§1. Элементы векторной алгебры
В теоретической механике рассматриваются такие векторные величины как сила, моменты силы относительно точки и оси, момент пары сил, скорость, ускорение и другие.
1. Понятие вектора.
Вектор — это направленный отрезок, который характеризуется длиной и направлением.
Операции над векторами. Вектора можно складывать и умножать на число.
— сумма двух векторов есть вектор
α∙ — произведение вектора на действительное число есть вектор
— существует нулевой вектор
Рис.1. Сложение векторов
В математике все вектора являются свободными, их можно переносить параллельно самим себе.
В сумме двух векторов (рис.1,а) начало второго вектора можно поместить в конец первого вектора, тогда сумму двух векторов можно представить как вектор, имеющий начало в начале первого вектора, а конец в конце второго вектора. Применяя это правило для суммы нескольких векторов (рис.1,б) получаем, что суммой нескольких векторов является вектор замыкающий ломаную линию, состоящую из слагаемых векторов.
Операции над векторами подчиняются следующим законам (см. рис.2):
Рис.2. Операции над векторами
2. Проекцией вектора на ось
Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами, опущенными из начала и конца вектора на эту ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси, и отрицательной (-), если проекция направлена в противоположную сторону (см. рис.3).
Рис.3. Проекция вектора на ось
§2. Основные понятия статики
Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил.
Твердое тело. В статике и вообще в теоретической механике все тела считаются абсолютно твердыми. То есть предполагается, что эти тела не деформируются, не изменяют свою форму и объем, какое бы действие на них не было оказано. Материальной точкой будет называться абсолютно твердое тело, размерами которого можно пренебречь.
Под равновесием будем понимать состояния покоя тела по отношению к другим материальным телам.
1. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой.
В Международной системе единиц (СИ) силу измеряют в ньютонах (Н), килоньютонах (кН). Сила является величиной векторной.
Ее действие на тело определяется:
1) численной величиной или модулем силы
2) направлением силы
3) точкой приложения силы (рис.4).
Рис.4. Сила, приложенная к телу
Например, будем прикладывать к стулу одну и ту же по модулю силу F. При приложении силы сверху вниз стул остается в состоянии покоя; при положении силы снизу вверх — стул поднимается; изменим направление нагружения, приложим силу горизонтально к спинке стула — стул опрокинется. Так как во всех случаях направление и место приложения силы различны, то и результат действия силы на стул разный, несмотря на то, что модуль силы F во всех случаях одинаков.
Силу, как и другие векторные величины, изображают в виде направленного отрезка со стрелкой на конце, указывающей его направление.
Прямая DE, вдоль которой направлена сила, называется линией действия силы.
Понятия «линия действия» и «направление» близки, но не тождественны. Очевидно, что по линии действия можно определить направление с точностью до противоположного. Аналогично связаны понятия «модуль» и «величина» для вектора.
В тексте вектор силы обозначается латинскими буквами и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина — модуль.
2. Совокупность сил, действующих на какое-нибудь твердое тело, будем называть системой сил. Предполагается, что действие силы на тело не изменится, если ее перенести по линии действия в любую точку тела (конечно – твердого тела). Поэтому вектор силы называют скользящим вектором. Если силу перенести в точку, не расположенную на этой линии, действие ее на тело будет совсем другим.
3. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным.
4. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
Например, если системы сил, изображенных на рис. 5, а и рис. 5, б, уравновешены, то эти две системы сил будут эквивалентны друг другу.
Рис 5. Система сил:
а – заданная система сил; б – эквивалентная система сил
5. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю.
6. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Таким образом, равнодействующая — это сила, которая одна заменяет действие данной системы сил на твердое тело. Так как система сил F1 и F2 эквивалентна одной силе R (рис. 5, б), то сила R называется равнодействующей данной системы сил. Силы F1 и F2 в свою очередь могут называться составляющими силы R.
7. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой.
8. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга.
9. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной.
Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными.
Понятие о сосредоточенной силе является условным, так как практически приложить силу к телу в одной точке нельзя. Силы, которые мы в механике рассматриваем как сосредоточенные, представляют собою по существу равнодействующие некоторых систем распределенных сил.
В частности, обычно рассматриваемая в механике сила тяжести, действующая на данное твердое тело, представляет собою равнодействующую сил тяжести его частиц. Линия действия этой равнодействующей проходит через точку, называемую центром тяжести тела.
§3. Аксиомы статики
Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике.
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны (рис. 6).
Рис.6. Система сил, находящаяся в равновесии
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может.
Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу.
Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
Рис.7. Система сил
В самом деле, пусть на твердое тело действует приложенная в точке А сила (рис.7). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы
и , такие, что , . От этого действие силы на тело не изменится. Но силы и согласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В результате на тело. Будет действовать только одна сила
, равная , но приложенная в точке В.
Таким образом, вектор, изображающий силу , можно считать приложенным в любой точке на линии действия силы (такой вектор называется скользящим).
Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах.
Вектор , равный диагонали параллелограмма, построенного на векторах и (рис.8), называется геометрической суммой векторов и : .
Рис.8. Равнодействующая двух сил
Величина равнодействующей . Если векторы сил окажутся перпендикулярными, то
Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке.
Аксиома 4 (принцип противодействия). При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие.
Закон о равенстве действия и противодействия является одним из основных законов механики. Из него следует, что если тело А действует на тело В с силой , то одновременно тело В действует на тело А с такой же по модулю и направленной вдоль той же прямой, но противоположную сторону силой
