанциях, сократились ещё более. Потому приступая к разработке следующего поколения истребителей, командование ВВС США во главу угла поставило именно летные данные.

Оно хотело получить устойчивое, сохраняемое длительное время преимущество над советскими самолетами в маневренности, что лишило бы ВВС СССР традиционного превосходства в ближнем бою над линией фронта и гарантировало бы решение задачи захвата господства в воздухе для обеспечения действий ударной авиации. Для этого и был нужен двигатель с управлением вектором тяги, объединенным с системой основного (аэродинамического) управления самолетом.
Вторым аспектом было одновременное сокращение времени реакции и повышения радиуса действия, что давало возможность быстро концентрировать авиацию на решающем направлении. Первое традиционно достигалось уменьшением времени подготовки к боевому вылету, но уже к середине 70-х гг. здесь резервы были исчерпаны. Трудозатраты по обслуживанию на один час полета самолета-истребителя достигли низшего возможного предела: для F-15A они сократились до 11,3 часа, что было вдвое ниже, чем на самолете F-4E, и в 2,8 раза ниже, чем на F-4C. Даже на 1 час полета поршневого истребителя Р-51 «Мустанг» времен II мировой войны надо было тратить 15 часов труда техсостава! Оставалось увеличивать крейсерскую скорость до сверхзвуковой – у F-15A, например, она была лишь 930 км/ч. Это попутно дало бы и тактические преимущества при вступлении в воздушный бой.
Чтобы увеличить радиус действия обычно старались снизить километровый расход топлива и увеличить объем баков. Дозаправка в полете не касается нашей темы, а эти пути непосредственно связаны с совершенствованием двигателей. Чтобы они тратили как можно меньше керосина на километр, повышали степень сжатия входящего воздуха в компрессоре, температуру в камере сгорания (перед турбиной), разделяли роторы на два (высокого и низкого давления), наконец, перешли на двухконтурные двигатели с форсажной камерой – ТРДДФ.
Но за выгоды ТРДДФ на дозвуковых крейсерских режимах приходилось платить ухудшением характеристик на режимах боевых, а проценты дальнейшего снижения расхода топлива давались все труднее. Оставалось убирать непроизводительные его потери, повышая точность регулирования режима работы, но это какие-то проценты, или же переходить на сверхзвуковой крейсерский режим.

Еще с начала 50-х гг. советские самолеты Су-7 и Су-9, или английские «Лайтнинг» могли ходить на сверхзвуке без включения форсажа, но и при этом их дальность все равно получалась очень маленькой. Форсажный крейсерский сверхзвуковой режим более был получен на МиГ-25 с низконапорными одноконтурными ТРДФ, а затем на МиГ-31 с ТРДДФ. Но радиус действия этих крупных и тяжелых машин был таким в основном не благодаря высокой экономичности двигателей, а за счет объема баков. Для маневренных истребителей этот путь не годился – нужны были принципиально новые конструкции авиационных двигателей.


И последним средством достижения превосходства в воздушном бою должна была стать концепция «первым увидел – первым выстрелил». Если ранее она реализовалась за счет большей дальности действия радиолокационной станции и ракет, то на поколении IV эти параметры у советских и американских истребителей сравнялись, и американцами ставка была сделана на ограничение демаскирующих признаков путем внедрения технологий «стелс» в конструкции и самолетов, и их силовых установок. В таком ключе в США были задуманы программы создания истребителей ATF и двигателей AFE поколения V.
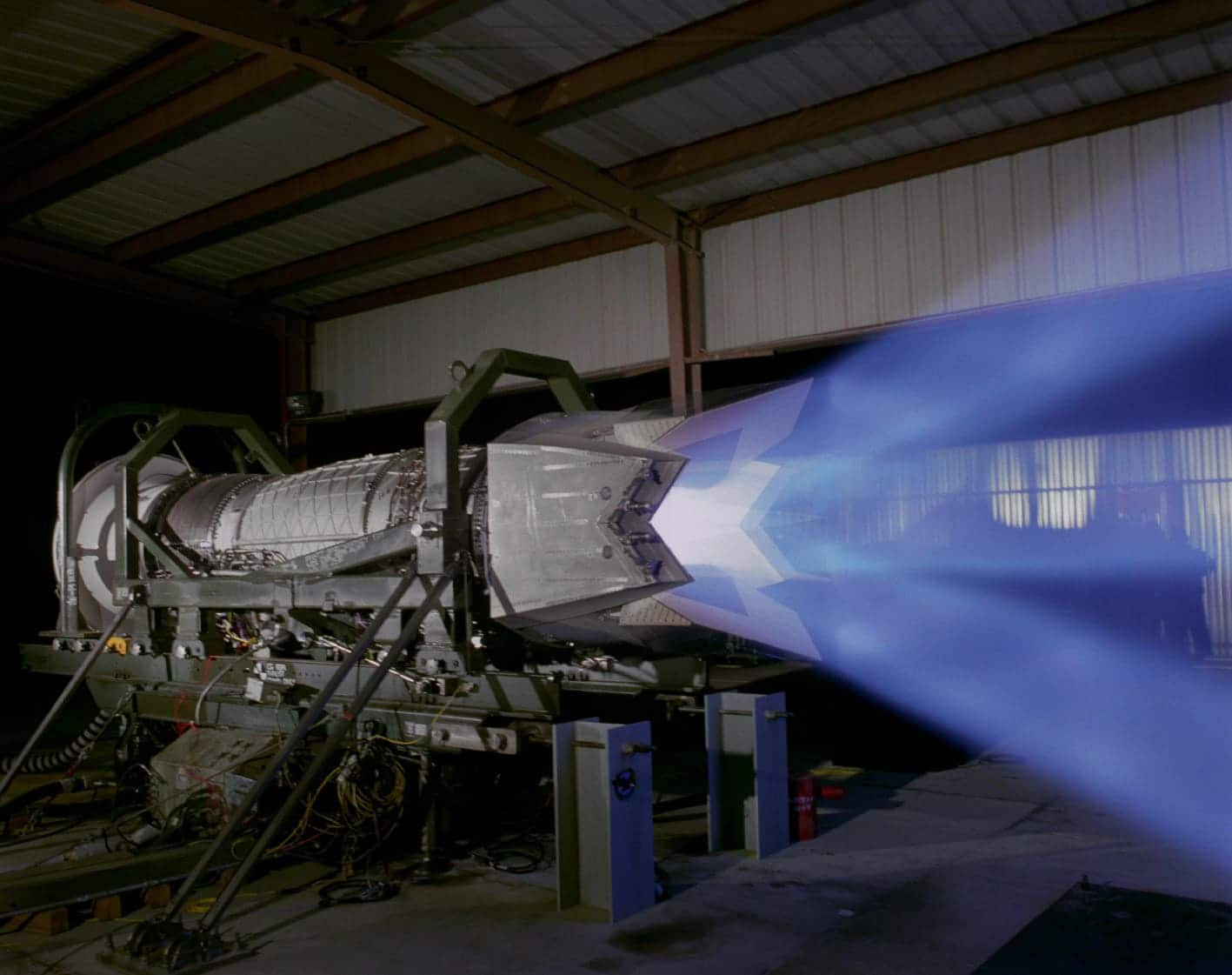
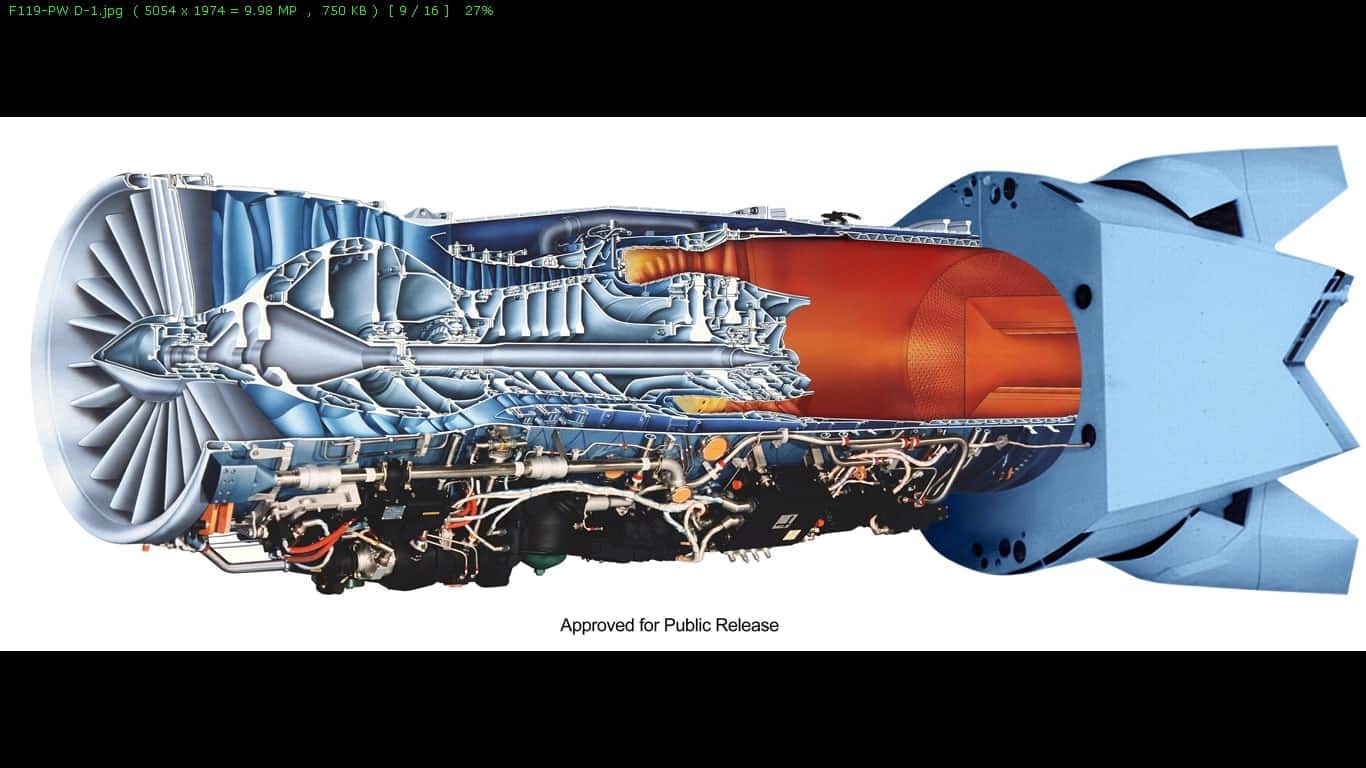
По итогам конкурса для серийного выпуска были отобраны истребитель F-22A «Раптор» концерна «Локхид – Мартин», о котором мы писали в № 4 и 5 нашего журнала за 2008 г., и двигатель Пратт-Уитни F119-PW-100. Он был рассчитан на крейсерский полет с числами М=0,8. 1,5 на высотах 60. 16000 м и на ведение маневренного воздушного боя при М=0,5. 1,8 на тех же высотах. При выполнении перехвата число М могло расти до 2,0. 2,2, а высота полета – до 18000 м.

