Система отсчета – это совокупность тела отсчета, со связанной с ним системой координат и прибором для измерения времени.
- Что такое система отсчета. Афинная и декартовая системы координат
- Цилиндрическая и сферическая системы координат
- Радиус-вектор, вектор перемещения
- Физика
- Механическое движение. Система отсчёта. Закон относительности движения
- Уравнения движения. Радиус-вектор. Проекция вектора
- Траектория. Путь. Перемещение
- Равномерное прямолинейное движение: скорость и уравнение движения
- Путь и перемещение при равномерном прямолинейном движении
Что такое система отсчета. Афинная и декартовая системы координат
Если рассматривать все системы отсчета относительно кинематики – они аналогичные. В кинематике не указываются преимущества одной системы отсчета при сравнении с другой. Для удобства решения выбирается наиболее приемлемая система.
Чтобы описать пространство, в котором происходит движение материальной точки, система отсчета связывается с пространственной системой координат.
Системой пространственных координат называют совокупность определений, которая может реализовать метод координат, то есть определение положения точки или тела с помощью чисел или символов.
Числа, способные указать положение выбранной точки в трехмерном пространстве, называются координатами этой точки.
Аффинная система координат – это три линейно независимых вектора (координатных осей), выходящие из одной точки, то есть из начала отсчета.
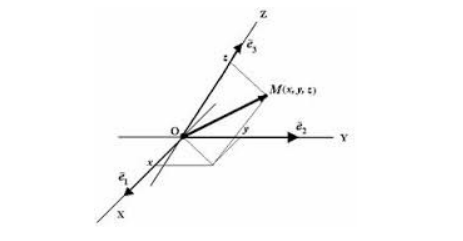
Рисунок 1 . Положение точки в афинной системе координат
Данный случай указывает на то, что определение положения материальной точки М в пространстве происходит при помощи радиус-вектора r → , проведенного через начало координат в заданную точку, движение может быть представлено в виде векторной суммы независимых перемещений вдоль трех пространственных осей выбранной системы координат.
Чаще используется декартова система координат, образованная взаимно перпендикулярными осями x , y , z . Она применима для описания прямолинейного движения и движения по незамкнутым или нецикличным кривым. Представляет из себя наглядную геометрическую интерпретацию с несложными вычислениями.
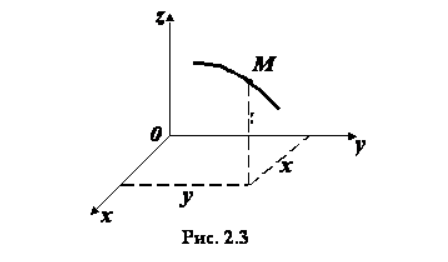
Рисунок 2 . Положение точки в декартовой системе координат
Отложенные от начала координат и вдоль осей единичные векторы называют ортами i → ; j → ; k → .
Расположение точки М находится в зависимости от значения радиус-вектора r → , соединяющего начало координат О с заданной точкой М :
r → = x i → + y j → + z k → ,
x , y , z являются декартовыми координатами точки М или проекциями радиус-вектора на соответствующие оси координат, первая производная которого дает значение мгновенной скорости точки. При известных значениях изменений во времени координат или радиус-вектора, то есть определение x = x ( t ) ; y = y ( t ) , задается характер движения тела в пространстве.
Чтобы однозначно определить положение точки М в пространстве, то предполагают наличие зависимости радиус-вектора r → от параметра t (времени) таким образом, что каждому значению параметра t соответствует одно значение функции:
r → = r → ( t ) = x ( t ) i → + y ( t ) j → + z ( t ) k → .
Данное равенство получило название кинематического уравнения движения материальной точки М в векторной форме.
Цилиндрическая и сферическая системы координат
Чтобы описать криволинейное и аффинное движение, применяют криволинейные системы координат, которые упрощают форму записи законов движения тел для облегчения вычисления. Чаще всего используют цилиндрические и сферические системы координат.
Представление цилиндрической системы координат включает в себя трехмерную ось координат, которая является обобщением полярной на трехмерное пространство добавлением третьей координаты, задающей смещение произвольной точки М вдоль оси O Z относительно координатной плоскости O X Y .