(рис. 9). Однако силы и не образуют уравновешенной системы сил, так как они приложены к разным телам. Эта аксиома соответствует третьему закону Ньютона: действие всегда равно и противоположно противодействию. При этом необходимо помнить, что в аксиоме 4 рассматривается случай, когда силы приложены к разным телам и в этом случае система сил не является уравновешенной в отличие от случая действия сил в аксиоме 2.
Рис.9. Противодействие
Этот принцип утверждает, что в природе не существует односторонних явлений. На рис. 10 изображена балка, опирающаяся на стены концами А и В. Для выявления сил действия и противодействия отделим балку от стен. Тогда силы действия балки на стену выражаются силами DA и DB, приложенными к стенам, а силы противодействия — силами RA и RB, приложенными к балке, которые в дальнейшем будем называть реакциями.
Рис. 10. Опирание балки на опоры:
а – схема загружения балки; б – силы действия балки на
опоры и противодействия со стороны опор на балку
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Из принципа отвердения следует, что условия, необходимые и достаточные для равновесия абсолютно твердого тела, необходимы, но не достаточны для равновесия деформируемого тела, по форме и размерам тождественного с данным.
Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д.
Аксиома 6 (аксиома связей). Всякое несвободное тело можно рассматривать как свободное, если механическое действие связей заменить реакциями этих связей (пояснения к этой аксиоме в следующем параграфе).
Приведенные принципы и аксиомы положены в основу методов решения задач статики. Все они широко используются в инженерных расчетах.
Видео-урок «Аксиомы статики»
§4. Связи и их реакции
По определению, тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещения данного тела в пространстве, будем называть связью.
Например, тело лежащее на столе – несвободное тело. Связью его является плоскость стола, которая препятствует перемещению тела вниз.
Очень важен так называемый принцип освобождаемости, которым будем пользоваться в дальнейшем. Записывается он так:
Любое несвободное тело можно сделать свободным, если связи убрать, а действие их на тело заменить силами, такими, чтобы тело оставалось в равновесии.
Сила, с которой данная связь действует на тело, препятствуя тем ила иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи.
Так у тела, лежащего на столе, связь – стол. Тело несвободное. Сделаем его свободным – стол уберем, а чтобы тело осталось в равновесии, заменим стол силой, направленной вверх и равной, конечно, весу тела.
Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Когда связь одновременно препятствует перемещениям тела по нескольким направлениям, направление реакции связи также наперед неизвестно и должно определяться в результате решения рассматриваемой задачи.
Если в качестве физического тела рассматривать какой-либо элемент инженерного сооружения (балка, ферма, колонна, плита и т. п.), который передает давление на опоры, то реакции опор (связей) называют опорными реакциями. Реакции связей носят вторичное происхождение, они возникают как противодействие другим силам.
Все силы, кроме реакции связей, называют заданными силами. Термин «заданные силы» имеет глубокий смысл. Заданные силы чаще всего являются активными, т.е. силами, которые могут вызвать движение тел, например: сила тяжести, снеговая или ветровые нагрузки и т.п. Учитывая сказанное выше, будем подразделять силы на активные силы и реакции связей.
Одна из главных задач статики твердого тела — нахождение реакции связей. Для определения реакции связей необходимо найти величину этой реакции, линию и направление ее действия. Линия действия реакции обычно проходит через точку касания тела и связи. Численное значение реакции определяется расчетом, а направление реакции зависит от вида (конструкции) связи.
Для определения направления реакции необходимо установить особенности взаимодействия твердого тела со связями различного вида. Следует иметь в виду, что реакция всегда направлена противоположно направлению возможного перемещения тела при удалении связи.
Рассмотрим, как направлены реакции некоторых основных видов связей:
1. Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Такая поверхность не дает телу перемещаться только по направлению общего перпендикуляра (нормали) к поверхностям соприкасающихся тел в точке их касания (рис.11, а). Поэтому реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рис. 11, б), то реакция направлена по нормали к другой поверхности.
- Теоретическая механика. В помощь студенту
- Статика твердого тела
- Кинематика
- Динамика
- Примеры решения задач
- Решение примеров по теме: «Статика твердого тела»
- Пример 1. Условия равновесия
- Решение примеров по теме: «Кинематика»
- Пример 2. Уравнение траектории точки
- Решение примеров по теме: «Динамика»
- Пример 3. Основной закон динамики точки
- Элементы векторной алгебры
- Введение
- СТАТИКА
- СОЕДИНЕНИЕ ТЕЛ МЕЖДУ СОБОЙ. ВИДЫ СВЯЗЕЙ. РЕАКЦИИ СВЯЗЕЙ.
- ТЕОРЕМЫ СТАТИКИ
- СИСТЕМА СХОДЯЩИХСЯ СИЛ
Теоретическая механика. В помощь студенту
Теоретическая механика – это раздел механики, в котором излагаются основные законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика является наукой, в которой изучаются перемещения тел с течением времени (механические движения). Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория пластичности, теория механизмов и машин, гидроаэродинамика) и многих технических дисциплин.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел.
Механическое взаимодействие – это такое взаимодействие, в результате которого изменяется механическое движение или изменяется взаимное положение частей тела.
Статика твердого тела
Статика — это раздел теоретической механики, в котором рассматриваются задачи на равновесие твердых тел и преобразования одной системы сил в другую, ей эквивалентную.
- Основные понятия и законы статики
Сила как вектор характеризуется точкой приложения, направлением действия и абсолютным значением. Единица измерения модуля силы – Ньютон.
Распределенная нагрузка задается силой, действующей на единицу объема (поверхности, длины).
Размерность распределенной нагрузки – Н/м 3 (Н/м 2 , Н/м).
Принятое обозначение:
 .
. .
. .
.Принятое обозначение:
 .
. Под действием пары сил тело будет совершать вращательное движение.
Проекция положительна, если направление отрезка совпадает с положительным направлением оси.
Равномерное и прямолинейное движение материальной точки является движением по инерции. Под состоянием равновесия материальной точки и твердого тела понимают не только состояние покоя, но и движение по инерции. Для твердого тела существуют различные виды движения по инерции, например равномерное вращение твердого тела вокруг неподвижной оси.
Эти две силы называются уравновешивающимися.
Вообще силы называются уравновешивающимися, если твердое тело, к которому приложены эти силы, находится в покое.
Следствие. Не нарушая состояния твердого тела, силу можно переносить по ее линии действия в любую точку тела.
Две системы сил называются эквивалентными, если одну из них можно заменить другой, не нарушая состояния твердого тела.
диагонали.
По модулю равнодействующая равна:

Следует иметь в виду, что действие — сила, приложенная к телу Б, и противодействие — сила, приложенная к телу А, не уравновешиваются, так как они приложены к разным телам.
Не следует при этом забывать, что условия равновесия, являющиеся необходимыми и достаточными для твердого тела, являются необходимыми, но недостаточными для соответствующего нетвердого тела.
- Связи и их реакции
- Гладкая поверхность ограничивает перемещение по нормали к поверхности опоры. Реакция направлена перпендикулярно поверхности.
- Шарнирная подвижная опора ограничивает перемещение тела по нормали к опорной плоскости. Реакция направлена по нормали к поверхности опоры.
- Шарнирная неподвижная опора противодействует любому перемещению в плоскости, перпендикулярной оси вращения.
- Шарнирный невесомый стержень противодействует перемещению тела вдоль линии стержня. Реакция будет направлена вдоль линии стержня.
- Глухая заделка противодействует любому перемещению и вращению в плоскости. Ее действие можно заменить силой, представленной в виде двух составляющих и парой сил с моментом.
- Момент силы относительно точки
- Абсолютное значение момента равно произведению модуля силы на кратчайшее расстояние h от центра вращения до линии действия силы. Расстояние h называют плечом силы.

- Момент считают положительным, если сила стремится вращать плечо h против хода часовой стрелки и отрицательным при вращении по ходу часовой стрелки.
- Свойства момента силы относительно точки:
1) Момент силы не изменится при переносе точки приложения силы вдоль линии действия силы.
2) Момент силы равен нулю, если линия действия силы проходит через точку приложения силы.
3) Момент равнодействующей силы относительно точки равен сумме моментов слагаемых сил относительно этой точки.,
где

 ,
, 
- Момент силы относительно оси
- Момент силы относительно оси — это момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Момент считается положительным, если с положительного конца оси поворот, который сила стремится совершить, виден происходящим против хода часовой стрелки, и отрицательным – если по ходу часовой стрелки. - Чтобы найти момент силы относительно оси, нужно:
1) Провести плоскость перпендикулярную оси z.
2) Спроецировать силуна эту плоскость и вычислить величину проекции .
3) Провести плечо h из точки пересечения оси с плоскостью на линию действия проекции силыи вычислить его длину.
4) Найти произведение этого плеча и проекции силы с соответствующим знаком. - Свойства момента силы относительно оси.
Момент силы относительно оси равен нулю, если:
1), то есть сила параллельна оси.
2) h=0, то есть линия действия силы пересекает ось.

 .
.  , то есть сила
, то есть сила - Момент пары сил
- Момент пары сил равен произведению одной силы на кратчайшее расстояние между линиями действия сил пары, которое называется плечом пары (пара сил оказывает на тело вращающее действие) ,
где:— силы, составляющие пару;
h — плечо пары.
Момент пары считают положительным, если силы стремятся вращать плечо против хода часовой стрелки. - Свойства пары сил.
1) Сумма проекций сил пары на любую ось равна нулю.
2) Не изменяя момента пары можно одновременно соответственно изменять значение сил и плечо пары.
3) Пару можно переносить в плоскости ее действия при этом действие пары на тело не изменится.
 ,
,  — силы, составляющие пару;
— силы, составляющие пару; - Преобразование сходящейся системы сил
- Равнодействующая двух сходящихся сил находится на основании аксиомы о параллелограмме сил.
Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил – способ векторного многоугольника.
Вывод: система сходящихся сил () приводится к одной равнодействующей силе . - Аналитически равнодействующая сила может быть определена через ее проекции на оси координат:
Согласно теореме: проекция равнодействующей на ось равна сумме проекций слагаемых сил на эту ось:, или в общем виде
С учетомравнодействующая определяется выражением: . - Направление вектора равнодействующей определяется косинусами углов между вектором и осями x, y, z:
 двух сходящихся сил находится на основании аксиомы о параллелограмме сил.
двух сходящихся сил находится на основании аксиомы о параллелограмме сил.  ) приводится к одной равнодействующей силе
) приводится к одной равнодействующей силе 
 , или в общем виде
, или в общем виде 
 .
.
- Преобразование произвольной системы сил
- Теорема: силу, приложенную к твердому телу, можно, не изменяя оказываемого ею действия, перенести параллельно в другую точку тела, прибавляя при этом пару сил с моментом, равным моменту переносимой силы относительно точки, в которую она переносится.
В результате указанного преобразования получается сходящаяся система сил и сумма моментов пар сил. Действие сходящейся системы сил заменяют действием суммарной силы, действие моментов — суммарным моментом.
Суммарный вектор— это главный вектор системы сил.
Суммарный момент— это главный момент системы сил.
Вывод: произвольная система сил в результате тождественного преобразования приводится к главному вектору и главному моменту системы сил. - Аналитически главный вектор и главный момент системы сил могут быть определены через их проекции на оси координат: ,
 — это главный момент системы сил.
— это главный момент системы сил.  ,
, 
- Условия равновесия систем сил
- Равновесие системы сходящихся сил
Действие системы сходящихся сил эквивалентно действию одной равнодействующей силы.
Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю.
Из формулыследует, что для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y,Z равнялась нулю: - Для равновесия плоской сходящейся системы сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y равнялась нулю:
 .
. 

- Равновесие произвольной системы сил.
- Действие произвольной системы сил эквивалентно действию главного вектора и главного момента. Для равновесия необходимо и достаточно выполнения условия: .
- Для равновесия произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси X,Y,Z и суммы моментов всех сил относительно осей X,Y,Z равнялись нулю:
- Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы сумма проекций главного вектора на оси X,Y, и алгебраическая сумма моментов сил относительно центра О были равны нулю:
 .
.