Для советских истребителей V поколения Сухой С-22/С-32/С-37 и Микоян 1.44/1.42 были созданы двигатели Д30Ф9 и АЛ-41Ф, которые представляли собой глубокие модификации серийных ТРДДФ IV поколения Д30Ф6 и АЛ-31ФП. Зоны их крейсерских режимов должны были быть такими же, как и у «американца», но боевые были расширены вправо и вверх – до М=2,3. 2,5 и Н=18000. 22000 м с возможностью маневрирования там со значительными углами атаки и перегрузками.

Так получалось, что первый ход в создании IV и V поколений самолетов истребительной авиации делала Америка. Хорошо это или плохо для её вероятного противника – для СССР, а теперь для России? Конечно, что хорошего в постоянном отставании? Но с другой стороны такая ситуация позволяла перенимать готовые удачные решения и учитывать чужие ошибки, строя свой ответ с учетом их. Действительно, ни в одном из этих случаев Америке не удалось сделать так, чтобы её противник был вынужден пассивно следовать предложенным правилам игры и пытаться просто повторить то, что она делала, чтобы выдержать лишь симметричный паритет. Это касается и создания двигателей для самолетов истребительной авиации.
И первые советские истребители V поколения 1.44, разработанный ОКБ им. Микояна, и Сухой С-37, и сегодняшний Т-50, при всем сходстве поставленных задач и отдельных инженерных решений не являются попыткой повторить американский F-22 – об этом мы недавно подробно говорили. То же самое можно сказать и об их силовых установках.
Новые задачи – новые решения
Как только на самолетах III поколения, например, на F-111, стали видны недостатки ТРДДФ, начался поиск путей их устранения либо создания двигателей другой схемы. Конструкторы рассматривали силовые установки комбинированные и изменяемого цикла, одноконтурные многовальные ТРДФ, двигатели с выносными компрессорами («двухтрубные») и вовсе без форсажных камер и т.д., однако и сегодня большинство истребителей (за исключением F-35B с вертикальной посадкой – его ТРДДФ F135-PW-600 имеет выносное устройство вертикальной тяги и отклоняемое сопло – не путать с изменением вектора тяги для улучшения маневренности) всё ещё оснащены «обычными» ТРДДФ. Но их компоненты эволюционируют очень заметно, и именно это обеспечивает этому классу двигателей такое долголетие.
Естественно, пути этой эволюции в России и в США отличаются, что определяется различиями в поставленных задачах. Но вместе с тем в них есть и много общего. И в Америке, и в России при создании двигателей V поколения сохранились тенденции уменьшения двухконтурности при повышении степени сжатия в компрессоре, увеличения оборотов и температуры газов на выходе из основной камеры сгорания, а также роста удельных характеристик за счет и тяги без ограничения, а то и с наращиванием ресурса двигателя. Это достигается как обычно – путем улучшения способов смазки и охлаждения деталей, а также использованием новых материалов и технологий их обработки.
Рассматривались различные способы снижения массы и размеров двигателя как за счет более рациональной конструкции каждой детали, так и путем уменьшения числа ступеней компрессора и турбины. Если ротор ТРДДФ IV поколения в сумме имел 17. 14 ступеней, то на V поколении их только 11…12, но при этом не удалось сократить ни длину, ни массу двигателя, потому что «работали против этого» другие факторы, определившие их рост.
Например, значительное расширение области возможных режимов работы (как крейсерских, так и боевых) потребовало полной переделки компрессора, как элемента наиболее чувствительного к свойствам входящего потока.
Когда разработка двигателей V поколения только начиналась, большое внимание уделялось снижению эффективной площади рассеивания (ЭПР), демаскирующего признака при облучении радиолокатором. Намеревались делать лопатки из композитов со сложной внутренней макроструктурой, наносить на них радиопоглощающее покрытие или профилировать их так, чтобы отраженные сигналы взаимоподавлялись. Но все это оказалось слишком сложно, и обошлись «радар-блокером» – сравнительно простым подавляющим сигнал РЛС устройством, которое стоит перед входным направляющим аппаратом компрессора (ВНА) и за стабилизаторами пламени форсажных камер. Естественно, за малозаментость пришлось заплатить ухудшением газодинамики и увеличением веса, пусть и небольшим.

Можно ли обойтись без радар-блокеров как отдельных агрегатов и снизить ЭПР двигателя? Теоретически да – если найти такую форму устройств защиты воздухозаборников от попадания посторонних предметов и стабилизаторов пламени в форсажной камере, которая бы обеспечила совмещение разных функций в одном агрегате без существенной потери качества их исполнения и роста массы. Фактор материала здесь, по-видимому, мешать не будет – он один и тот же. Делается ли это? Не берусь утверждать, но на двигателе АЛ-41Ф1С отдельных радар-блокеров в форсажной камере нет.
Для двигателей V поколения в СССР и в США были созданы трехступенчатые компрессоры низкого давления (КНД) с регулируемым и входным направляющим аппаратом (ВНА) и широкоходными лопатками, спрофилированными так, чтобы исключить помпаж и зуд без перепуска воздуха, вызывающего потери давления, увеличивающего ЭПР и усложняющего конструкцию. Чтобы удовлетворить этим требованиям и достичь заданных выходных характеристик пришлось пойти на рискованные решения. Отказ от антивибрационных полок улучшил газодинамическое качество лопаток КНД, снизил и ЭПР и массу, но чтобы обеспечить их жесткость пришлось предпринимать другие меры, пойдя на усложнение и удорожание технологии.
Особенностью американского двигателя F119-PW-100 является то, что часть потока сравнительно холодного воздуха от КНД идет мимо камеры сгорания, как это сделано в турбовентиляторных двигателях без смешения потока транспортных самолетов. Этот воздух охлаждает створки агрегата УВТ и «окутывает» горячую часть реактивной струи, но остальное направляется в основную камеру сгорания (ОКС) и далее уже в виде горячего газа после сгорания топлива в ней топлива – в форсажную камеру сгорания (ФКС).
Такой отбор воздуха, естественно, ведет к ухудшению тяговых и расходных показателей двигателя. В СССР, а затем в России технологиям «стелс» не придавалось такого значения, но и там пришлось отбирать часть воздуха на охлаждение сопла. Правда, по другой причине – для обеспечения его работы при отклонении вектора тяги на большой угол.
Компрессор низкого давления IV поколения имел 9-10 ступеней, а V поколения – только 6. Относительное удлинение его лопаток уменьшилось, что позволило повысить их газодинамическую эффективность и прочность.
Конструкторы американской фирмы «Дженерал Электрик» в своем варианте двигателя AFE (YF120-GE) пытались регулировать пропорцию расходов воздуха через контуры низкого и высокого давления путем изменения газодинамических свойств трактов в целом. Их двигатель на режиме максимальной тяги, при разгоне с числом M>1 и в сверхзвуковом крейсерском полете должен был работать как «чистый» одноконтурный ТРД, а при крейсерском полете на дозвуке и на снижении и т.д. – как ТРДД. Но это оказалось слишком сложно и дорого, что и стало одной из главных причин проигрыша в конкурсе.
Московское НПО «Сатурн» тоже делало свой ТРДДФ V поколения как двигатель изменяемого цикла, но пошло по другому пути. Регуляция потоков происходит в камере, где они смешиваются, что и позволило, хотя и не сразу, успешно решить эту очень сложную задачу.
Новинкой российского двигателя является плазменная система зажигания ОКС. Она более надежна как для обеспечения работы двигателя в момент пуска ракет, так и при его запуске в полете после аварийной остановки, что является «больным» вопросом на двигателях с широкоходным КНД.
Американским ноу-хау в области обеспечения ресурса основных камер сгорания являются «плавающие теплозащитные стенки», а также в ее конструкции применен новый сплав с увеличенным содержанием кобальта, который имеет повышенную сопротивляемость термической коррозии. В то же время опыт показывает, что ОКС не является тем элементом, который в первую очередь определяет ресурс двигателя. Другими словами, камера сгорания после наработки положенных тысяч часов будет в хорошем состоянии, но его все равно надо будет отправлять на капремонт, т.к. этого будут требовать другие узлы. Но о ремонте – чуть ниже, а пока идем дальше по двигателю и попадаем в турбину.
Число ступеней турбин высокого и низкого давления на ТРДДФ V поколения уменьшено до минимума – до одной в каждом каскаде (раньше их обычно было по две). Это самая нагруженная и теплонапряженная часть ТРДДФ, потому лопатки ТВД на двигателях IV поколения сделаны охлаждаемыми. Теперь нагрузка на каждую лопатку выросла, тем не менее, они стали неохлаждаемыми, что исключило необходимость отбора воздуха от компрессора, упростив конструкцию двигателя.
Но стоимость от этого не уменьшилась, а наоборот – резко выросла. В 70-е гг. изготовление неохлаждаемых лопаток турбин шло по пути внедрения технологий их «выращивания» как монокристаллов, но это оказалось дорого даже для одной лопатки – детали сравнительно небольшой. А теперь для снижения массы и исключения потерь давления за счет перетекания потока по стыкам лопаток и дисков рабочих колес компрессоров и турбин они делаются цельными. В США это называется Integrally Bladed Rotor – IBR. Попробуем представить, как вырастить монокристалл размером около метра! И сколько это будет стоить…
Потому пришлось вернуться к тому, от чего пытались уйти – к литью или к порошковой металлургии, поскольку штамповку, техпроцесс, оптимальный с точки зрения ресурса, нельзя применить из-за перекрытия лопаток, установленных плотно, с малым угловым шагом. Так можно сделать только заготовку для интегрального рабочего колеса. Да и допуски на размеры здесь таковы, что обойтись без последующей мехобработки отливки или порошковой детали не получается. И теперь представим: фрезерный станок с ЧПУ на минимальной подаче обрабатывает одну за другой десятки поверхностей двойной знакопеременной кривизны и каждая – под своим исходным углом, да еще перекрывающие друг друга! Может быть решение этой технологической проблемы будет найдено с развитием 3D-принтеров? Но обеспечат ли они длительное сопротивление такого рабочего колеса температурным и силовым нагрузкам, износу от механического трения и сверхбыстрого потока очень горячих газов с частичками сажи?
Валы роторов низкого и высокого давления ТРДДФ V поколения установлены на несмазываемых подшипниках и имеют противоположное направление вращения. Зазоры между нагруженными потоком и центробежной силой, нагретыми до температуры более 1500°С лопатками турбины и стенками проточной части должны быть минимальны. Так пытались сделать еще на ТРДФ III поколения J79-GE и АЛ-21Ф, но тогда столкнулись с явлением «титанового пожара». Изготовленные из этого материала лопатки под действием центробежных сил и высоких температур вытягивались, чиркали на своей огромной скорости о стенки канала и температура там подскакивала настолько, что он мгновенно возгорался. Пришлось материал лопаток и стенок каналов заменить на более тяжелую сталь, а вдоль их «дорожек» на внутренней стороне каналов проложить термостойкое спецпокрытие.