Положение точки М может быть определено скалярами ρ , φ и z , где ρ – характеризует расстояние от точки М к оси O Z , φ – является углом, образованным проекцией радиус-вектора точки М на плоскость O X Y с положительным направлением О Х , z – проекцией точки М на ось O Z .
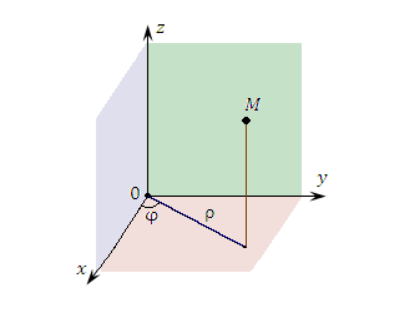
Рисунок 3 . Цилиндрические координаты точки М
Связь между декартовыми и цилиндрическими координатами может быть задана при помощи формул:
x = ρ cos φ ; y = ρ sin φ ; z = z ; ρ = x 2 + y 2 ; t g φ = y x .
Сферическая система координат характеризуется тройкой скалярных величин, которые определяют положение точки в пространстве, состоящие из длины ее радиус-вектора ρ и двух углов: φ – угла, образованного проекцией радиус-вектора точки М на плоскость O X Y с положительным направлением О Х , θ – угла, располагаемого между радиус-вектором точки М и осью O Z .
Необходимо рассмотреть сферическую систему координат O ρ θ φ , совмещенную с декартовой O x y z , причем с имеющимися пределами изменения сферических координат: 0 ≤ φ ≤ 2 π , 0 ≤ ρ ≤ ∞ .
Рисунок 4 показывает, что можно вывести формулы, связывающие сферические и декартовые координаты:
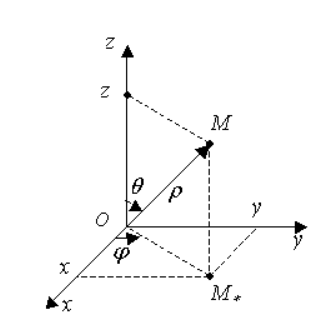
Рисунок 4 . Сферические координаты точки М
x = ρ cos φ sin θ , y = ρ sin φ sin θ , z = ρ cos θ .
Имеются другие системы криволинейных координат, с помощью которых возможно нахождение координат заданной точки: параболические, гиперболические, эллиптические и другие.
Система отсчета выбирается индивидуально относительно каждого случая в отдельности, учитывается особенность движения тела, с помощью которой определяется наиболее простой закон движения заданного тела или точки.
Радиус-вектор, вектор перемещения
Для описания движения материальной точки в каждый момент времени необходимо указать ее положение относительно выбранной системы отсчета. Для этого с телом отсчета связывают систему координат – способ, с помощью которого задают числа (координаты точки), полностью определяющие положение материальной точки относительно тела отсчета. Важнейшими системами координат являются прямоугольные декартовы системы координат (рис 1.1), в которых положение точки А однозначно определяется ее координатами x, y, z
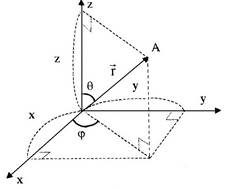 Рис. 1.1 Рис. 1.1 | по отношению к началу координат О, связанному с телом отсчета. Поскольку тело отсчета и материальная точка определяют в пространстве физически выделенное направление OA, то положение материальной точки в данной системе координат (XYZ) можно характеризовать одной векторной величиной  – радиус-вектором. Задать радиус-вектор положения материальной точки А – означает: указать, на каком расстоянии от тела отсчета (модуль радиус-вектора – радиус-вектором. Задать радиус-вектор положения материальной точки А – означает: указать, на каком расстоянии от тела отсчета (модуль радиус-вектора  ) и в каком направлении относительно выбранных координатных ) и в каком направлении относительно выбранных координатных |
направлений (полярный – j и азимутальный – q углы) находится материальная точка А.
Из рис. 1.1 непосредственно видно, что проекции радиус-вектора на оси координат определяют координаты материальной точки x, y, z.
Преимущество векторного способа описания проявляется в том, что он компактнее координатного. Однако необходимо четко понимать, что векторный способ описания положения точки требует задания трех чисел: r, j, q так же, как и координатный.