Кинематика
Кинематика — раздел теоретической механики, в котором рассматриваются общие геометрические свойства механического движения, как процесса, происходящего в пространстве и во времени. Движущиеся объекты рассматривают как геометрические точки или геометрические тела.
- Основные понятия кинематики
- Способы задания движения точки
- Задать движение точки — значит задать изменение ее положения по отношению к выбранной системе отсчета. Существуют три основные системы отсчета: векторная, координатная, естественная.
- В векторной системе положение точки относительно начала отсчета задается радиус-вектором.
Закон движения:. - В системе координат OXYZ положение точки задается тремя координатами X, Y, Z.
Закон движения: x = x(t), y = y(t); z = z(t). - В естественной системе отсчета положение точки задается расстоянием S от начала отсчета до этой точки вдоль траектории.
Закон движения:.
Движение точки, при естественном способе задания движения, определено если известны:
1) Траектория движения.
2) Начало и направление отсчета дуговой координаты.
3) Уравнение движения.
При естественном способе задания движения, в отличии от других способов, используются подвижные координатные оси, движущиеся вместе с точкой по траектории. Такими осями являются:
Касательная (τ) – направлена в сторону возрастания дуговой координаты по касательной к траектории.
Главная нормаль (n) – направлена в сторону вогнутости кривой.
Бинормаль (b) – направлена перпендикулярно к осям τ, n.
 .
. .
. - Определение кинематических характеристик точки
- Траектория точки
В векторной системе отсчета траектория описывается выражением:.
В координатной системе отсчета траектория определяется по закону движения точки и описывается выражениями z = f(x,y) — в пространстве, или y = f(x) – в плоскости.
В естественной системе отсчета траектория задается заранее. - Определение скорости точки в векторной системе координат
При задании движения точки в векторной системе координат отношение перемещения к интервалу времениназывают средним значением скорости на этом интервале времени: .
Принимая интервал времени бесконечно малой величиной, получают значение скорости в данный момент времени (мгновенное значение скорости):.
Вектор средней скоростинаправлен вдоль вектора в сторону движения точки, вектор мгновенной скорости направлен по касательной к траектории в сторону движения точки.
Вывод:скорость точки – векторная величина, равная производной от закона движения по времени.
Свойство производной:производная от какой либо величины по времени определяет скорость изменения этой величины. - Определение скорости точки в координатной системе отсчета
Скорости изменения координат точки:.
Модуль полной скорости точки при прямоугольной системе координат будет равен:.
Направление вектора скорости определяется косинусами направляющих углов:,
где— углы между вектором скорости и осями координат. - Определение скорости точки в естественной системе отсчета
Скорость точки в естественной системе отсчета определяется как производная от закона движения точки:.
Согласно предыдущим выводам вектор скорости направлен по касательной к траектории в сторону движения точки и в осяхопределяется только одной проекцией .
 называют средним значением скорости на этом интервале времени:
называют средним значением скорости на этом интервале времени:  .
.  .
.  направлен вдоль вектора
направлен вдоль вектора  в сторону движения точки, вектор мгновенной скорости
в сторону движения точки, вектор мгновенной скорости  направлен по касательной к траектории в сторону движения точки.
направлен по касательной к траектории в сторону движения точки.  .
.  .
.  ,
,  — углы между вектором скорости и осями координат.
— углы между вектором скорости и осями координат. .
.  определяется только одной проекцией
определяется только одной проекцией  .
.- Ускорение точки
- По определению ускорение характеризует изменение скорости, то есть скорость изменения скорости.
- Ускорения точки в векторной системе отсчета
На основании свойства производной:.
Вектор скорости может изменяться по модулю и направлению.
Вектор ускорения направлен по линии приращения вектора скорости, т. е. в сторону искривления траектории. - Ускорение точки в координатной системе отсчета
Ускорение изменения координат точки равно производной по времени от скоростей изменения этих координат:.
Полное ускорение в прямоугольной системе координат будет определяться выражением:.
Направляющие косинусы вектора ускорения:. - Ускорение точки в естественной системе отсчета Приращение вектора скорости можно разложить на составляющие, параллельные осям естественной системы координат: .
Разделив левую и правую части равенства на dt, получим:,
где— тангенциальное ускорение; — нормальное ускорение;
R — радиус кривизны траектории в окрестности точки.
 .
.  .
.  .
.  .
. можно разложить на составляющие, параллельные осям естественной системы координат:
можно разложить на составляющие, параллельные осям естественной системы координат:  .
.  ,
,  — тангенциальное ускорение;
— тангенциальное ускорение;  — нормальное ускорение;
— нормальное ускорение; - Кинематика твердого тела
- В кинематике твердых тел решаются две основные задачи:
1) задание движения и определение кинематических характеристик тела в целом;
2) определение кинематических характеристик точек тела. - Поступательное движение твердого тела
Поступательное движение — это движение, при котором прямая, проведенная через две точки тела, остается параллельной ее первоначальному положению.
Теорема:при поступательном движении все точки тела движутся по одинаковым траекториям и имеют в каждой момент времени одинаковые по модулю и направлению скорости и ускорения.
Вывод:поступательное движение твердого тела определяется движением любой его точки, в связи с чем, задание и изучение его движения сводится к кинематике точки. - Вращательное движение твердого тела вокруг неподвижной оси
Вращательное движение твердого тела вокруг неподвижной оси — это движение твердого тела, при котором две точки, принадлежащие телу, остаются неподвижными в течение всего времени движения.
Положение тела определяется углом поворота. Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
Закон вращательного движения тела вокруг неподвижной оси.
Угловую скорость и угловое ускорение тела определим методом дифференцирования:— угловая скорость, рад/с; — угловое ускорение, рад/с².
Если рассечь тело плоскостью перпендикулярной оси, выбрать на оси вращения точку С и произвольную точку М, то точка М будет описывать вокруг точки С окружность радиуса R. За время dt происходит элементарный поворот на угол, при этом точка М совершит перемещение вдоль траектории на расстояние .
Модуль линейной скорости:.
Ускорение точки М при известной траектории определяется по его составляющим: ,
где.
В итоге, получаем формулы
тангенциальное ускорение:;
нормальное ускорение:.
 . Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
. Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)  .
.  — угловая скорость, рад/с;
— угловая скорость, рад/с;  — угловое ускорение, рад/с².
— угловое ускорение, рад/с².  , при этом точка М совершит перемещение вдоль траектории на расстояние
, при этом точка М совершит перемещение вдоль траектории на расстояние  .
.  .
.  ,
,  .
.  ;
;  .
.- Плоско-параллельное движение твердого тела
- Плоско-параллельное движение твердого тела — это движение твердого тела, при котором все его точки перемещаются в плоскостях, параллельных одной неподвижной плоскости.
Движение сечения S в своей плоскости можно рассматривать как сложное, состоящее из двух элементарных движений:
1) поступательного и вращательного;
2) вращательного относительно подвижного (мгновенного) центра. - В первом варианте движение сечения может быть задано уравнениями движения одной его точки (полюса) и вращением сечения вокруг полюса.
В качестве полюса может быть принята любая точка сечения.
Уравнения движения запишутся в виде:.
Ускорение точки движущейся плоской фигуры складывается из ускорения полюса относительно неподвижной системы отсчета и ускорения за счет вращательного движения вокруг полюса. - Во втором варианте движение сечения рассматривается как вращательное вокруг подвижного (мгновенного) центра P.
В этом случае скорость любой точки В сечения будет определяться по формуле для вращательного движения:.
Угловая скорость вокруг мгновенного центра Р может быть определена если известна скорость какой либо точки сечения, например точки А.. - Положение мгновенного центра вращения может быть определено на основании следующих свойств:
1) вектор скорости точки перпендикулярен радиусу;
2) модуль скорости точки пропорционален расстоянию от точки до центра вращения ();
3) скорость в центре вращения равна нулю. - Теорема:проекции скоростей двух точек твердого тела на прямую, проведенную через эти точки, равны между собой и одинаково направлены.
Доказательство: расстояние АВ изменяться не может, следовательно,не может быть больше или меньше .
Вывод:.
 .
. 