Сама форсажная камера сгорания при создании двигателей V поколения не претерпела значительных изменений, однако надо помнить, что их тяга существенно выросла, соответственно увеличились силы и температуры, действующие в ней. Единственным конструктивным новшеством стали радар-блокеры, аналогичные установленным перед ВНА. Но в ФКС они включены в конструкцию, работают в горячем потоке и должны не только не ухудшать, но и стабилизировать процесс горения истекающей с огромной скоростью топливовоздушной смеси.
Самым заметным внешним отличием российского двигателя V поколения АЛ-41Ф1 и американского F119-PW-100 является сопло со всеракурсно изменяемым вектором тяги. Конструкторы и в России, и в США вот уже много лет работают в этом направлении. Еще в СССР были проведены сравнительные испытания управляемого двумерного (плоского) и осесимметричного сопла со сферическим шарниром на летающих лабораториях на базе самолета Су-27. Они показали, что «круглый» вариант не только дает меньшие потери давления на прямом сопле и при перекладке, но при этом позволяет всеракурсное управление, тогда как плоское сопло дает возможность отклонять вектор тяги только в одной плоскости. И при этом было найдено такое решение поворотного узла, которое обеспечило существенный выигрыш в стоимости, массе, размерах и внешней аэродинамике этого агрегата по сравнению с «плоским» вариантом.

Американцы до такого при проектировании двигателей V поколения додуматься не смогли. Аналитики, рассматривающие достоинства двигателя F119-PW-100 самолета F-22A, объясняют выбор «плоского» сопла тем, что оно имеет пилообразные кромки, снижающие ЭПР. Однако уже давно очевидно, что значение этого аспекта в свое время было непомерно раздуто. Следующий истребитель V поколения F-35/JSF имеет двигатель с осесимметричным соплом – типа F135-PW. От российского АЛ-41Ф1 оно отличается «зубчатой» кромкой для снижения заметности и отсутствием управления вектором тяги.
Отклонение тяги вниз на режиме посадки есть у двигателя F135-PW-600 – оно чем-то напоминает советский ТРДДФ Р-79 разработки 1980-х гг., но потери давления в нем вероятно выше, судя по «угловатому» характеру изгиба канала из-за примитивной его конструкции. Опять же, такое управление не годится для улучшения маневренности в бою.


Усложнение управления двигателем с изменяемым вектором тяги, необходимость его объединения с процессом управления полетом в целом потребовала сделать следующий шаг в развитии соответствующих систем силовой установки. Двигатели IV поколения имели электронно-гидромеханическую систему регулирования, которая могла строится как на базе полноценного цифрового компьютера, так и достаточно простого аналогового вычислителя. Такая электроника лишь корректировала режимы, задаваемые полностью пилотом, перемещавшим рычаг управления двигателем (РУД), то теперь за ЭВМ закреплена основная роль. Особенностью V поколения ТРДДФ является электронная (цифровая) система управления с полной ответственностью. На Западе её называют FADEC – Full-Authority Digital Electronic (engine) Control.
На двигателе F119-PW-100 самолета F-22A она состоит из двух блоков управления на каждом двигателе – один рабочий и один резервный. В каждом блоке есть два канала, каждый – со своим компьютером, и таким образом каждый из двух двигателей американского истребителя теоретически имеет один работающий и три резервных канала управления. Российский АЛ-41Ф1 оснащен таким же цифровым управлением с полной ответственностью с элементами распределенных параметров.
И последнее. Все описанные компоненты выше объединяет корпус. Особенность любого реактивного двигателя заключается в том, что весь он в большей или меньшей степени нагружен силами, вызванными его тягой, и к тому же местами нагрет до очень немаленьких температур. Но грамотная конструкция, учитывающая реально действующие напряжения в его материале в каждом месте, может быть достаточно легкой. Но не дешевой.
При создании корпусов ТРДДФ давно используются методы компьютерного проектирования. Они делают прочностные и тепловые расчеты по методам конечных элементов, позволяющим оптимизировать выбор сечений и материалов деталей. Переход на крупногабаритные панели одновременно усложняет и упрощает это: увеличивается количество обсчитываемых элементов, но уменьшается число связей между деталями и реакций в них.
В результате формы частей корпуса становятся все сложнее, а требования к точности – все выше. Их уже не может обеспечить ни литье, ни штамповка, ни порошковая металлургия и приходится применять механическую обработку там, где раньше обходились «без стружки».
Ну и последнее – материалы. Например, корпусные детали F119-PW-100 вновь делают из титанового сплава, причем из специального – в США он именуется Titanium C-Alloy. Да, титан легче стали примерно вдвое при той же прочности, но он в разы дороже, труднее обрабатывается, имеет проблемы со сваркой и температурными деформациями.
Как видим, трудностей на пути создателей двигателей для истребителей V поколения было множество, и причем мы перечислили их не все. И тем не менее, они их преодолели. Как – мы узнаем во второй части статьи.
Продолжение
Статьи по теме:
Напоминаем Вам, что в нашем журнале «Наука и техника» Вы найдете много интересных оригинальных статей о развитии авиации, кораблестроения, бронетехники, средств связи, космонавтики, точных, естественных и социальных наук. На сайте Вы можете приобрести электронную версию журнала за символические 60 р/15 грн.
В нашем интернет-магазине Вы найдете также книги, постеры, магниты, календари с авиацией, кораблями, танками.
Изменение вектора тяги реактивного двигателя
ОВТ Отклонение вектора тяги дает МиГ-29М принципиально новые возможности
Одной из главных новинок предстоящего авиасалона МАКС-2005 обещает стать опытный сверхманевренный многофункциональный истребитель МиГ-290ВТ, уникальный комплекс пилотажа на котором в ходе программы показательных полетов выставки будет демонстрировать старший летчик-испытатель РСК «МиГ» Герой России Павел Власов. Самолет создан на базе предсерийного истребителя МиГ-29М №156 и является по сути летающей лабораторией для отработки двигателей РД-33 с всеракурсным отклонением вектора тяги (ОВТ) – так называемой системой КЛИВТ («Климовский вектор тяги»), разработанной санкт-петербургским «Заводом им. В.Я. Климова», – и исследования влияния ОВТ на пилотажные и тактические возможности истребителя. Эта машина, приступившая к первым полетам с ОВТ в августе 2003 г., уже демонстрировалась на предыдущем МАКСе – правда тогда только на статической стоянке. За прошедшие два года создателям и испытателям самолета и его двигателей удалось накопить необходимый опыт полетов с ОВТ, и теперь МиГ-2ЭОВТ предстанет перед зрителями во всей своей красе – в небе над Жуковским. Те, кто уже видел полеты этой машины, утверждают, что МиГ-290ВТ по своим маневренным возможностям не уступает, а в чем-то даже превосходит традиционную «звезду» показательного пилотажа – сверхманевренный Су-30МКИ. Однако дело даже не в демонстрации уникальных фигур маневрирования: по мнению главного конструктора РСК «МиГ», директора программ МиГ-29К/КУБ, МиГ-29М/М2 и МиГ-290ВТ Николая Бунтина, всеракурсное отклонение вектора тяги на новом «миге» дает ему принципиально новые возможности не только на режимах сверхманевренности, но и при традиционном пилотировании. Уже известно, что двигателями с подобной системой ОВТ будут оснащаться будущие серийные истребители МиГ-29М и МиГ-29М2, что еще более повышает интерес к новинке нынешнего МАКСа.
ОВТ: исторический аспект
Первые опыты по практической реализации идеи управления вектором тяги двигателей реактивных самолетов имеют уже почти полувековую историю, когда в 1957 г. конструкторы британской фирмы «Хоукер Сиддли» (Hawker Siddley, ныне входит в состав концерна British Aerospace) приступили к проектированию первого своего вертикально взлетающего самолета с ТРД – опытного Р. 1127 «Кестрел», прототипа будущего всемирно известного «Харриера». Оговоримся сразу: термины «управление вектором тяги» (УВТ) и «отклонение вектора тяги» (ОВТ) в целом идентичны, и употребление того или другого является, скорее, делом вкуса. Английский эквивалент – thrust vector control (TVC), чаще других используемый в англоязычной литературе, – ближе к первому. На РСК «МиГ» и «Заводе им. В.Я. Климова» предпочитают второй, что, однако, не меняет сути (хотя, возможно, подчеркивает отличие их системы от применяемых на самолетах «Сухого» двигателей с УВТ). Но вернемся к «Кестрелу».
На этом самолете для обеспечения вертикального взлета, переходных режимов, крейсерского полета, а затем вертикальной посадки единственный имевшийся на борту двигатель «Пегас» (Pegasus) снабдили двумя парами расположенных один за другим, по ту и другую стороны от центра тяжести машины, поворотными сопловыми насадками, которые, поворачиваясь, изменяли направление реактивной струи ТРДД от вертикальной вниз до горизонтальной. «Кестрел» впервые поднялся в воздух в 1960 г., а спустя шесть лет по отработанной на нем схеме был создан «Харриер», запущенный позднее в серийное производство и поступавший на вооружение ВВС и ВМС Великобритании, корпуса морской пехоты США (лицензионный вариант AV-8), палубной авиации Испании и Индии. До сих пор такие самолеты, претерпевшие немало модификаций, несут свою службу в армиях и на флотах этих и некоторых других стран, являясь сейчас, по сути, единственным в мире эксплуатируемым типом реактивного самолета вертикального взлета и посадки (СВВП).



Вертикально взлетающие самолеты «ОКБ им. А.С. Яковлева» с поворотом вектора тяги подъемно-маршевых двигателей, сверху вниз: Як-36 (1963 г.), Як-38 (1970 г.), Як-41М (1987 г.).

Первый в мире серийный СВВП «Харриер» (1966 г.), подъемно-маршевый двигатель которого оснащен четырьмя поворотными соплами

Поворотное сопло двигателя Р79В-300, применявшегося на Як-41М. Аналогичная конструкция сопла с отклоняемым вектором тяги сейчас используется на модификации перспективного истребителя F-35B с укороченным взлетом и вертикальной посадкой
Близкая к реализованной на «Кестре- ле» и «Харриере» схема обеспечения вертикального взлета и посадки нашла применение и на первом советском реактивном СВВП Як-36, поступившем на испытания в 1963 г. На нем в носовой части фюзеляжа устанавливалось два турбореактивных двигателя Р27-300, каждый из которых имел по одному поворотному соплу в районе центра тяжести самолета. Як-36 остался чисто экспериментальной машиной, однако на основе опыта его постройки и испытаний в ОКБ им. А.С. Яковлева к 1970 г. был создан и передан на испытания корабельный СВВП Як-36М, позднее поступивший в серийное производство и принятый на вооружение ВМФ Советского Союза под обозначением Як-38. Основной подъемно-маршевый двигатель Р27В-300 этого самолета имел два сопловых насадка по бокам хвостовой части фюзеляжа, поворот которых изменял вектор тяги от вертикального к горизонтальному и обратно. Вертикально взлетающие штурмовики Як-38 несли службу на тяжелых авианесущих крейсерах типа «Киев» до начала 90-х гг.
Развитием концепции первого советского серийного СВВП стал поступивший в 1987 г. на испытания сверхзвуковой истребитель Як-41М. Как и Як-38, он имел комбинированную силовую установку из двух подъемных и одного подъемно-маршевого двигателя. Однако последний – ТРДДФ Р79В-300 – имел одно осесимметричное сопло, расположенное по оси самолета между хвостовыми балками фюзеляжа и способное, благодаря оригинальной трехсегментной схеме, изменять вектор тяги в диапазоне 95° – от горизонтального до вертикального вниз и даже чуть вперед . В силу ряда причин Як-41М остался в виде всего трех опытных самолетов, и в серийное производство не передавался. Тем не менее широко известно, что отработанная на нем схема управления вектором тяги подъемно-маршевого двигателя была позднее востребована в США и вскоре найдет применение на серийной модификации перспективного истребителя вертикального взлета и укороченной посадки F-35B для Корпуса морской пехоты этой страны, а также ВМС и ВВС Великобритании.
Завершая краткий экскурс в историю управления вектором тяги на реактивных СВВП, необходимо отметить, что идея поворота сопел на них диктовалась единственной целью – обеспечить отклонение реактивной струи двигателя для создания вертикальной тяги на взлете и посадке. Правда, опыт боевого применения «Харриеров» показал, что управляя вектором тяги в полете (а не только на взлете, посадке и при выполнении зависания), можно получить определенные тактические преимущества перед самолетами противника в воздушном бою. Можно считать, что этот вывод в определенной мере и послужил в середине 80-х гг. толчком к развитию идеи управления вектором тяги на маневренных истребителях четвертого и пятого поколений, для которых вовсе не ставилась задача взлетать или садиться вертикально, но введение новых схем управления самолетом могло сулить важные преимущества в процессе ведения ближнего воздушного боя.