Зная координаты точки x, y, z, нетрудно получить значения r, j, q:
 ,
,  ,
,  , (1.1)
, (1.1)
где cosj, cosq – направляющие косинуса радиус-вектора .
Если известны числа r, j, q, то координаты x, y, z частицы определяются соотношениями:
 ,
,  ,
,  . (1.2)
. (1.2)
При движении материальной точки ее положение относительно начала координат с течением времени изменяется, а следовательно может изменяться как модуль, так и направление радиус-вектора .
Следовательно, радиус-вектор является функцией времени:
 ,
, 
 ,
,  ,
,  . (1.3)
. (1.3)
Эти функции, которые однозначно определяют характер и вид движения частицы, называются кинематическими уравнениями движения материальной точки. При этом конец радиус-вектора описывает в пространстве линию – траекторию движения.
Изменение положения материальной точки при ее движении из некоторого начального положения в момент времени t, характеризуемого радиус-вектором , в другое положение в момент времени  , характеризуемого радиус-вектором
, характеризуемого радиус-вектором  , определяется вектором
, определяется вектором  , который называется вектором
, который называется вектором
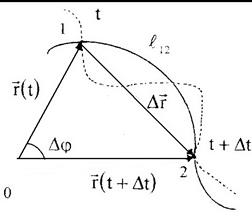 Рис. 1.2 Рис. 1.2 | перемещения (рис. 1.2). Здесь следует четко понять, что вектор перемещения характеризует результирующее изменение положения материальной точки за промежуток времени  , и не содержит в себе информации ни о виде траектории, ни о характере движения по ней. Кроме этого, даже из рисунка следует, что величина перемещения , и не содержит в себе информации ни о виде траектории, ни о характере движения по ней. Кроме этого, даже из рисунка следует, что величина перемещения  , путь S12, пройденный материальной точкой, и длина дуги траектории l12, заключенной между положениями 1 и 2, в общем случае , путь S12, пройденный материальной точкой, и длина дуги траектории l12, заключенной между положениями 1 и 2, в общем случае |
различны по величине, то есть
 . (1.4)
. (1.4)
Выводы: Положение материальной точки в выбранной системе отсчета, характеризуется радиус-вектором. При движении частицы ее радиус-вектор изменяется. Закон этого изменения с течением времени полностью определяет вид траектории частицы и характер движения по ней. Вектор перемещения описывает изменение положения за данный промежуток времени.
Контрольные вопросы
1.2. Охарактеризуйте движения частицы, соответствующие соотношениям а)  , б)
, б)  .
.
1.3. Используя рис.1.1, убедитесь в справедливости соотношений (1.1) и (1.2).
Физика
План урока:
Механическое движение. Система отсчёта. Закон относительности движения
Механическим движением в физике называется изменение с течением времени положения тела (или его частей) в пространстве относительно других тел.
То есть, чтобы сказать, что тело или система совершает механическое движение, нам необходимо: 1) наблюдать его во времени; 2) сравнивать его положение с положением какого-то другого тела (относительно этого тела).
Например, пассажир в едущем автомобиле неподвижен относительно кресла, на котором он сидит, но он движется относительно людей, стоящих на автобусной остановке и самой остановки. А сама автобусная остановка неподвижна относительно стоящих людей, ждущих автобус (см. рисунок 1). Однако она движется относительно проезжающих мимо машин. В первом случае наблюдаемым объектом был человек в машине, а точкой отсчета кресло и люди на остановке. Во втором случае наблюдаемой была автобусная остановка, а точками отсчета – люди на остановке и проезжающие мимо машины.
Рисунок 1 – Иллюстрация к примеру
Из примеров можно сделать вывод, что важно, какой именно объект находится под наблюдением и относительно какого объекта – тела отсчета – рассматривается его движение. Отсюда можно сформулировать закон относительности движения: характер движения тела зависит от того, относительно какого объекта мы рассматриваем данное движение.
Тело (или точка) отсчета, связанная с ним система координат и часы, вместе образуют систему отсчета. То есть все сказанное выше можно переформулировать в одно предложение: для наблюдения механического движения важно в какой системе отсчета будет происходить наблюдение.