 .
.  .
. );
);  не может быть больше или меньше
не может быть больше или меньше  .
.  .
.- Сложное движение точки
- Относительное движение — это движение точки относительно подвижной системы.
Переносное движение — это движение точки вместе с подвижной системой.
Абсолютное движение — это движение точки относительно неподвижной системы.
Соответственно называют скорости и ускорения:— относительные; — переносные; — абсолютные. - Абсолютная скорость точки равна векторной сумме относительной и переносной скоростей (согласно теореме о сложении скоростей): .
Абсолютное значение скорости определяется по теореме косинусов:. - Ускорение по правилу параллелограмма определяется только при поступательном переносном движении . .
- При непоступательном переносном движении появляется третья составляющая ускорения, называемое поворотным или кориолисовым. ,
где.
Кориолисово ускорение численно равно:,
где– угол между векторами и .
Направление вектора кориолисова ускорения удобно определять по правилу Н.Е. Жуковского: векторспроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения.
 — относительные;
— относительные;  — переносные;
— переносные;  — абсолютные.
— абсолютные. .
.  .
. .
.  .
. ,
,  .
.  ,
,  – угол между векторами
– угол между векторами  и
и  .
. Динамика
Динамика — это раздел теоретической механики, в котором изучаются механические движении материальных тел в зависимости от причин, их вызывающих.
- Основные понятия динамики

где mk, xk, yk, zk — масса и координаты k-той точки механической системы, m — масса системы.
В однородном поле тяжести положение центра масс совпадает с положением центра тяжести.
Момент инерции материальной точки относительно оси равен произведению массы точки на квадрат расстояния точки от оси:
 .
. Момент инерции системы (тела) относительно оси равен арифметической сумме моментов инерции всех точек:


 ,
, где
 — ускорение центра масс тела.
— ускорение центра масс тела. , равная произведению вектора силы
, равная произведению вектора силы  на бесконечно малый промежуток времени dt:
на бесконечно малый промежуток времени dt:  .
. Полный импульс силы за Δt равен интегралу от элементарных импульсов:
 .на бесконечно малое перемещение
.на бесконечно малое перемещение  .
. Скалярное произведение векторов равно произведению их модулей на косинус угла между направлениями векторов:
 ,
, где α — угол между направлениями векторов перемещения и силы.
на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению:  .
. Единица измерения работы — Джоуль (1 Дж = 1 Н·м).
 , равная произведению массы m на её скорость
, равная произведению массы m на её скорость  :
:  .
. или
или  ,
, где m — масса механической системы,
 — вектор скорости центра масс системы.
— вектор скорости центра масс системы. .
. .
.- Аксиомы динамики
- Первая аксиома — это закон инерции.
Если на свободную материальную точку не действуют никакие силы или действует уравновешенная система сил, то точка будет находиться в состоянии покоя или равномерного прямолинейного движения. - Вторая аксиома — закон пропорциональности ускорения.
Ускорение, сообщаемое материальной точке действующей на неё силой, пропорционально этой силе и по направлению совпадает с направлением силы:— это основной закон динамики. - Третья аксиома — это закон противодействия.
Силы, с которыми действуют друг на друга две материальные точки, равны по модулю и направлены вдоль прямой, соединяющей эти точки, в противоположные стороны:. - Четвертая аксиома — закон независимости действия сил.
При действии на материальную точку системы сил полное ускорение этой точки равно геометрической сумме ускорений от действия каждой силы:
 — это основной закон динамики.
— это основной закон динамики. .
.
- Дифференциальные уравнения динамики
- Дифференциальные уравнения движения точки связывают ускорение точки с действующими на нее силами. Фактически дифференциальные уравнения являются записью основного закона динамики в явной дифференциальной форме.
Для абсолютного движения точки (движение в инерциальной системе отсчета) дифференциальное уравнение имеет вид:. - Векторное уравнение может быть записано в проекциях на оси прямоугольной инерциальной системы координат:
- При известной траектория движения точки уравнение может быть записано в проекциях на оси естественной системы координат:
С учетом того, что,
где— тангенциальное ускорение; — нормальное ускорение,
уравнения примут вид:
 .
.

 ,
,  — тангенциальное ускорение;
— тангенциальное ускорение;  — нормальное ускорение,
— нормальное ускорение, 
- Общие теоремы динамики
- Общие теоремы динамики устанавливают зависимость между мерами механического движения и механического взаимодействия. Выводы теорем являются результатом тождественного преобразования основного закона динамики.
- Теорема об изменении количества движения: изменение количества движения материальной точки (механической системы) за конечный промежуток времени равно сумме импульсов внешних сил за тот же промежуток времени — для материальной точки; — для механической системы.
- Теорема об изменении кинетической энергии: изменение кинетической энергии точки (механической системы) при её перемещении равно сумме работ всех действующих внешних сил на этом перемещении — для материальной точки; — для механической системы.
- Кинетическая энергия механической системы определяется в соответствии с , при этом для твердых тел выведены следующие зависимости: — при поступательном движении тела; — при вращательном движении тела; — при плоско-параллельном движении тела.
- Момент инерции цилиндра относительно его оси: .
- Момент инерции стержня относительно оси z: .
- Момент инерции прямоугольной пластины относительно осей х и y: .
- Момент инерции шара определяется по формуле: .
- Работа силы тяжести: ,
где P — сила тяжести;
h — изменение положения тела по вертикали. - Работа силы при вращательном движении тела ,
где M — момент силы,
w — угловая скорость тела.
Следует иметь в виду, что работа, как скалярная величина, может быть положительной или отрицательной. Работа будет положительной если направление действия силы совпадает с направлением движения.
 — для материальной точки;
— для материальной точки;  — для механической системы.
— для механической системы. — для материальной точки;
— для материальной точки;  — для механической системы.
— для механической системы. — при поступательном движении тела;
— при поступательном движении тела;  — при вращательном движении тела;
— при вращательном движении тела;  — при плоско-параллельном движении тела.
— при плоско-параллельном движении тела. .
. .
. .
. .
. ,
, - Принцип Даламбера
- Формулировка принципа Даламбера: если в любой момент времени к действующим на точку силам присоединить силы инерции, то полученная система сил будет уравновешенной: .
- Для механической системы: .
 .
. .
.Примеры решения задач
Решение примеров по теме: «Статика твердого тела»
Пример 1. Условия равновесия
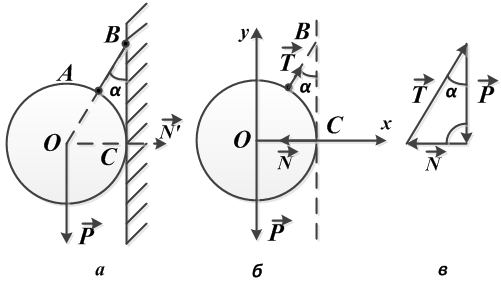
Висящий на нити, под углом в сорок пять градусов к гладкой стене шар весом в десять Ньютон, находится в состоянии равновесия (рис. а). Необходимо определить давление однородного шара на гладкую стенку и натяжение нити.
Дано: P = 10 Н; α = 45°
Найти: N, T — ?
Решение.
Отбрасываем связи, а их действие на шар заменяем реакциями.
Реакция стенки N направлена перпендикулярно стенке (от точки касания С к центру шара О), реакция нити Т — вдоль нити от точки А к точке В.
Тем самым выявляется полная система сил, приложенных к покоящемуся шару.
Это система сил, сходящихся в центре О шара, и состоящая из веса шара Р (активная сила), реакции стенки N и реакции нити Т (рис. б).
Реакции N и Т по величине неизвестны. Для их определения следует воспользоваться условиями равновесия (в той или иной форме — геометрической, аналитической).
При геометрическом способе решения строится замкнутый многоугольник сил и используются соотношения школьной геометрии (теорема синусов, теорема косинусов, теорема Пифагора и т.д.).
В данном случае это замкнутый силовой треугольник (рис. в), из которого получаем:

После подстановки в формулы числовых значений, получим:  .
.
Ответ:  .
.
Решение примеров по теме: «Кинематика»
Пример 2. Уравнение траектории точки
Дано:
Движение точки задано уравнениями  ;
;
(x, у — в сантиметрах, t — в секундах).
Найти: уравнение траектории точки в координатной форме.
Решение. Для определения уравнения траектории из уравнений движения исключаем время t. Для этого из первого уравнения выражаем  и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:
и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:  .
.
Опуская промежуточные выражения, получаем уравнение траектории:  .
.
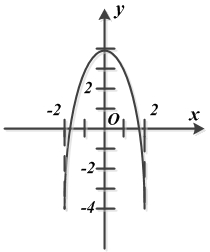 Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Ответ: .
Решение примеров по теме: «Динамика»
Пример 3. Основной закон динамики точки
Свободная материальная точка, масса которой десять килограмм, движется прямолинейно с ускорением пол метра в секунду в квадрате. Определить силу, приложенную к точке.
Дано: m = 10 кг; a = 0,5 м/с 2 .
Найти: F — ?
Решение.
Согласно основному закону динамики:  .
.
Подставив значения в формулу, получим: 
Ответ: сила, сообщающая массе, равной 10 кг,
ускорение 0,5 м/с 2 , равна 5 Н.
В помощь студенту
- Формулы, правила, законы, теоремы, уравнения, примеры решения задач
Список литературы:
Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах.
Буторин Л.В., Бусыгина Е.Б. Теоретическая механика. Учебно-практическое пособие.
Элементы векторной алгебры

Краткое содержание: Элементы векторной алгебры: понятие вектора, свойства векторов, правые и левые системы координат, скалярное и векторное произведение двух векторов.
Введение в теоретическую механику. Введение в статику. Основные понятия и определения статики: материальная точка и абсолютно твердое тело, механическая система, сила, система сил. Аксиомы и теоремы статики. Соединение тел между собой и направление сил реакции связей. Система сходящихся сил. Условия равновесия системы сходящихся сил.
Элементы векторной алгебры
В теоретической механике рассматриваются такие векторные величины как сила, моменты силы относительно точки и оси, момент пары сил, скорость, ускорение и другие.
1. Понятие вектора.
Для определенности рассматриваем прямоугольную декартову систему координат.
Вектор — это направленный отрезок, который характеризуется длиной и направлением.
Операции над векторами. Вектора можно складывать и умножать на число.
 сумма двух векторов есть вектор
сумма двух векторов есть вектор
 произведение вектора на действительное число есть вектор
произведение вектора на действительное число есть вектор
 существует нулевой вектор
существует нулевой вектор
В математике все вектора являются свободными, их можно переносить параллельно самим себе.
В сумме двух векторов начало второго вектора можно поместить в конец первого вектора, тогда сумму двух векторов можно представить как вектор, имеющий начало в начале первого вектора, а конец в конце второго вектора. Применяя это правило для суммы нескольких векторов получаем, что суммой нескольких векторов является вектор, замыкающий ломаную линию, состоящую из слагаемых векторов.
Операции над векторами подчиняются следующим законам:



2. Правые и левые системы координат.
Декартовы системы координат делятся на два вида: правую и левую.
Рассмотрим декартовы системы координат на плоскости.
При повороте оси Ox правой системы координат на 90о против часовой стрелки она совпадает с осью Oy.
Рассмотрим декартовы системы координат в пространстве.
При повороте оси Ox правой системы координат вокруг оси Oz на 90о против часовой стрелки она совпадает с осью Oy.
3. Длина, проекции и направляющие косинусы вектора.
В дальнейшем будем рассматривать правую декартову систему координат. Единичные вектора вдоль осей Ox, Oy и Oz образуют систему единичных (или базисных) векторов. Любой вектор, имеющий начало в точке O, можно представить как сумму  числа (ax, ay, az ) — это проекции вектора
числа (ax, ay, az ) — это проекции вектора  на оси координат (см. рис. 1-5).
на оси координат (см. рис. 1-5).
Длина (или модуль) вектора  определяется формулой
определяется формулой  и обозначается
и обозначается  или
или  .
.
Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами, опущенными из начала и конца вектора на эту ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси, и отрицательной (-), если проекция направлена в противоположную сторону
Направляющими косинусами cos(α), cos(β), cos(γ) вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.

Любая точка пространства с координатами (x, y, z) может быть задана своим радиус-вектором:

Координаты (x, y, z) это проекции вектора  на оси координат.
на оси координат.
4. Скалярное произведение двух векторов
Имеется два вектора  и
и  .
.  ,
,  .
.
Результатом скалярного произведения двух векторов  и
и  является скалярная величина (число).
является скалярная величина (число).
Записывается как  или
или  . Скалярное произведение двух векторов равно
. Скалярное произведение двух векторов равно 
Свойства скалярного произведения:




5. Векторное произведение двух векторов
Имеется два вектора  и
и  .
.  ,
,  .
.
Результатом векторного произведения двух векторов  и
и  является вектор
является вектор  . Записывается как
. Записывается как  или
или  .
.
Векторное произведение двух векторов это вектор  , перпендикулярный к обоим этим векторам, и направленный так, чтобы с его конца поворот вектора
, перпендикулярный к обоим этим векторам, и направленный так, чтобы с его конца поворот вектора  к вектору
к вектору  был виден против часовой стрелки.
был виден против часовой стрелки.
Длина (или модуль) векторного произведения равна  .
.
Свойства векторного произведения:

Векторное произведение двух векторов вычисляется через их проекции следующим образом:




Введение
Теоретическая механика – это наука, в которой изучаются механические движения вещественных форм материальных объектов.
Механическое движение – это перемещение материальных объектов в пространстве с течением времени без рассмотрения физических свойств этих объектов и их изменения в процессе движения.
Движение материальных объектов происходит в пространстве и во времени. Пространство является трехмерным пространством Эвклида. Теоретическая механика изучает только вещественные формы материальных объектов. Элементарные частицы и различные поля не являются предметом изучения в теоретической механике.
Теоретическая механика является базой для других разделов механики (теории упругости, сопротивления материалов, теории механизмов и машин и пр.) и многих технических дисциплин.
Теоретическая механика делится на три части: статику, кинематику и динамику.
СТАТИКА
Статика — это раздел теоретической механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил.
Под равновесием тела в статике понимается состояние его покоя по отношению к другим телам, принимаемым за неподвижные.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ СТАТИКИ
Материальным телом называется некоторое количество вещества, которое заполняет какой-нибудь объем в пространстве. Возможны случаи, когда тело в тех или иных направлениях имеет весьма малые размеры по сравнению с размерами в других направлениях.
Материальной точкой называется простейшая модель материального тела любой формы, размеры которого достаточно малы, и которое можно принять за геометрическую точку, имеющую определенную массу.
Механическим воздействием одного тела на другое называется такое воздействие, при котором пренебрегают изменениями в химической структуре тела и его физическом состоянии. Если тело испытывает механическое воздействие со стороны других материальных тел, то оно может изменять свое движение в пространстве или оставаться в покое. Механическое воздействие может происходить как при соприкосновении тел, так и на расстоянии (притяжение, отталкивание).
Механической системой называется любая совокупность материальных точек.
Абсолютно твердым телом (или неизменяемой механической системой) называется материальное тело, геометрическая форма которого и размеры не изменяются ни при каких механических воздействиях со стороны других тел, а расстояние между любыми двумя его точками остается постоянным.
Cила — это основная количественная мера механического воздействия одного тела на другое, которая характеризует его интенсивность и направление.
Природа силы может быть различной. Это могут быть гравитационные, электромагнитные, упругие силы или силы давления. Теоретическая механика не интересуется природой сил.
Сила определяется точкой приложения, числовым значением и направлением действия, т. е. является векторной величиной.
Модуль силы находят путем ее сравнения с силой, принятой за единицу. Для статического измерения силы служат приборы, называемые динамометрами.
Силу как величину векторную обозначают какой-либо буквой со знаком вектора (например,  или
или  ). Для выражения числового значения силы или ее модуля используется знак модуля от вектора или те же буквы, но без знака вектора (например,
). Для выражения числового значения силы или ее модуля используется знак модуля от вектора или те же буквы, но без знака вектора (например,  и
и  или
или  и
и  ).
).
Системой сил называется группа сил, которые действуют на рассматриваемое тело или (в общем случае) на точки механической системы.
Если линии действия всех сил лежат в одной плоскости, то система сил называется плоской, а если эти линии действия не лежат в одной плоскости, — то система сил называется пространственной.
Системой сил эквивалентной нулю (или уравновешенной системой сил) называется такая система сил, действие которой на твердое тело или материальную точку, находящиеся в покое или движущиеся по инерции, не приводит к изменению состояния покоя или движения по инерции этого тела или материальной точки.

Две системы сил называются эквивалентными, если их действие по отдельности на одно и то же твердое тело или материальную точку одинаково при прочих равных условиях.

Равнодействующей силой рассматриваемой системы сил называется сила, действие которой на твердое тело или материальную точку эквивалентно действию этой системы сил. Равнодействующую силу обозначают обычно 

Уравновешивающей силой рассматриваемой системы сил называется сила, добавление которой к заданной системе сил дает новую систему, эквивалентную нулю.
Уравновешивающая сила равна по модулю равнодействующей и противоположна ей по направлению.
Сила, приложенная к телу в одной его точке называется сосредоточенной. Силы, действующие на все точки данного объема, данной части поверхности тела или данной части кривой, называются распределенными.
Понятие о сосредоточенной силе является условным. Силы, которые в механике рассматриваются как сосредоточенные, представляют собой равнодействующие некоторых систем распределенных сил.
Аксиома о равновесии двух сил.
Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по величине и направлены вдоль одной прямой в противоположные стороны.
Если на твердое тело действует система сил, то к ней можно добавить (отбросить) уравновешенную систему сил. Полученная после добавления (отбрасывания) новая система сил эквивалентна первоначальной.
Аксиома параллелограмма сил.
Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и равную по величине и направлению диагонали параллелограмма, построенного на этих силах, как на сторонах.


Эта аксиома допускает и обратное утверждение:
Силу можно разложить бесчисленным множеством способов на две силы, приложенные в любой точке линии действия данной силы.
Аксиома о равенстве действия и противодействия.
При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие.
Если к данному телу приложена сила воздействия  от другого тела, то от данного тела к другому телу будет приложена сила
от другого тела, то от данного тела к другому телу будет приложена сила  , равная и прямо противоположная силе
, равная и прямо противоположная силе  . Силы приложены в одной геометрической точке, но к разным телам.
. Силы приложены в одной геометрической точке, но к разным телам.
Свободным твердым телом называется тело, имеющее возможность получать любое движение из данного положения, для чего необходимо приложить соответствующую силу.
При решении большинства задач механики приходится иметь дело с телами несвободными, т. е. лишенными возможности перемещаться в направлении действия приложенных к ним активных сил. Тела, ограничивающие движение рассматриваемого тела, называются связями. Сила, с которой связь действует на тело, препятствуя его перемещению в том или ином направлении называется силой реакции (противодействия) этой связи или просто реакцией связи.
Эффект от действия связей такой же, как от действия определенных, дополнительных сил (реакций связей), которые могут быть приложены к свободному телу вместо связей.
Аксиому о связях называют также принципом освобождаемости от связей. Согласно этой аксиоме, не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией связи.
Силы, которые могут сообщать свободному телу движение, называются активными силами.
Приложив к телу, кроме активных сил, реакции связей, можно рассматривать тело как свободное. Активные силы и силы реакции называются внешними силами.
Пусть, например, на гладкой неподвижной горизонтальной плоскости покоится шар. Плоскость, ограничивающая движение шара, является для него связью. Если мысленно освободить шар от связи, то для удержания его в покое к нему в точке касания с плоскостью нужно приложить силу  , равную по модулю весу шара
, равную по модулю весу шара  и противоположную ему по направлению. Сила
и противоположную ему по направлению. Сила  и есть реакция плоскости (реакция связи). Шар, освобожденный от связи, будет свободным телом, на которое действует задаваемая (активная) сила
и есть реакция плоскости (реакция связи). Шар, освобожденный от связи, будет свободным телом, на которое действует задаваемая (активная) сила  и реакция плоскости
и реакция плоскости  .
.
Равновесие механической системы не нарушается от наложения новых связей; в частности, равновесие механической системы не нарушится, если все части системы связать между собой неизменно, жестко.
СОЕДИНЕНИЕ ТЕЛ МЕЖДУ СОБОЙ. ВИДЫ СВЯЗЕЙ. РЕАКЦИИ СВЯЗЕЙ.
Отдельное тело может быть связано с другими телами разными способами.
Опирание на поверхность
Если соприкасаются абсолютно гладкие тела, то силы взаимодействия между ними направлены по общей нормали к их поверхностям в точке соприкосновения.
Связь с помощью нитей (нить, цепь, трос)
Связь, осуществляемая в виде гибкой нерастяжимой и невесомой нити, не дает удаляться телу от точки подвеса нити вдоль нити. Поэтому реакция натянутой нити также направлена вдоль нити, к точке ее подвеса.

Освободим гирю от связи разрезав (мысленно) нить в любом месте и добавив силу реакции связи, которую направим вдоль нити вверх (обозначим ее  ). Гиря становится свободным твердым телом на которое действуют две силы и при этом оно находится в покое. Согласно аксиоме о равновесии двух сил, силы
). Гиря становится свободным твердым телом на которое действуют две силы и при этом оно находится в покое. Согласно аксиоме о равновесии двух сил, силы  и
и  равны по величине и противоположны по направлению.
равны по величине и противоположны по направлению.
Вырежем (мысленно) кусочек нити в любом месте и добавим в местах разреза силы реакции связи (обозначим их  и
и  ). Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы
). Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы  и
и  равны по величине и действуют вдоль одной прямой в противоположные стороны. Реакция связи натянутой нити направлена вдоль нити
равны по величине и действуют вдоль одной прямой в противоположные стороны. Реакция связи натянутой нити направлена вдоль нити
Соединение тел с помощью шарниров.
Шарниром называется устройство, связывающее тела и позволяющее совершать вращение одного тела относительно другого.
Цилиндрический шарнир допускает вращение тел вокруг одной оси (и скольжение вдоль нее).
Шарнирно-неподвижная опора препятствует любому поступательному движению, но дает возможность свободно вращаться вокруг оси шарнира. Условные обозначения:
Реакция  шарнирно-неподвижной опоры проходит через центр шарнира О и лежит в плоскости перпендикулярной к оси шарнира, но ее модуль и направление неизвестны.
шарнирно-неподвижной опоры проходит через центр шарнира О и лежит в плоскости перпендикулярной к оси шарнира, но ее модуль и направление неизвестны.
Шарнирно-подвижная опора ( шарнирно-неподвижная опора поставленная на катки) не препятствует перемещению параллельно опорной поверхности. Если не учитывать трения катков, то линия действия реакции такой опоры проходит через центр шарнира перпендикулярно опорной поверхности. Неизвестен только модуль этой реакции.
Шаровой шарнир. Шаровым шарниром называется устройство, позволяющее сочлененным телам, имеющим общую точку сочленения, совершать вращение в пространстве относительно друг друга вокруг общей точки. Шаровой шарнир состоит из сферической чаши, находящейся на одном теле, и сферического выступа того же диаметра на другом. Реакция в шаровом шарнире может иметь любое направление в пространстве.
В случае заделки одного тела в другое реакция связи состоит из силы  и пары сил с моментом
и пары сил с моментом  . Величина и направление реакции определяется из общих уравнений равновесия твердого тела.
. Величина и направление реакции определяется из общих уравнений равновесия твердого тела.
Пример. На невесомую трехшарнирную арку действует горизонтальная сила  . Определить линию действия реакции
. Определить линию действия реакции  (реакции связи в точке А).
(реакции связи в точке А).
Решение: Рассмотрим правую часть арки отдельно. В точках В и С приложим силы реакции связей  и
и  . Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы
. Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы  и
и  равны по величине и действуют вдоль одной прямой в противоположные стороны. Таким образом направление силы
равны по величине и действуют вдоль одной прямой в противоположные стороны. Таким образом направление силы  нам известно (вдоль линии ВС).
нам известно (вдоль линии ВС).

Рассмотрим левую часть арки отдельно. В точках А и С приложим силы реакции связей  и
и  . Сила
. Сила  , действие равно противодействию. На тело действуют три силы, направления двух сил (
, действие равно противодействию. На тело действуют три силы, направления двух сил (  и
и  .) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила
.) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила  направлена вдоль линии AD.
направлена вдоль линии AD.
Пример. Однородный стержень закреплен шарнирно в точке А и опирается на гладкий цилиндр. Определить линию действия реакции  (реакции связи в точке А).
(реакции связи в точке А).

Решение: Так как стержень однородный, то равнодействующая сил тяжести (сила  ), действующих на стержень, приложена в его геометрическом центре (точка С). Так как стержень опирается на гладкую поверхность, то реакция связи (сила
), действующих на стержень, приложена в его геометрическом центре (точка С). Так как стержень опирается на гладкую поверхность, то реакция связи (сила  ) в точке касания (точка D) направлена по нормали к этой поверхности. На тело действуют три силы, направления двух сил (
) в точке касания (точка D) направлена по нормали к этой поверхности. На тело действуют три силы, направления двух сил ( и
и .) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила
.) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила  направлена вдоль линии AЕ.
направлена вдоль линии AЕ.
ТЕОРЕМЫ СТАТИКИ
Теорема о переносе силы вдоль линии действия.
Действие силы на твердое тело не изменится от переноса силы вдоль своей линии действия.
 ;
;  ;
;

Теорема о трех силах.
Если твердое тело под действием трех сил, две из которых пересекаются в одной точке, находится в равновесии, то линии действия таких трех сил пресекаются в одной точке.


следовательно силы пересекаются в одной точке.
СИСТЕМА СХОДЯЩИХСЯ СИЛ
Системой сходящихся сил (или пучком сил) называется такая система сил, линии действия которой пересекаются в одной точке – центре пучка.
Равнодействующая системы сходящихся сил равна векторной сумме слагаемых сил и определяется замыкающей стороной силового многоугольника, построенного на слагаемых силах как на составляющих. Точка приложения равнодействующей силы совпадает с точкой пересечения линий действия сил.

Проекции равнодействующей силы на оси координат равны алгебраической сумме проекций составляющих сил на эти оси.
 ;
; ;
; .
.
Условия равновесия системы сходящихся сил в векторной форме
Для равновесия сходящейся системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая сила была равна нулю.

Условия равновесия системы сходящихся сил в алгебраической форме
Для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех прямоугольных осей координат были равны нулю.