В полете – три летающие лаборатории NASA для отработки управления вектором тяги на самолетах-истребителях. Сверху вниз: F-18 HARV, X-31, F-16 MATV. Первые два для отклонения вектора тяги имеют специальные створки-дефлекторы позади основного сопла двигателя, последний оснащается осесимметричным соплом AVEN c всеракурсным УВТ засчет поворота створок сверхзвуковой части
К экспериментальным работам в области расширения маневренных характеристик истребителей за счет внедрения управления вектором тяги в США приступили во второй половине 80-х гг. За относительно короткий период времени здесь было разработано несколько различных схем и конструкций УВТ и построены четыре летающие лаборатории на базе истребителей F-15, F-16 и F-18. Кроме того, совместно с германскими специалистами был спроектирован и изготовлен в двух экземплярах экспериментальный сверхманевренный самолет X-31, а в рамках работ по истребителю пятого поколения (программа ATF) построены два опытных самолета YF-22. На всех этих машинах, наряду с отработкой других новых технических решений, исследовались те или иные способы управления вектором тяги и различные конфигурации и конструкции поворотных сопел двигателей.
Первым среди летающих лабораторий для исследования влияния УВТ на маневренные характеристики истребителя в США стал самолет-демонстратор F-15S/MTD (STOL/Maneuvering Technology Demonstrator – демонстратор технологий короткого взлета и посадки и маневренности), построенный на базе первого предсерийного двухместного учебно-боевого истребителя F-15B (серийный №71-0290). На нем было дополнительно установлено переднее горизонтальное оперение, а штатные двигатели F100-PW-100 оснастили экспериментальными плоскими соплами с отклонением вектора тяги в вертикальной плоскости и возможностью реверсирования тяги. Первый полет F-15S/MTD состоялся 7 сентября 1988 г., а 10 мая 1989 г. на нем было осуществлено первое изменение вектора тяги в полете. 2 марта 1990 г. на F-15S/MTD впервые опробовали использование реверса тяги при боевом маневрировании. Испытания F-15S/MTD завершились в 1991 г., результаты влияния УВТ двигателей с плоским соплами на маневренные характеристики истребителя в вертикальной плоскости были признаны положительными.
К этому времени подобная идея управления вектором тяги двигателей с плоскими соплами для повышения маневренности самолета по тангажу нашла отражение и в конструкции двух опытных экземпляров перспективного истребителя пятого поколения YF-22 фирмы «Локхид Мартин» (Lockheed Martin), поступивших на испытания в 1990 г. Первый из них оснащался опытными двигателями General Electric YF120, а второй – Pratt amp; Whittney YF119, оба – с плоскими соплами с отклонением вектора тяги в вертикальной плоскости на угол до 20° вверх и вниз. Первое ОВТ на YF-22 №1 с двигателями YF120 было выполнено 15 ноября 1990 г. Основной цикл испытаний двух самолетов YF-22 (и представленных на конкурс с ними двух YF-23 фирмы «Нор- троп Грумман» (Northrop Grumman) с такими же двигателями) был завершен к концу 1990 г. Для будущего серийного производства ВВС США выбрали самолет фирмы «Локхид» и двигатель «Пратт-Уитни». Первый предсерийный F-22A с двигателями F119-PW-100 поступил на испытания в 1997 г. На нем и на всех последующих самолетах этого типа (а к настоящему времени их построено уже более трех десятков) используются плоские сопла с УВТ в вертикальной плоскости, что значительно повышает маневренные возможности истребителя на малых скоростях и больших углах атаки.
Следующей американской летающей лабораторией для исследования поведения истребителя на больших углах атаки, на которой отрабатывалось УВТ, стал самолет F-18 HARV (High Alpha Research Vehicle – аппарат для исследования больших углов атаки), построенный в 1987 г. на базе шестого предсерийного истребителя F-18 с двигателями F404-GE-400. Вначале он был укомплектован только экспериментальной системой дистанционного управления и до 1989 г. выполнил 101 полет по первому этапу испытаний, в ходе которых достигал углов атаки до 55°. Затем машину дооборудовали тремя специальными створками (дефлекторными панелями) из содержащего хром и сталь высокотемпературного никелевого сплава, расположенными за соплами двигателей, которые позволяли производить отклонение вектора тяги как в вертикальной, так и в горизонтальной плоскости. Испытания F-18 HARV, оснащенного системой ОВТ, которые начались 12 июля 1991 г., продемонстрировали существенное повышение маневренности на средних углах атаки и возможность управления и устойчивого полета истребителя на больших углах вплоть до 70°, в т.ч. эффективного управления по крену на углах атаки до 65° (ранее оно было возможно только на углах до 35°). В дальнейшем самолет дополнительно оснастили специальными подвижными управляющими поверхностями в носовой части фюзеляжа для управления в боковом канале. С ними в июле 1995 – сентябре 1996 гг. он прошел заключительный третий этап испытаний, на которых оценивалось влияние УВТ и дополнительных поверхностей на управляемость самолета по тангажу, крену и рысканью на больших углах атаки. Всего на F-18 HARV выполнили 385 полетов, последний из них состоялся 6 сентября 1996 г.

Летающая лаборатория F-15 ACTIVE. В 1988-1991 гг. самолет летал по программе F-15 S/MTD и имел плоские сопла с УВТ по тангажу и реверсом тяги. В 1995 г. получил двигатели F100-PW-229 с осесимметричными соплами P/YBBN с всеракурсным УВТ

новейший серийный истребитель ВВС США F/A-22A «Рэптор» оснащается двумя двигателями F119-PW-100, плоские сопла которых могут отклонять вектор тяги в вертикальной плоскости

Прототип перспективного «единого» истребителя F-35A, опытный самолет Х-35А, так же, как и будущие серийные машины, оснащен одним двигателем F135 с осесимметричным соплом, имеющим систему всеракурсного УВТ
Подобная система УВТ с тремя отклоняемыми створками позади сопла двигателя F404-GE-400 (на этот раз только из графитоэпоксидных композиционных материалов) нашла применение и на экспериментальном сверхманевренном самолете Х-31. Он был разработан совместными усилиями специалистов американской фирмы «Рокуэлл» (Rockwell International) и германской «Дойче Аэроспейс» (Deutsche Aerospace) в интересах создания перспективных истребителей следующего поколения для исследования возможностей пилотирования на сверхбольших углах атаки при ведении ближнего воздушного боя. Первый экземпляр Х-31 впервые поднялся в воздух 11 октября 1990 г., второй – 19 января 1991 г. Постепенно расширяя диапазон полетных углов атаки, 6 ноября 1992 г. на втором Х-31 был впервые выполнен управляемый полет с углом атаки 70° и осуществлено первое управляемое вращение по крену на этом угле. 29 апреля 1993 г. на нем впервые выполнили уникальный закритический маневр – разворот с минимальным радиусом (всего 130 м!), получивший название «маневр Хербста» (Herbst Maneuver). На завершающей стадии испытаний Х-31 привлекался к учебным воздушным боям с истребителями F/A-18 и некоторыми другими американскими тактическими самолетами, что позволило оценить влияние сверхманевренности на исход воздушных поединков. Результаты превзошли все ожидания. В значительной степени они определялись наличием на Х-31 всеракурсного У ВТ, позволявшего эффективно управлять самолетом по тангажу, крену и курсу на углах атаки до 70°. Всего на двух самолетах Х-31 (второй из них был потерян в аварии 19 января 1995 г.) выполнили 580 полетов, в т.ч. 21 в Европе – в рамках подготовки и участия в авиасалоне в Ле-Бурже в 1995 г. Пилотирование сверхманевренного Х-31 освоили 14 американских и немецких летчиков. Программа испытаний самолета завершилась 13 мая 1995 г.
Следующее направление исследований управления вектором тяги было связано в США с применением поворотных осесимметричных сопел. Были разработаны две принципиальные схемы таких сопел: с отклонением всего выходного устройства (проекты MPJM/BBN для двигателя F100-PW-100 фирмы «Пратт- Уитни» и GEATRV фирмы «Дженерал Электрик») и с поворотом только сверхзвуковой (расширяющейся) части сопла (программы P/YBBN фирмы «Пратт- Уитни» и AVEN фирмы «Дженерал Электрик»), До летных экспериментов с первыми двумя дело не дошло, а всеракурс- ные управляемые сопла P/YBBN и AVEN прошли отработку на летающих лабораториях, созданных на базе истребителей F-15 и F-16.
Сопло AVEN (Axisymmetric Vectoring Exhaust Nozzle – осесимметричное реактивное сопло с УВТ) было в 1993 г. установлено на двигатель F110-GE-100 экспериментального самолета NF-16D. Последний построили в 1988 г. на базе серийного истребителя F-16D Block 30 №86-0048 по программе VISTA (Variable stability In-flight Simulator Test Aircraft – опытный самолет для летной оценки изменяемой устойчивости). Программа испытаний УВТ на нем получила название MATV (Multi Axis Thrust Vectoring – всеракурсное УВТ), а сам самолет – F-16 MATV. Поворот створок сверхзвуковой части сопла AVEN обеспечивал отклонение вектора тяги двигателя на угол до 17° в любом направлении. Первое ОВТ на самолете F-16 MATV в полете было выполнено 30 июля 1993 г.
К моменту завершения программы MATV в марте 1994 г. на нем было выполнено 95 полетов. F-16 MATV использовался для оценки влияния всеракурсного УВТ на маневренные и тактические возможности истребителя в ближнем воздушном бою «один на один» и «один против двух». Кроме того, он демонстрировал возможность внедрения двигателей с УВТ на строевые самолеты ВВС США.
Всеракурсными управляемыми соплами P/YBBN (Pitch/Yaw Balance Beam Nozzles – «балансирные» сопла с отклонением по тангажу и курсу) фирмы «Пратт-Уитни» в 1995 г. оснастили два двигателя F100-PW-229, установленные на опытный самолет F-15B №71-0290, использовавшийся ранее по программе F-15S/MTD (см. выше). Новая летающая лаборатория получила название F-15 ACTIVE (Advanced Control Technology for Integrated Vehicles – перспективные технологии управления авиационными комплексами). Отклонение створок сверхзвуковой части сопел P/YBBN обеспечивало поворот вектора тяги двигателей на угол до 20° в любом направлении со скоростью перекладки до 120°/с. Конструкция самолета была усилена для восприятия появившейся боковой составляющей тяги величиной примерно до 1800 кгс (расчетная вертикальная составляющая тяги – до 2800 кгс). Первый полет на F-15 ACTIVE с УВТ состоялся 27 марта 1996 г., а уже 24 апреля того же года было осуществлено первое отклонение вектора тяги для управления в боковом канале на сверхзвуковой скорости (М=1,6). В ходе испытаний диапазон полетных условий, при которых осуществлялось отклонение вектора тяги для управления по тангажу и по курсу, был расширен до скоростей, вдвое превосходящих скорость звука. В 1998 г. была проведена дальнейшая доработка самолета, в результате внесли изменения в систему управления вектором тяги (программа 1LTV – Inner Loop Thrust Vectoring). В 1997 г. планировалось также испытать двигатель F100-PW-229 с соплом P/YBBN на экспериментальном самолете F-16 MATV, однако из-за отказа в финансировании эта программа реализована не была.
Опыт, полученный в США при испытаниях летающих лабораторий с экспериментальными системами УВТ, нашел применение на перспективных истребителях пятого поколения. Как уже отмечалось, плоские сопла с УВТ в вертикальной плоскости применяются на серийных истребителях F/A-22 «Рэптор», первые из которых должны поступить в строевую эксплуатацию в ВВС США к концу этого года. Однако при имеющейся простоте механизма ОВТ и преимуществах в обеспечении малой заметности такие сопла имеют ряд существенных недостатков. Основные из них связаны с потерями тяги при трансформации потока газов из осесимметричного за турбиной в плоский в сопле, а также со значительно большей массой конструкции плоского сопла, по сравнению с традиционным круглым. К тому же в плоском сопле гораздо сложнее реализовать УВТ в горизонтальной плоскости (сопло при этом получается еще более громоздким и тяжелым).
В связи с этим на другом американском перспективном истребителе F-35 (JSF) сопло будет не плоским, а осесимметричным. Как уже отмечалось в предыдущем разделе, на модификации F-35B для Корпуса морской пехоты США, ВМС и ВВС Великобритании, отличающейся от других вариантов самолета возможностью укороченного взлета и вертикальной посадки, будет применяться осесимметричное трехсег- ментное сопло с отклонением тяги вниз на угол около 90°, аналогичное по схеме использовавшемуся на российском СВВП Як-41М. А на вариантах F-35A для ВВС США и других стран, а также F-35C для ВМС США двигатель F135 (развитие F119-PW-100) будет комплектоваться осесимметричным соплом с всеракурсным УВТ. Подробности о его конструкции пока неизвестны, но, скорее всего, его схема подобна той, что была отработана на летающей лаборатории F-15 ACTIVE, оснащенной двигателями F100-PW-229 с соплами P/YBBN, т.е. предусматривает отклонение тяги во всех направлениях путем поворота створок сверхзвуковой части сопла. Поступление первых самолетов F-35 на вооружение запланировано на 2010-2012 гг. С учетом интернационального характера программы F-35 и того, что он в перспективе обещает стать единым истребителем стран НАТО и некоторых других государств (каким сейчас является F-16), можно предположить, что спустя 15-20 лет управление вектором тяги станет массовым явлением в истребительной авиации многих стран мира.

Демонстрация отклонения вектора тяги соплом TVN, разработанным в 1998 г. испанской фирмой ITP для двигателя EJ200 истребителя EF2000 «Тайфун»
Эксперименты с управлением вектором тяги двигателей для современных истребителей проводятся за рубежом не только в США. К подобным работам в 1995 г. приступили и в Европе, где испанская фирма ITP при поддержке германской MTU начала проектирование всеракурсного поворотного сопла TVN для выпускаемого консорциумом «Евроджет» (Eurojet), в который входят эти компании, двухконтурного турбореактивного двигателя с форсажной камерой EJ200 – основы силовой установки современного западноевропейского истребителя Eurofighter EF2000 «Тайфун» (Typhoon). Как и в американских проектах P/YBBN и AVEN, в испанском сопле реализовано всеракурсное отклонение вектора тяги (на угол до 20° в любую сторону) посредством управления створками его сверхзвуковой части.
Стендовые испытания опытного двигателя EJ200-01A с экспериментальным соплом TVN начались в июле 1998 г. К февралю 2000 г. он наработал на стенде 80 ч, в т.ч. 15 ч – на форсаже, претерпев 6700 перекладок створок сопла со скоростью от 23,5 до 110°/с. На испытаниях была зафиксирована максимальная боковая составляющая тяги около 2000 кгс (что составляет почти одну треть от общей тяги EJ200 на максимальном режиме и более 20% от его тяги на полном форсаже). Летом 2000 г.
были проведены испытания EJ200-01A с соплом TVN на высотном стенде в Штутгарте (Германия), а в ноябре того же года компания ITP объявила о предварительной договоренности с Германией и США провести летные испытания нового двигателя с УВТ на экспериментальном самолете X-31 (см. выше). Первый его полет с EJ200-01A и соплом TVN мог состояться в конце 2002 – начале 2003 г. Кроме того, консорциумы «Еврофайтер» и «Евроджет» выразили совместное желание оснастить таким соплом один из двигателей первого опытного экземпляра «Тайфуна» – самолета DA1 – с возможным выходом его на испытания «после 2003 г.», а в дальнейшем, примерно с 2010 г., комплектовать двигателями с УВТ серийные EJ2000 так называемого третьего этапа поставки (Tranche-3). Полноразмерный макет EJ200 с действующим образцом сопла TVN с успехом демонстрировался на выставке в Фарнборо, однако с 2001 г. информация о дальнейших успехах и планах в отношении модификации EJ200 с УВТ поступать перестала. Возможно, программа была приостановлена.
«Сухой»: от экспериментов к серии
В Советском Союзе практические работы по управлению вектором тяги двигателей для перспективных истребителей и расширения маневренных возможностей самолетов четвертого поколения начались во второй половине 80-х гг., т.е. практически одновременно с США. В рамках создания в НПО «Сатурн» им. А.М. Люльки ТРДДФ пятого поколения АЛ-41Ф в классе тяги 18-20 тс для Многофункционального истребителя ОКБ им. А.И. Микояна (МФИ, проект «1.42») было разработано плоское сопло, предусматривавшее возможность отклонения вектора тяги. Аналогичные двигатели рассматривались и для проекта перспективного истребителя «ОКБ Сухого» с крылом обратной стреловидности С-32 (позднее получил обозначение С-37, а ныне известен как Су-47 «Беркут»). Однако в дальнейшем от идеи применения плоского сопла в конструкции АЛ-41Ф отказались, перейдя к традиционному осесимметричному выходному устройству. Недостатки плоского сопла, послужившие причиной отказа от него и в конструкции российского ТРДДФ пятого поколения, уже излагались выше. Главные из них – потери тяги и значительное утяжеление конструкции двигателя и самолета в целом.

опытное плоское сопло с УВТ в вертикальной плоскости и реверсом тяги на двигателе АЛ-31Ф летающей лаборатории Су-27УБ №02-02 – ЛЛ-УВ(ПС), 1990 г.

макет плоского сопла с УВТ на проектировавшемся АМНТК «Союз» ТРДДФ Р179-300, 2002 г.

серийный двигатель АЛ-31ФП с поворотным соплом. Им оснащаются серийные истребители Су-30МКИ, находящиеся на вооружении ВВС Индии
Стоит правда заметить, что относительно недавно, на выставке «Двигатели-2002», АМНТК «Союз» представил полноразмерный макет своего нового двигателя Р179-300, проектируемого на базе подъемно-маршевого ТРДДФ четвертого поколения Р79В-300 с поворотным соплом, который использовался на СВВП Як-41М (см. выше). Нынешний двигатель демонстрировался в комплекте с плоским соплом, что предполагает возможность использования в нем УВТ. И хотя двигатели серии Р179-300 некоторое время рассматривались в качестве силовых установок перспективных боевых самолетов (в частности, одного из вариантов упомянутого выше С-37, опытный образец которого испытывается с 1997 г. с двумя ТРДДФ Д-30Ф-11), дальше проекта, макета и испытаний отдельных узлов нового двигателя у «Союза» дело, видимо, пока не пошло.
В возможностях плоского сопла в Советском Союзе успели убедиться и экспериментально. В конце 80-х гг. НПО «Сатурн» им. А.М. Люльки в содружестве с уфимским НПО «Мотор» (главный конструктор А.А. Рыжов), ЦИАМ, ЛИИ, «ОКБ Сухого» и КнААПО был проведен цикл исследований по плоскому соплу с управлением вектором тяги в вертикальной плоскости, а также реверсированием тяги для эффективного торможения самолета при посадке и боевом маневрировании. Применение такого сопла также должно было способствовать значительному снижению уровня инфракрасной заметности летательного аппарата – параметра, которому придавалось большое значение при разработке перспективных боевых самолетов пятого поколения.
Экспериментальное плоское сопло было изготовлено в НПО «Мотор» и установлено на левый двигатель АЛ-31Ф летающей лаборатории ЛЛ-УВ(ПС), созданной в 1990 г. на базе самолета Су-27УБ №02-02 производства КнААПО. С аэродрома ЛИИ на ЛЛ-УВ(ПС) было выполнено 20 полетов, в ходе которых были получены данные по значительному (в несколько раз) снижению уровня ИК-заметности двигателя с плоским соплом. К сожалению, недостаточное финансирование не позволило провести на этом самолете полный цикл летных испытаний по отработке УВТ и реверса.
Но к этому времени в СССР уже были получены первые практические результаты по управлению вектором тяги посредством отклонения в вертикальной плоскости обычного осесимметричного сопла двигателя АЛ-31Ф, применяемого на всех истребителях семейства Су-27. С учетом проблем, с которыми пришлось столкнуться при разработке плоского сопла, именно такое направление было признано более целесообразным. Еще в 1986 г. коллектив НПО «Сатурн» им. А.М. Люльки, возглавляемый генеральным конструктором В.М. Чепкиным, начал проектирование первого варианта одношарнирного осесимметричного поворотного сопла для двигателя АЛ-31Ф, обеспечивающего отклонение вектора тяги в вертикальной плоскости в диапазоне углов ±15°. Такое сопло было установлено на двигатель АЛ-31Ф. Поворотным выполнялось все сопло двигателя (как на американских проектах F100MPJM/BBN и GEATRV).
Серийный двигатель АЛ-31Ф с первым экспериментальным вариантом поворотного сопла с питанием приводной части системы его управления от гидравлической системы самолета был установлен в 1989 г. на самолет Т10-26 (Су-27 №07-02). В первый полет его поднял 21 марта 1989 г. летчик-испытатель Олег Цой. В испытаниях этой летающей лаборатории, называвшейся ЛЛ-УВ(КС), принимал участие также Виктор Пугачев. По результатам исследований АЛ-31Ф с экспериментальным поворотным соплом на Т10-26 было принято решение разработать серийный вариант двигателя с управляемым вектором тяги со следящими приводами, включенными в контур системы дистанционного управления самолетом.

Опытный истребитель Т10М-11 (Су-37) с опытными двигателями АЛ-31Ф с УВТ, 1996 г.