Рисунок 2 – Пример системы отсчета (наблюдаемы объект – летящий мяч, тело отсчета – камень, лежащий в начале координат, система координат и секундомер для отсчета времени)
Однако объекты могут быть очень сложными для наблюдения. Например, автомобиль едет по прямой несколько километров и необходимо описать его движение относительно камня на обочине. Казалось бы, все просто. Но как именно описать движение автомобиля, если корпус его движется по прямой, а колеса совершают вращательные движения.
Для удобства решения подобных задач принято упрощение: если размер и форма тела в данной задаче не играют важной роли для наблюдателя, можно считать это тело за материальную точку.
Материальная точка – это такое тело, размером и формой которого в условиях данной задачи можно пренебречь.
Приведем пример: когда автобус едет из города А в город Б, его можно рассматривать как материальную точку. Когда пассажир идет из одного конца этого автобуса в другой, считать автобус материальной точкой нельзя. В общем случае можно сказать, что тело можно считать материальной точкой, если его размеры значительно меньше расстояния, на которое оно перемещается.
Уравнения движения. Радиус-вектор. Проекция вектора
Для описания движения тела необходимо уметь рассчитывать его положение в каждый момент времени. Как это сделать?
Самый очевидный способ – координатный. Если вернуться к примеру на рисунке 2, можно увидеть, что летящий мяч в каждый момент времени имеет три координаты по осям OX, OY и OZ. Эти координаты являются функциями времени (т.е. они зависят от времени), а значит, их можно записать в виде системы:
Вид этих уравнений будет зависеть от многих вещей: от того, с какой силой бросили мяч в начале, от массы мяча, под каким углом его бросили и так далее. В любом случае, если эти уравнения заданы, можно найти координаты (то есть положение) тела в любой момент времени. Поиск этих уравнений – основная задача кинематики.
Эта система является кинематическими уравнениями движения тела или материальной точки, записанными в координатной форме. Повторим: если вид уравнений движения задан, можно узнать координату движущейся точки в любой момент времени.
В общем случае, координат три, но иногда можно обойтись двумя или даже одной координатой. Например, для описания движения бильярдного шара достаточно двух координат (так как шар не может двигаться вверх и вниз), а для описания движения шарика, катящегося по прямому горизонтальному желобку достаточно одной координаты (шарик не может двигаться вверх-вниз и вправо-влево).
Еще один способ описания движения – векторный.
*Перед дальнейшим прочтением данной статьи желательно вспомнить основную теорию по теме «Векторы» и «Метод координат»
Вектор, проведенный из начала координат к материальной точке, называется радиус-вектором (см. рисунок 3).
Рисунок 3 – Радиус-вектор (серой линией изображены траектория движения материальной точки, r1 и r2* радиус-векторы, проведенные к этой материальной точке в разные моменты времени)
Радиус-вектор проведенный к материальной точке в разные моменты времени будет разным. Значит, его тоже можно представить, как функцию времени:
r = r(t)
Такая функция и будет уравнением движения в векторной форме. Если ее вид задан, можно описать движение тела с той же полнотой, как и при координатной записи.
Еще раз обозначим отличия: при записи уравнения движения в координатной форме в каждый момент времени наблюдающий будет знать три координаты тела; при записи в векторной форме в каждый момент времени известен радиус-вектор (его модуль и направление). Обе записи равносильны.
*На письме векторы обычно обозначаются стрелкой сверху, над величиной. Однако в печатном тексте не всегда удобно нагромождать формулы дополнительными знаками, поэтому в печати векторные величины пишут просто жирным шрифтом. В данной статье далее жирным шрифтом будут написаны только векторные величины.
Покажем, что векторная и координатная записи равносильны. Для этого необходимо вспомнить, как построить проекцию вектора на ось (см. рисунок 4).
Рисунок 4 – Построение проекции вектора на ось
Чтобы построить проекцию вектора на ось, необходимо опустить перпендикуляра из начала и конца вектора на эту ось. Длина получившегося отрезка между проекциями начала и конца вектора, взятая со знаком «+», если вектор а сонаправлен с осью Х, или со знаком «-», если вектор а противонаправлен оси Х, — это и есть искомая проекция.
Если вектор выходит из начала координат, задача облегчается – необходимо опустить перпендикуляр только из конца вектора.
Напоминания из геометрии:
два вектора равны, если они параллельны или лежат на одной прямой, сонаправлены, а их модули равны;
проекции равных векторов равны.
Рассмотрим пример (см. рисунок 5)
Рисунок 5 – Задача на нахождение проекции векторов
Предлагаем читателю самому подумать, а затем сравнить свои рассуждения с приведенными ниже.
Итак, вектор а: его начала соответствует координате хн=1, а конец хк = 4. Значит ax = хк – хн = 4-1 = 3. Вектор b: его начало лежит в точке хн=2, а конец хк =0. Значит bx = хк – хн = 0-2 = -2.
В двумерном случае, проецировать нужно на две оси, но принцип остается тем же.
Иногда еще нужно находить составляющие компоненты вектора ах и ау. Рассмотрим пример, для простоты возьмем вектор, выходящий из начал координат (см. рисунок 6).
Сумма векторов ах и ау равна а. Модули векторов ах и ау численно равны координатам точек, куда попали перпендикуляры, опущенные из конца вектора а на оси ОХ и ОУ.
Еще следует отметить, что, если известен угол β между вектором а и осью ОХ, воспользовавшись основами тригонометрии, можно найти величины проекций:
Если бы вектор а совпадал с радиус-вектором какой-нибудь точки, то величины ах и ау совпадали бы с координатами тела по осям ОХ и ОY.
Способ с использованием тригонометрических функций удобен, когда координата конца вектора попадает в нецелое число и опустив перпендикуляр на ось его трудно найти точно. В физических задачах такое часто случается.
Рисунок 6 – Нахождение компонент вектора а
Рассмотрим пример (см. рисунок 7). Модуль вектора r равен 2. Сам вектор направлен под углом в 45 градусов к оси ОХ. Необходимо найти величины проекций (они же координаты) этого вектора на оси ОХ и ОУ.
Рисунок 7 – Задача на нахождение проекций вектора в двумерном пространстве
В общем случае радиус-вектор находится в трехмерном пространстве (см. рисунок 8). Построение проекции осуществляется по тому же принципу, что и в рассмотренных выше примерах. Когда строятся проекции на оси ОХ и ОУ, перпендикуляр сначала опускается на плоскость, в которой лежат оси ОХ и ОУ, а затем точка, в которую упал перпендикуляр к плоскости, проецируется на оси ОХ и ОУ.
Точки, в которые попал перпендикуляры к осям – rx, ry, rz – это и есть координаты x, y, z тела в текущий момент времени.
Следует оговориться, что большинство задач 10-го класса будут ограничиваться двумерным пространством.
Рисунок 8 – Построение проекций радиус-вектора
Траектория. Путь. Перемещение
Траектория – это линия, вдоль которой движется тело.
Траектория движения может быть прямолинейной, если тело движется по прямой линии, и криволинейной, если тело движется по кривой.
Путь (S), пройденный телом, равен длине траектории.
Перемещение (r)* – это вектор, проведенный из начала пути в конец.
В случае прямолинейного движения путь и модуль перемещения тела совпадают (см. рисунок 9а). В случае криволинейного – путь и перемещение различаются (см. рисунок 9б), так как длина линии движения тела больше длины вектора, соединяющего начало и конец траектории.
Рисунок 9 – Путь (S) и перемещение (r) при прямолинейном (а) и криволинейном (б) движении
*Иногда перемещение так же, как и путь, называют буквой S — (на письме с вектором над ней, при печати — жирным шрифтом, так как это векторная величина). В данной статье, чтобы не путаться, перемещение называется только буквой r. В целом, обозначения равноправны, поэтому при решении задач можно использовать то, которое удобнее. Однако не стоит забывать отмечать, что именно обозначено под той или иной буквой.
Равномерное прямолинейное движение: скорость и уравнение движения
Путь и перемещение при равномерном прямолинейном движении
Прямолинейное равномерное движение уже рассматривалось в курсе физики ранее, однако приведем основные определения.