Второй прототип Су-30МКИ с двигателями АЛ-31ФП, 1998 г. По сравнению с Су-37, изменение положения оси поворота сопел позволяет получить не только вертикальную, но и боковую составляющую тяги.
Два подобных двигателя было рекомендовано использовать на опытной модификации самолета Су-27М, на которой предстояло отработать влияние УВТ на маневренные характеристики истребителя, в т.ч. на закритических (вплоть до 90°) углах атаки и скоростях полета, близких к нулевым.
Такой модификацией стал опытный самолет Т10М-11 (№711), известный в 1996-2000 гг. под названием Су-37. В 1995 г. его оснастили опытными двигателями АЛ-31Ф с поворотными в вертикальной плоскости соплами, боковой ручкой управления и тензометрически- ми РУД, а также модифицированной системой дистанционного управления СДУ-10МБР разработки МНПК «Авионика», обеспечивающей управление самолетом от боковой ручки, в т.ч. и за счет управления вектором тяги двигателей. В отличие от экспериментального варианта двигателя с поворотным соплом, испытывавшегося в 1989 г. на Т10-26, система управления вектором тяги на Су-37 была включена в контур СДУ самолета, что позволяло обеспечить управляемость самолета на сверхбольших углах атаки и скоростях полета, близких к нулевым.
Первый вылет на самолете Т10М-11 с УВТ и новой системой управления выполнил 2 апреля 1996 г. летчик-испытатель «ОКБ Сухого» Евгений Фролов, осуществивший затем весь цикл испытаний этой машины. В ходе первых же полетов Фролов приступил к отработке на Су-37 новых фигур пилотажа: переворотам в вертикальной плоскости без изменения траектории поступательного полета («чакра Фролова»), форсированным разворотам с минимальными радиусами, «управляемому штопору» и др. Помимо чисто демонстрационного эффекта, реализация режимов сверхманевренности, по мнению специалистов, обеспечивала истребителю Су-37 безусловное превосходство в ближнем бою над противником, не обладающим такими возможностями.
Конструктивно управление вектором тяги каждого двигателя самолета Су-37 было реализовано в виде поворотного осесимметричного сопла, закрепленного на кольцевом поворотном устройстве и отклоняемого в вертикальной плоскости двумя парами гидроцилиндров в диапазоне углов ±15°. В качестве рабочего тела системы поворота сопел на Су-37 применялась гидросмесь от бортовой гидравлической системы самолета.
Самолет Су-37, пилотируемый летчиком-испытателем Евгением Фроловым, в сентябре 1996 г. был впервые продемонстрирован мировой публике на выставке в Фарнборо (Великобритания). В последующие несколько лет Су-37 неоднократно принимал участие в различных авиасалонах и аэрошоу как в России, так и за рубежом. И везде показательные выступления Героя России Е.И. Фролова на Су-37 вызывали восхищение зрителей, отдававших должное уникальным возможностям самолета и мастерству летчика. Программа испытаний самолета Т10М-11 с двигателями АЛ-31Ф с УВТ завершилась в 2000 г.
Развитием двигателя АЛ-31Ф с поворотным осесимметричным соплом, отработанного на Су-37, стал серийный ТРДДФ АЛ-31ФП для сверхманевренного многофункционального истребителя Су-30МКИ, разработанного по заказу ВВС Индии (подробнее об этой программе – см. «Взлёт» №3/2005, стр. 20-27). По контракту от 30 ноября 1996 г. Иркутскому авиационному заводу предстояло поставить в эту страну 40 таких самолетов (забегая вперед следует сказать, что после уточнения контракта и заключения дополнительных соглашений всего в Индию отправили 32 самолета Су-30МКИ с двигателями АЛ-31ФП с УВТ и 18 самолетов Су-30К с обычными ТРДДФ АЛ-31Ф). Первый опытный самолет Су-30МКИ с двумя двигателями АЛ-31ФП с УВТ совершил первый полет 1 июля 1997 г., его испытания проводил летчик-испытатель «ОКБ Сухого» Вячеслав Аверьянов.
Как и опытные АЛ-31Ф с УВТ, применявшиеся на самолете Т10М-11, двигатель АЛ-31ФП оснащается поворотным в пределах ±15° соплом. Однако в отличие от опытных двигателей, у АЛ-31ФП ось поворота сопла отклонена от продольной плоскости симметрии на 32°, что позволяет при дифференциальном отклонении сопел двух двигателей получить не только вертикальную, но и боковую составляющую тяги. В сочетании с возможностью автоматического дифференциального изменения тяги двух двигателей (так называемое управление «разнотягом») это обеспечивает управление самолетом во всех плоскостях на сверхмалых и околонулевых скоростях полета, когда обычные аэродинамические органы управления теряют свою эффективность. Система управления вектором тяги на Су-30МКИ включена в систему дистанционного управления самолетом и не имеет каких бы то ни было отдельных рычагов управления. Для повышения надежности система управления вектором тяги АЛ-31ФП выполнена автономной, работающей на керосине, отбираемом от системы топливопитания двигателя, и не зависит от гидросистемы самолета. Серийный выпуск двигателей АЛ-31ФП освоен Уфимским моторостроительным производственным объединением (ОАО «УМПО», г. Уфа).

в полете – летающая лаборатория Т10М-10 (Су-27М №710), на которой с 2004 г. отрабатываются глубоко модернизированные двигатели, создаваемые по программе истребителя пятого поколения, 2005 г. По всей видимости, они будут оснащаться системой всеракурсного УВТ.

макетный образец всеракурсного поворотного сопла на модернизированном двигателе АЛ-31Ф-М1 разработки ММПП «Салют» на летающей лаборатории Су-27 №595, 2003 г.

опытный двухместный корабельный учебно-боевой и многоцелевой самолет Су-27КУБ недавно также получил двигатели с УВТ – на серийные АЛ-31Ф сер.3 были установлены сопла от АЛ-31ФП, 2005 г.
Управление вектором тяги, прогрессивная аэродинамическая компоновка и эффективная система управления обеспечили Су-30МКИ поистине уникальные маневренные возможности. Летчик-испытатель Вячеслав Аверьянов освоил на этом самолете такой комплекс пилотажа, который в то время не был доступен ни одному другому боевому самолету в мире, и с 1998 г. с блеском демонстрирует его на различных авиационных выставках в России и за рубежом.
Для летных испытаний по программе Су-30МКИ в период с 1997 по 2001 гг. было выпущено в общей сложности два опытных и четыре предсерийных самолета с двигателями АЛ-31ФП, а с 2002 г. начались поставки серийных Су-30МКИ в Индию. Они успешно завершились в декабре 2004 г., когда в Индии началось лицензионное производство таких истребителей (всего по контракту от 28 декабря 2000 г. здесь планируется изготовить в период до 2017 г. 140 Су-30МКИ). Поступив к настоящему времени на вооружение уже двух эскадрилий ВВС Индии, Су-30МКИ стал, таким образом, первым в мире строевым боевым самолетом с УВТ. А вскоре подобные машины появятся еще в одной стране: по контракту от 5 августа 2003 г. НПК «Иркут» поставит начиная с 2006 г. в Малайзию 18 самолетов Су-30МКМ с двигателями АЛ-31ФП с УВТ.
Стоит заметить, что самолеты семейства Су-27/Су-30, оснащенные двигателями с УВТ, разрабатываются не только для зарубежных заказчиков. Так, летом 2003 г. комплектом двигателей АЛ-31Ф серии 3 с поворотными соплами (аналогичными применяемым на АЛ-31ФП) был оснащен опытный корабельный учебно-боевой и многофункциональный самолет Су-27КУБ. Применение УВТ повысило маневренные и взлетно- посадочные характеристики этого самолета корабельного базирования, что было подтверждено испытаниями Су-27КУБ на ТАВКР «Адмирал Кузнецов» в Баренцевом море в ноябре 2004 г. (см. «Взлёт» №7/2005, стр. 32-33).
Технически нет принципиальных проблем устанавливать подобные двигатели с УВТ и на другие самолеты семейства Су-27 для Вооруженных Сил России. В частности, применение УВТ рассматривается для модернизированных истребителей Су-27СМ2 (для ВВС России) и Су-35 (на экспорт). Как известно, такие машины должны последовать за нынешними Су-27СМ и Су-30МК и стать промежуточным шагом к будущему истребителю пятого поколения – Перспективному авиационному комплексу фронтовой авиации (ПАК ФА), разрабатываемому сейчас в «ОКБ Сухого». Согласно сообщениям в печати, на последнем найдут применение двигатели АЛ-41Ф1 разработки НПО «Сатурн», являющиеся глубокой модернизацией нынешних АЛ-31Ф с использованием технологий, опробованных при создании ТРДДФ пятого поколения АЛ-41Ф. Судя по всему, на них также будет реализовано управление вектором тяги посредством отклонения осесимметричного сопла. Опытные образцы таких двигателей (видимо, пока еще без системы УВТ) с марта 2004 г. проходят испытания на летающей лаборатории Т10М-10 (Су-27М №710). Считается, что двигатели типа АЛ-41Ф1 смогут найти применение и на упомянутых выше Су-27СМ2 и Су-35. Серийный выпуск таких силовых установок будет налажен на УМПО.

сопло «КЛИВТ» с поворотом створок сверхзвуковой для двигателя РД-33, впервые показанное на выставке «Двигатели-98», 1998 г.


двумя двигателями РД-33 с соплами «КЛИВТ» с всеракурсным ОВТ был оснащен опытный истребитель МиГ-29М №156, получивший название МиГ-290ВТ. Первый показ самолета на МАКС-2001

двигатель РД-33 с ОВТ для перспективных модификаций истребителя МиГ-29, выставка «Двигатели-2004»
Альтернативный вариант «ремотори- зации» строевых самолетов типа Су-27 разработан также на другом моторостроительном предприятии, выпускающем серийные двигатели АЛ-31Ф – ММПП «Салют». Модернизированные на этом заводе двигатели АЛ-31Ф-М1 (а затем АЛ-31Ф-М2 и АЛ-Э1Ф-МЗ) могут оснащаться соплами с всеракурсным отклонением вектора тяги за счет одновременного поворота створок сверхзвуковой части сопла. Подобная конструкция системы УВТ спроектирована на «Салюте» с участием специалистов «Завода им. В.Я Климова», разработавших систему ОВТ «КЛИВТ» (подробнее об этом – в следующем разделе). Согласно материалам ММПП «Салют», к моменту проведения выставки «Двигатели-2004» в апреле 2004 г. наработка реактивного сопла с УВТ в составе двигателя типа АЛ-31Ф на стендах составила уже 400 ч. Величина угла отклонения вектора тяги достигала 16° в каждую сторону, а скорость перекладки сопла – 60°/с. За полгода до этого «салютовский» АЛ-31Ф-М1 с УВТ демонстрировался на статической стоянке МАКС-2003 в составе силовой установки летающей лаборатории ЛИИ Су-27П №37-11 (бортовой №595). На этом самолете двигатель АЛ-31Ф-М1, имеющий повышенную, по сравнению с серийным АЛ-31Ф, тягу, к тому моменту уже прошел серию летных испытаний. На очереди была летная отработка на нем сопла с УВТ, однако, судя по всему, из-за недостатка финансирования приступить к ней пока не удалось.
В середине 90-х гг. к разработке собственного варианта системы отклонения вектора тяги двигателей для истребителей класса МиГ-29 приступили на санкт-петербургском «Заводе им. В.Я. Климова» – предприятии, где были разработаны применяемые на этом самолете ТРДДФ четвертого поколения РД-33, а в дальнейшем создавались их новые модификации. Кстати, в этом году исполняется 25 лет, как РД-33 был запущен в серийное производство на московском заводе «Красный Октябрь» (ныне ММП им. В.В. Чернышева), где оно осуществляется и поныне. За прошедшее время двигатель претерпел ряд изменений, направленных на повышение его надежности и увеличение ресурса, в результате чего он и сегодня не уступает, а по ряду параметров превосходит свои зарубежные аналоги. Двигателями РД-33 укомплектован весь парк истребителей МиГ-29, эксплуатируемых сейчас в России, семи странах СНГ и более чем двух десятках стран дальнего зарубежья.
Помимо увеличения тяги, улучшения экономичности и дальнейшего повышения эксплуатационных показателей, одним из основных направлений дальнейшего развития двигателей семейства РД-33 на «Климове» определили создание модификации с отклоняемым вектором тяги. Проанализировав имевшийся к тому времени зарубежный и отечественный опыт, на заводе пришли к мнению, что наиболее целесообразно реализовать идею поворота не всего осесимметричного сопла, а только его сверхзвуковой части. По сравнению с поворотом всего выхлопного устройства (как, например, на двигателе АЛ-31ФП), это позволяло уменьшить массу конструкции, сделать ее достаточно простой и технологичной, повысить быстродействие механизма перекладки сопла, а главное – обеспечить возможность всеракурсного отклонения вектора тяги в любом направлении.
К началу 1997 г. на «Климове» был спроектирован и изготовлен первый опытный образец сопла с поворотной сверхзвуковой частью. В ходе стендовых испытаний в составе двигателя в течение 50 ч выполнили около 1000 перекладок сопла на всех режимах работы, включая полный форсаж. Максимальные углы отклонения вектора тяги составляли + 15° во всех направлениях, а скорость перекладки достигала 30°/с (в дальнейшем ее довели до 60°/с).
Конструктивная схема сопла предусматривает одновременный поворот всех сверхзвуковых створок на заданный угол за счет воздействия на них через тяги одного общего управляющего кольца, приводимого в движение тремя гидроприводами, которые в свою очередь прикреплены к неподвижному силовому поясу на форсажной камере. Положение концов штоков гидроприводов в трех точках однозначно определяет положение управляющего кольца в пространстве и, соответственно, направление вектора тяги. Вследствие появления дополнительных продольных и поперечных сил, воздействующих на сопло и корпусную систему двигателя при отклонении вектора тяги, некоторые элементы конструкции форсажной камеры пришлось усилить.
Одновременно с введением сопла с ОВТ в конструкцию двигателя планировалось внести ряд других изменений, направленных, в частности, на повышение тяговых характеристик: на полном форсаже тяга должна была возрасти с 8300 до 9000 кгс, а на максимальном режиме – с 5040 до 5600 кгс. На нем должна была найти применение новая цифровая система регулирования. Такой двигатель получил обозначение РД-133, и под таким названием демонстрировался весной 1998 г. на выставке «Двигате- ли-98», а летом следующего года – на МАКС-99. Однако в дальнейшем под маркой РД-133 «Завод им. В.Я. Климова» представлял уже обычный серийный двигатель РД-33, но оснащенный рассмотренной выше системой ОВТ. Сейчас от этого названия отказались, и модификация с отклоняемым вектором тяги именуется просто «РД-33 с ОВТ».
В конце 90-х гг. аналогичным соплом с ОВТ «Завод им. В.Я. Климова» планировал комплектовать и создававшиеся на базе РД-33 более мощные и современные модификации тягой до 10-12 тс. На различных выставках они фигурировали под названиями РД-333, РД-33-10М, ВКС-10М и т.п. По всей видимости, это намерение разработчика сохраняется, меняются только марки новых модификаций популярного ТРДДФ.
Планировалось, что уже в конце 1997 г. на летающей лаборатории МиГ-29 смогут начаться летные испытания двигателя РД-33 с ОВТ. К сожалению, в то время средств у заказчика на это не нашлось. Тем не менее, в 2001 г. два двигателя с ОВТ были все же установлены на опытный самолет МиГ-29М №156, участвовавший до 1993 г. в летных испытаниях по программе МиГ-29М (типа «9-15»). Под маркой МиГ-29ОВТ он демонстрировался в статической экспозиции МАКС-2001. А еще спустя два года самолет смогли подготовить к летным испытаниям, и в августе 2003 г. летчик-испытатель РСК «МиГ» Павел Власов выполнил на нем первый полет с отклонением вектора тяги. К моменту проведения авиасалона МАКС-2003 налет истребителя с экспериментальной системой ОВТ был еще недостаточным, и перекрашенный по яркой красно-белой схеме МиГ-29М №156 (МиГ-29ОВТ) не рискнули допускать к программе демонстрационных полетов, ограничившись показом на статической стоянке. На этой выставке стало известно, что подобными двигателями с ОВТ предполагается комплектовать будущие серийные истребители МиГ-29М и МиГ-29М2, и на сопроводительном планшете, установленном рядом с самолетом №156, было указано, что в состав силовой установки МиГ-29М/М2 войдут два двигателя РД-33МК с ОВТ с тягой на полном форсаже 9000 кгс.
К началу августа 2005 г. на летающей лаборатории МиГ-29ОВТ №156 летчиками РСК «МиГ» Павлом Власовым и Михаилом Беляевым выполнено уже более 50 полетов с отклонением вектора тяги, отработана как сама система ОВТ и управления ей, так и ее связь с системой дистанционного управления самолетом (об испытаниях МиГ-29ОВТ см. также «Взлёт» №4/2005, стр. 34). Полученные результаты полностью удовлетворяют разработчиков и, по мнению главного конструктора РСК «МиГ» Николая Бунтина, программа испытаний близка к завершению. Двигатель с ОВТ можно запускать в серийное производство для будущих серийных МиГ-29М и МиГ-29М2. Пока же изготовлено пять РД-33 с ОВТ (два из них проходили стендовые испытания, два установлены на МиГ-29ОВТ №156 и один поставлен для летных испытаний в качестве запасного).
Исследуя проблему ОВТ, на «Заводе им. В.Я. Климова» пришли к выводу, что разработанную конструкцию сопла с всеракурсным отклонением его сверхзвуковой части можно не только применять на ТРДДФ типа РД-33, но и адаптировать к двигателями других типов, в т.ч. зарубежного производства. Технология создания унифицированной системы ОВТ получила название КЛИВТ – «Климовский вектор тяги» (в английском написании – Klimov’s Vectoring Thrust, KLIVT).

МиГ-29ОВТ (МиГ-29М №156) в демонстрационном полете с ОВТ, август 2005 г.

ОВТ на «мигах»: перспективы применения
По мнению руководства РСК «МиГ», самолеты МиГ-29М и МиГ-29М2 представляют собой будущее поколение модификаций популярного истребителя МиГ-29, выпущенного к настоящему времени в количестве около 1500 экземпляров. Если МиГ-29СМТ рассматривается как основной вариант модернизации ранее построенных МиГ-29, то МиГ-29М и МиГ-29М2 будут самолетами новой постройки, которую, при получении соответствующих заказов, планируется начать в ближайшее несколько лет. А перспективы у таких заказов весьма серьезные. Как известно, МиГ-29М и МиГ-29М2 будут представлены на тендер, который планируют объявить ВВС Индии по программе MRCA (Multirole Combat Aircraft), предусматривающей закупку и лицензионное производство 126 перспективных многоцелевых истребителей для замены снимаемых с вооружения истребителей третьего поколения МиГ-23МФ и дополнения парка остающихся в строю ВВС этой страны самолетов МиГ-29 и «Мираж» 2000H (см. «Взлёт» №3/2005, стр. 7).

Одноместный МиГ-29М («9-61») и двухместный МиГ-29М2 («9-67») имеют максимальную степень унификации конструкции, оборудования и вооружения. Унифицированными на них являются даже головные части фюзеляжа и фонари кабины. Все отличия заключаются в том, что вместо кресла и информационно-управляющего поля в кабине второго летчика на одноместной машине размещается дополнительный топливный бак. Кроме того, по конструкции, оборудованию и вооружению МиГ-29М/М2 в значительной степени унифицированы с корабельными истребителями МиГ-29К («9-41») и МиГ-29КУБ («9-47»), строящимися в настоящее время по заказу ВМС Индии. Первый полет опытного экземпляра МиГ-29КУБ намечен на декабрь этого года, опытного экземпляра МиГ-29К – на весну 2006 г. Серийные поставки 12 МиГ-29К и четырех МиГ-29КУБ в Индию по контракту от 20 января 2004 г. должны начаться в 2007 г. и продолжаться до 2009 г., после чего возможно производство по опциону еще 30 таких машин (подробнее об этой программе – см. «Взлёт» №2/2005, стр. 22-31).
Важной особенностью самолетов МиГ-29М и МиГ-29М2 является также высокая общность с выпускаемым сейчас модернизированным МиГ-29СМТ по составу бортового радиоэлектронного оборудования и вооружения. В результате, большинство испытательных полетов в интересах программ МиГ-29СМТ и МиГ-29К могут быть зачтены и по программе МиГ-29М/М2, поэтому сроки создания и освоения производства последних могут быть очень короткими.
В настоящее время в испытаниях по тематике новых модификаций МиГ-29 принимают участие девять самолетов: три МиГ-29СМТ, два МиГ-29УБ, два опытных МиГ-29К (№311 и 312, переоборудованные из опытных самолетов предыдущего типа «9-31»), МиГ-29М2 №154 (переоборудован из четвертого летного экземпляра МиГ-29М типа «9-15») и МиГ-29ОВТ №156 (переоборудован из последнего предсерийного самолета МиГ-29М типа «9-15»). На самолете №154 уже отработана конструкция и аэродинамика новой унифицированной головной части фюзеляжа самолетов МиГ-29М/М2/К/КУБ и связанные с ней бортовые системы, а также (впервые на самолетах МиГ-29) испытана коротковолновая радиосвязь. На трех МиГ-29СМТ и двух МиГ-29УБ завершается летная отработка унифицированного БРЭО и вооружения. МиГ-29ОВТ №156 используется как летающая лаборатория для доводки двигателей РД-33 с ОВТ. Двигатели с отклоняемым вектором тяги станут основой силовой установки будущих серийных МиГ-29М и МиГ-29М2.
Применение всеракурсного отклонения вектора тяги на этих самолетах позволит осуществлять не только управление истребителем на маневре (в т.ч. на режимах сверхманевренности – на очень больших углах атаки и минимальных скоростях), но и стабилизацию параметров полета по всем трем осям при обычном пилотировании, обеспечивая сокращение затрат на балансировку и, соответственно, расхода топлива. Пространственное ОВТ дает возможность получать большие угловые скорости крена и обеспечивать эффективное управление по курсу при полете на больших углах атаки, когда традиционные аэродинамические органы управления значительно утрачивают свою эффективность, а также существенно увеличивать угловые скорости по тангажу.
Вообще, применение всеракурсного ОВТ сделает управление МиГ-29М/М2 более точным, более уверенным и более энергичным, практически не зависимым от величины угла атаки, причем как при выполнении элементов сверхманевренности, так и при традиционном пилотировании. Это не только будет давать МиГ-29М/М2 как дополнительные серьезные преимущества в воздушном бою, но и существенно снизит нагрузку на летчика (экипаж), позволив ему больше внимания уделять непосредственно решению боевых задач. А внешнюю, демонстрационную сторону применения ОВТ на самолете типа МиГ-29М можно увидеть на МАКС-2005. Без сомнения, зрителей в небе над Жуковским ждут приятные сюрпризы!

Елена КУЗОВКОВА Фоторепортаж Максима КУЗОВКОВА
СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ

Схема управляющих моментов ступени:
Для управления полетом ЛА по каналам (плоскостям) тангажа курса и крена (рис. 22.1) используются различные типы систем управления вектором тяги (СУВТ), т. е. различные органы управления. Прежде чем выбрать ту или иную СУВТ необходимо определить потребный управляющий момент для конкретного изделия (потребную управляющую силу).
Мт — момент тангажа; Мр — момент рыкания; Мкр — момент крена.
В настоящей главе рассмотрен общий подход определения потребного управляющего момента и шарнирного момента органов управления. Большое место отводится рассмотрению различных типов СУВТ и методам расчета боковых управляющих сил.
ПОТРЕБНЫЕ УПРАВЛЯЮЩИЕ СИЛЫ
Система управления вектором тяги совместно с приводом входят в состав контура управления ЛА (ступенью) и являются его исполнительным звеном. СУВТ состоит из органов управления, привод — из рулевой машинки, передаточного механизма и датчика обратной связи.
СУВТ создает силы и моменты для программного разворота и стабилизации положения изделия, а привод осуществляет по определенному закону перемещения и удержание органов управления в заданном направлении. Принцип функционирования СУВТ состоит в том, что поступающий из усилительно-преобразовательного блока в рулевую машинку сигнал, преобразуется в перемещение управляющего элемента, а силовая часть рулевой машинки развивает необходимое для соответствующего перемещения органа управления усилие.
Для выбора в процессе проектирования характеристик СУВТ и необходимо знать величину потребного управляющего момента для каналов (плоскости)

Схема влияния горизонтального ветра на возмущение ступени ЛА в плоскости тангажа машинки развивает необходимое для соответствующего перемещения органа управления усилие
тангажа, курса и крена. Момент для канала тангажа состоит из двух составляющих — момента, необходимого для программного разворота ступени, и момента стабилизации. Потребный управляющий момент для каналов курса и крена обеспечивает стабилизацию ступени в этих плоскостях.
Как правило, потребный управляющий момент по тангажу М.г значительно превосходит момент для стабилизации по крену, поэтому при совмещении СУВТ управления по тангажу и крену в качестве исходного принимается потребный управляющий момент по тангажу.
Потребный управляющий момент для стабилизации изделия складывается из моментов, вызванных случайными факторами, такими как возмущения, возникающие в момент разделения ступеней, возмущения от действия ветровых нагрузок и от суммарного эксцентриситета (смещения) вектора тяги относительно центра масс ЛА. Первые два вида возмущений относятся к внешним, третий — к внутренним возмущениям.
При расчете ветровых нагрузок необходимо иметь статистические данные о законе распределения горизонтальной составляющей скорости ветра в зависимости от высоты, характеристики порывов ветра, угла траектории изделия, аэродинамические характеристики, а также расстояние между центром масс и центром давления изделия.
Действие горизонтального ветра эквивалентно изменению угла атаки, вызывающему появление возмущений подъемной силы Yy и возмущающего момента Му’
а) по тангажу (22.2) 
б) по курсу (рис. 22.3), аналогично

Схема влияния горизонтального ветра на возмущение ступени ЛА по курсу

В зависимостях (22.1). (22.4) Су С^ а> — производные коэффициентов подъемной силы и момента по углу атаки а соответственно; Хц д, Хц м — расстояние от носика изделия до центра давления и центра масс соответственно; Аав т, Д|3В к — приращение угла атаки от действия горизонтального ветра в плоскости тангажа и курса соответственно; q’ — скоростной напор; Sm — площадь миделевого сечения.
Эксцентриситет вектора тяги обусловлен несовпадением линии действия реактивной силы с геометрической осью ракеты. Основные нарушения симметрии РДТТ и газового потока возникают за счет производственных допусков на основные узлы (элементы) двигателя неравномерной деформации двигателя и его сопловой полости в процессе хранения, транспортировки и запуска, неравномерности уноса массы материала с боковой поверхности соплового блока в процессе его функционирования.
Эксцентриситет реактивной силы оказывает основное влияние на возникновение возмущающих факторов при движении ЛА на активном участке траектории. Угловой эксцентриситет реактивной силы (угол между вектором тяги и осью сопла 0 обусловлен несимметричными возмущениями газового потока в полости соплового блока.
Суммарный эксцентриситет тяги состоит из трех составляющих: газодинамического, технологического и деформационного эксцентриситетов.
В общем случае при газодинамическом, технологическом и деформационном эксцентриситетах тяги возмущающие силы носят случайный характер, они взаимосвязаны и взаимообусловлены и, таким образом, оказывают влияние друг на друга. Однако учесть это влияние весьма сложно, поэтому будем полагать, что возмущающие силы независимы друг друга. В этой связи среднеквадратичное суммарное значение возмущающих сил Рэ1 можно определить по соотношению 
Газодинамический эксцентриситет тяги обусловлен несимметричными возмущениями газового потока как в сужающейся, так и расширяющейся частях соплового блока.
Относительная боковая возмущающая сила, обусловленная несимметрией предсопловох’о объема и входной части сопла и распространяющаяся по всему соплу, включая выходное сечение, может быть определена на основе теории возмущений одномерного сверхзвукового течения по соотношению

где Ру.а =-Ру.а/-Ру.кр> Му.а =Му.а/(Ру.крГу.кр) — относительная боковая возмущающая сила и возмущающий момент в выходном сечении сопла; Р кр — боковая сила в критическом сечении сопла при x = 0fvf2 — функции, зависящие от профиля расширяющейся части сопла г(х) и

Возмущение силы и моменты в выходном сечении сопла
свойств продуктов сгорания п =

Связь между боковой возмущающей силой и возмущающим моментом в выходном сечении сопла определяется по дополнительным соотношениям (рис. 22.4)

или 
где dPу а — приращение боковой силы на участке х. (х + dx), обусловленное несимметричностью распределения давления на внутреннюю стенку сопла.
Эксцентриситет тяги из-за нарушения симметрии потока в области выходной части сопла можно определить по результирующим силам давления на неуравновешенную часть сопла. При наличии косого среза (при малом значении у) 
где у — угол между плоскостями косого среза и поперечного сечения; произведение Рау — площадь боковой поверхности косого среза.
Значение силы по оси сопла х можно определить по соотношению

Угловой эксцентриситет (угол между направлением силы тяги и осью сопла) в этом случае будет равен

Газодинамический эксцентриситет тяги также зависит от противодавления и изменяется в процессе работы двигателя за счет неравномерного разгара, главным образом, сужающейся и расширяющейся частей сопла. Для малогабаритных РДТТ газодинамический эксцентриситет тяги может составлять 3′-12′.
Технологический эксцентриситет обусловлен несимметрией корпуса заряда ТТ и других элементов двигателя относительно оси изделия. Эти отклонения, как правило, связаны с производственными допусками на изготовление и сборку двигателя и ракеты.
Значения возможных перекосов, обусловленные погрешностями технологического характера, определяются по допускам на изготовление и сборку РДТТ, а положение центра масс (смещение по радиусу изделия) может быть определено как расчетным (по чертежам эскизного или технического проекта), так и опытным путем на специальном балансировочном стенде.
Значение технологического эксцентриситета лимитируется точностью изготовления отдельных элементов (агрегатов) и сборки двигателя.
Деформационный эксцентриситет является следствием несимметричной деформации корпуса двигателя и сопла и возникает в связи с действием на корпус двигателя и сопловой агрегат силовых и температурных факторов. К числу силовых факторов можно отнести давление и, особенно, скорость его роста для периода воспламенения и выхода РДТТ на стационарный режим работы. Массовые и инерционные силы, возникающие при хранении, транспортировке и в полете под действием перегрузок, также могут оказывать влияние на значение и изменение деформационного эксцентриситета.
Значение деформационного эксцентриситета зависит от конструктивных особенностей двигателя, а также от точности изготовления (отдельных элементов) и сборки РДТТ.
Технологический и деформационный эксцентриситеты тяги, связанные с факторами технологического характера и несимметричной деформацией во время полета изделия, а также упругие колебания корпуса приводят к смещению центра масс ракеты (ступени) относительно продольной оси. Это обстоятельство вызывает возникновение линейного эксцентриситета тяги е и возмущающего момента Му т д.
Возмущающий момент определяют по соотношению

Перекос и неравномерный разгар по периметру и длине проточной части соплового блока приводит также к возникновению линейного и углового эксцентриситетов тяги.
При отклонении оси сопла от оси ракеты на угол (рис. 22.5) боковая возмущающая сила и возмущающий момент могут быть определены по соотношениям

где L — длина ЛА.

Зависимость относительной боковой силы от угла О
В период разделения ступеней кроме эксцентриситета тяги и ветровых возмущений на изделие действуют возмущающие факторы, обусловленные процессом разделения. К ним относятся:
- 1) разность тяг отсечных устройств (если они имеются на двигателе);
- 2) несинхронность срабатывания соединительных механизмов (соединительные болты, штокеры идр.); разность тяг сопел в случае использования для двигателя соплового блока многосопловой конструкции и др.
Потребная величина возмущающих сил и моментов должна быть заданной функцией от времени работы двигателя той или иной ступени и является исходной при выборе СУВТ с соответствующими управляющими силами. Потребный управляющий момент по плоскостям курса и крена должен обеспечить компенсацию максимального возмущающего момента, обусловленного действием всех возмущающих факторов. Потребный же управляющий момент по плоскости тангажа должен обеспечить с одной стороны программный разворот ступени, с другой — скомпенсировать действие всех возмущающих факторов.
Программное движение центра масс изделия (ступени) задается, в свою очередь, программой изменения угла тангажа фпр, по которой можно определить программу изменения угла атаки апр.
Управляющий программный момент Му„р, необходимый для создания программного значения угла атаки а11р, можно определить по соотношению

где 
Действие отмеченных возмущающих факторов, обусловленных ветровыми нагрузками, процессом разделения ступеней и эксцентриситетом вектора тяги при движении изделия для первых и последующих ступеней различно. Так, для первой ступени превалирующее влияние на максимальный возмущающий момент оказывают ветровые нагрузки и возмущающие факторы, возникающие при разделении ступеней; их и следует учитывать при расчете потребного управляющего момента первой ступени.
Для второй ступени ЛА в связи с уменьшением плотности атмосферы влияние возмущающего фактора за счет ветровых нагрузок уже не является превалирующим. Здесь при определении потребного управляющего момента (для начального периода полета после отделения первой ступени) необходимо учитывать все возмущающие факторы: ветровые нагрузки, возмущения, связанные с разделением ступеней и эксцентриситетом вектора тяги.
Для третьей ступени необходимый управляющий момент рассчитывается для начального периода движения изделия после отделения второй ступени с учетом возмущающих факторов, обусловленных разделением ступеней и эксцентриситетом вектора тяги, т. е. без учета ветровых нагрузок.
По величине потребного управляющего момента для каждой ступени при известных основных габаритных размерах ракеты и расстояний между центром масс изделия и точкой приложения управляющей силы можно определить потребную управляющую силу.