Прямолинейное движение – это движение по прямой линии. Равномерное движение – такое, в процессе которого тело за равные временные промежутки проходит один и тот же путь. Если объединить эти два определения получится третье:
- равномерное прямолинейное движение – это такое движение, в ходе которого 1) тело совершает движение по прямой линии; 2) за одинаковые временные промежутки проходит одинаковый путь.
Зная определения пути и перемещения, это определение можно упростить: прямолинейное равномерное движение тела – это такое движение, в процессе которого тело за одинаковые временные промежутки совершает равные перемещения.
Важной характеристикой является скорость механического движения. Предположим, что при равномерном прямолинейном движении тело за промежуток времени △t перемещается из точки А в точку Б (см. рисунок 8). Радиус-вектор, проведенный в точку A обозначим r0, а радиус-вектор в точку Б обозначим r1. Изменение радиус-вектора назовем △r – нетрудно заметить, что это есть перемещение тела за время △t.
Рисунок 8 – Поиск перемещения тела через радиус-векторы при равномерном прямолинейном движении
Тогда скорость движения (v) будет вычисляться по формуле:
Так как △r – вектор, △t – скаляр, скорость v тоже будет вектором, сонаправленным перемещению.
Если тело начинает двигаться в момент начала отсчета, то △t = t*. Из правила сложения векторов следует, что △r = r1 — r0. Тогда выражение для скорости можно переписать в виде:
Из этого выражения следует:
Это выражение можно применить к любому произвольно взятому моменту времени, поэтому можно опустить индекс в левой части и переписать:
Данное уравнение является уравнением движения при прямолинейном равномерном движении.
*Напоминание: символом △ (дельта) обозначают изменение какой-нибудь величины. Например △t = t – t1, где t – конечный момент времени, t1 – начальный. Если же начальный момент времени совпадает с началом отсчета t1 = 0, то △t = t – 0 = t.
Фактически уравнение равномерного прямолинейного движения означает, что радиус-вектор в произвольный момент времени t можно посчитать, сложив начальный радиус-вектор и приращение v*t.
Найдя проекции радиус-вектора и вектора скорости, можно разложить уравнение движения тела на три составляющие вдоль осей ОX, ОY и ОZ.
В этих выражениях r0x, r0y, r0z и vx, vy, vz – это компоненты изначальных векторов r0 и v вдоль осей ОХ, ОY и ОZ соответственно. И теперь можно перейти к скалярному виду:
Стоит отметить, что при проецировании какие-то компоненты вектора могут стать отрицательными, тогда знаки в выражениях поменяются на противоположные.
В рассмотренном выше примере движение происходит только вдоль оси ОХ (остальные координаты не изменяются). На рисунке 9 приведены проекции начальной (х0) и конечной (х1) точки на ось ОХ.
Рисунок 9 – Перемещение тела в координатном представлении
Уравнение координаты (х) движения будет выглядеть:
А это уже похоже на знакомую из прошедшего курса физики формулу для нахождения пути:
Если точка начала двигаться из начала отсчета S0 = 0, можно переписать эту формулу в виде:
Отсюда следуют известные уже формулы для нахождения скорости и времени при равномерном прямолинейном движении:
Приведем последний в этой статье пример: известно, что тело движется вдоль оси ОХ, начиная из точки x0 = 3 см. Скорость тела равна v = 5 м/с и направлена вдоль оси ОХ. Необходимо записать уравнение движения по координате х для этого тела.
Итак, для начала приведем все единицы измерения к СИ:
Теперь можно записывать уравнение для координаты х:
Из этого уравнения можно найти координату тела в любой момент времени. Например, через 2 секунды после начала отсчета тело находилось в точке:
x(2) = 0,03 + 5*2 = 10, 03.
А какой путь прошло тело к этому моменту? В начале оно находилось в точке x(2) = 0,03 м, а через 2 секунды оно стало находиться в точке x(2) = 10, 03. Значит за 2 секунды тело прошло:
S = x(2) – x0 = 10, 03 – 0,03 = 10 м.
А если скорость тела была направлена противоположно оси ОХ, как тогда выглядело бы уравнение движения?
Тогда проекция вектора скорости на ось ОХ была бы отрицательной и в уравнении знак перед скоростью поменялся бы на противоположный: