При аэродинамических расчетах и изучении динамики движения самолетов используются различные системы координат. Чаще всего используются связанная, скоростная, нормальная и траекторная системы координат.
Связанная система координат 0XYZ жестко связана с самолетом (отсюда ее название). Начало этой системы совпадает с центром масс самолета (см. рис. 18). Ось 0X лежит в базовой плоскости самолета, она направлена в сторону носовой части и, как правило, параллельна САХ. Эта ось называется продольной осью. Ось 0Y тоже лежит в базовой плоскости самолета, при этом она перпендикулярна оси 0X и направлена к верхней части самолета. Она называется нормальной осью. Ось 0Z перпендикулярна базовой плоскости самолета и направлена в сторону правого полукрыла. Эта ось называется поперечной осью.
Рис. 18. Связанная система координат
Скоростная система координат 0XaYaZa связана с вектором скорости движения центра масс самолета относительно воздушной среды  (см. рис. 19), ее начало также помещают в центре масс самолета. Ось 0Xa в скоростной системе координат всегда совпадает с вектором скорости и называется скоростной осью. Ось 0Ya перпендикулярна вектору скорости, лежит в базовой плоскости самолета и направлена к верхней части самолета. Она называется осью подъемной силы. Ось 0Za проводят так, чтобы она дополняла оси 0Xa и 0Ya до правой системы координат. Эта ось называется боковой осью.
(см. рис. 19), ее начало также помещают в центре масс самолета. Ось 0Xa в скоростной системе координат всегда совпадает с вектором скорости и называется скоростной осью. Ось 0Ya перпендикулярна вектору скорости, лежит в базовой плоскости самолета и направлена к верхней части самолета. Она называется осью подъемной силы. Ось 0Za проводят так, чтобы она дополняла оси 0Xa и 0Ya до правой системы координат. Эта ось называется боковой осью.
Рис. 19. Скоростная система координат
Для описания взаимного положения осей связанной и скоростной систем координат используются угол атаки и угол скольжения. Углом атаки a называется угол между осью 0X связанной системы координат и проекцией вектора скорости на базовую плоскость самолета –  . Углом скольжения b называется угол между вектором скорости и базовой плоскостью самолета. Легко заметить, что если скольжение отсутствует (b = 0), то определение угла атаки упрощается: угол a будет равен углу между продольной осью 0X и вектором скорости .
. Углом скольжения b называется угол между вектором скорости и базовой плоскостью самолета. Легко заметить, что если скольжение отсутствует (b = 0), то определение угла атаки упрощается: угол a будет равен углу между продольной осью 0X и вектором скорости .
Нормальная система координат 0XgYgZg используется для описания пространственного положения самолета относительно поверхности Земли. Начало координат этой системы совпадает с началом связанной системы координат (см. рис. 20). Ось 0Yg всегда направлена вверх по местной вертикали, а направление осей 0Xg и 0Zg выбирается в соответствии с решаемой задачей, при этом плоскость Xg0Zg всегда расположена горизонтально. Угол между осью 0Xg и проекцией оси 0X на горизонтальную плоскость XXg0Zg называется углом рыскания и обозначается y. Угол между продольной осью 0X и горизонтальной плоскостью Xg0Zg называется углом тангажа и обозначается j. Угол между поперечной осью 0Z и горизонтальной плоскостью Xg0Zg называется углом крена и обозначается g.
Рис. 20. Нормальная система координат
Траекторная система координат 0XкYкZк используется главным образом в динамике полета для описания движения самолета относительно поверхности Земли. В общем случае скорость полета относительно воздушной среды может не совпадать со скоростью полета относительно Земли, т.к. в реальной атмосфере почти всегда имеется движение воздушных масс, проще говоря, ветер. Ветер оказывает воздействие на самолет, и суммарная скорость его движения относительно поверхности Земли  (земная скорость) будет равна:
(земная скорость) будет равна:
 , (31)
, (31)
где – скорость самолета относительно воздушной среды;
 – скорость ветра относительно Земли.
– скорость ветра относительно Земли.
Траекторная система координат связана с вектором земной скорости . Начало координат этой системы совпадает с началом связанной системы координат (см. рис. 21). Ось 0Xк совпадает с направлением вектора земной скорости . Ось 0Yк размещается в вертикальной плоскости, проходящей через ось 0Xк, и направлена вверх от Земли. Ось 0Zк образует правую систему координат. Траекторная система координат может быть получена из нормальной путем поворота последней на угол пути x и угол наклона траектории q.
Рис. 21. Траекторная система координат
Углом пути x называется угол между проекцией вектора на горизонтальную плоскость Xg0Zg и осью 0Xg. Угол наклона траектории q – это угол между вектором земной скорости и местной горизонтальной плоскостью Xg0Zg.
- Основные навигационные понятия и определения
- Курсовая работа: Расчёт закона управления продольным движением самолета
- 1.1 Общие сведения
- 1.2 Уравнения продольного движения самолета
- 1.3 Силы и моменты при продольном движении
- 1.4 Линеаризованные уравнения движения
- 1.5 Математическая модель привода стабилизатора
- 1.6 Математические модели датчиков угловой скорости и перегрузки
- 1.7 Математическая модель датчика положения штурвала
- 2.1 Общие положения
- 2.2 Требования к статическим характеристикам
- 2.3 Требования к динамическим характеристикам
- 2.4 Требования к разбросам параметров
- 2.5 Дополнительные требования
- 3.1 Этап анализа
- 3.2 Этап синтеза
Основные навигационные понятия и определения
«Воздушная навигация» — наука о вождении воздушных судов по программной траектории.
Полет является сложным движением самолета в воздухе. Его можно разложить на поступательное движение центра масс и угловое движение вокруг центра масс. При описании положения самолета в процессе его поступательного движения используется ряд точек и линий. Они служат основой для ведения навигационных понятий, непосредственно связанных с движением центра масс самолета. К ним относятся: пространственное место самолета (ПМС), место самолета (МС), траектория полета (ТП), линия пути (ЛП).
Пространственное место самолета — точка пространства, в которой в данный момент находится центр масс самолета.
Место самолета – точка на земной поверхности, в которую в данный момент проектируется центр масс самолета. Пространственное место самолета и место самолета могут быть заданными и фактическими.
Траектория полета — пространственная линия, описываемая центром масс самолета при движении. Она может быть заданной, требуемой и фактической. Под пространственно — временной траекторией полета понимают траекторию полета, заданную не только в пространстве, но и во времени. Заданная пространственно- временная траектория называется программной.
Линия пути — это проекция траектории полета самолета на поверхность Земли. Проекция программной траектории полета на поверхность Земли называется линией заданного пути (ЛЗП). Линия, по которой должен пролететь самолет, называется маршрутом полета.
Профилем полета – называется проекция программной траектории на вертикальную плоскость, проведенную через развернутый маршрут полета в прямую линию. Проекция на земную поверхность фактической траектории полета самолета называется линией фактического пути (ЛФП). Вдоль маршрутов устанавливаются ВТ и МВП, представляющие собой ограниченные по высоте и ширине коридоры в воздушном пространстве.
ВТ — коридор в воздушном пространстве, ограниченный по высоте и ширине, предназначенный для выполнения полетов воздушными судами всех ведомств, обеспеченный трассовыми аэродромами и оборудованный средствами радионавигации, контроля и управления воздушным движением.
МВП — коридор в воздушном пространстве, ограниченный по высоте и ширине и предназначенный для выполнения полетов воздушными судами при осуществлении местных воздушных сообщений.
При решении ряда навигационных задач могут применяться несколько координатных систем. В общем случае их выбор и применение зависят от характера технических средств навигации и возможностей вычислительных устройств. Положение МПС и МС в любой системе определяется координатами, которые определяются линейными или угловыми величинами. В навигации к наиболее употребительным геоцентрическим системам относятся: географическая (астрономическая и геодезическая), нормальная сферическая, ортодромическая и экваториальная.
В качестве основных географических систем используются: прямоугольные правые системы координат (нормальная земная и стартовая), биполярные (плоская и сферическая), гиперболическая и горизонтальная.
При проектировании физической поверхности Земли на поверхность геоида используется астрономическая система координат. Координатами место самолета в этой системе являются:
· астрономическая широта jа — угол между плоскостью экватора и направлением отверстий линий в данной точке, измеряющийся в плоскости экватора к полюсам от 0 о до ±90 о ;
· астрономическая долгота lа — двугранный угол, заключенный между плоскостью Гринвичского меридиана и плоскостью, проходящей через отвесную линию в данной точке параллельно оси вращения Земли (плоскостью астрономического меридиана) измеряющийся от 0 о до ± 180 о к востоку и западу.
Координатами в геодезической системе (рис. 1.2) являются: 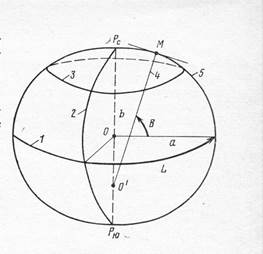
· геодезическая широта В – угол между плоскостью экватора 1 и нормальную 4 к референц — эллипсоиду в данной точке М (измеряется от плоскости экватора к полюсам от 0 о до ±90 о );
· геодезическая долгота L – двугранный угол между плоскостями Гринвичского и геодезического 5 меридианов данной точки М (измеряется от 0 о до ±180 о к востоку и западу, в некоторых случаях от 0 о до 360 о к востоку).
Географическая система координат:
· географическая широта jг — двугранный угол, заключенный между плоскостью экватора и нормалью (отвесной линией) к поверхности эллипсоида (геоида) в данной точке М (измеряется от экватора к полюсам от 0 о до ±90 о );
· географическая долгота lг – двугранный угол, заключенный между плоскостями начального (гринвичского) меридиана и меридиана данной точки М. Измеряется от 0 о до ±180 о к востоку и западу (при решении некоторых задач от 0 о до 360 о к востоку).
Нормальная система координат:
· нормальная сферическая широта j — угол между плоскостью экватора и направлением из центра земного шара в точку, являющуюся изображением соответствующей точки эллипсоида. Измеряется центральным углом или дугой меридиана в тех же пределах. Что и географическая широта;
· нормальная сферическая долгота l — двугранный угол между плоскостью начального (гринвичского меридиана) и плоскостью меридиана данной точки. Измеряется либо центральным углом в плоскости экватора либо дугой экватора от начального меридиана до меридиана данной точки в тех же пределах, что и географическая долгота.
Физическое состояние воздушной среды, а также направление ее перемещения относительно земной поверхности оказывают существенное влияние на траекторию движения самолета в любой системе координат. Для оценки движения самолета по траектории используются геометрические и механические величины, характеризующие пространственное положение самолета, скорость и направление его движения в некоторый момент времени. Их принято называть навигационными элементами полета и подразделять на навигационные элементы и движения.
Высота полета — это расстояние по вертикали от некоторого уровня, принятого от начала отсчета, до самолета.
Элементами второй группы являются: путевая скорость, путевой угол, угол сноса, воздушная скорость, курс и вертикальная скорость.
Скорость полета самолета определяют как относительно воздушной среды, окружающий самолет, так и относительно земной поверхности.
Курсом самолета γ – называется угол в горизонтальной плоскости 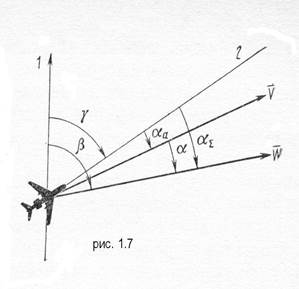 между направлением, принятым за начало отсчета 1 в точке местоположения самолета, и проекцией на эту плоскость его продольной оси 2 (рис. 1.7).
между направлением, принятым за начало отсчета 1 в точке местоположения самолета, и проекцией на эту плоскость его продольной оси 2 (рис. 1.7).
Путевой скоростью полета называется скорость перемещения по земной поверхности МС, направленная по касательной к линии пути 2.
Путевым углом называется угол между направлением, принятым за начало отсчета и линией пути (вектором путевой скорости W). Он также как и курс отчитывается от начала отсчета по часовой стрелке от 0 о до 360 о .
Угол сноса a — самолета называется угол между вектором воздушной скорости и вектором путевой скорости в горизонтальной плоскости. Он считается положительным, если вектор путевой скорости расположен правее вектора воздушной скорости, отрицательным – если левее.
Вертикальной скоростью Wв называется вертикальная составляющая вектора полной скорости поступательного перемещения самолета относительно Земли W (рис. 1.7) .
Рассмотренные выше навигационные элементы полета могут быть заданными, фактическими и требуемыми. Например, линии фактического пути — фактический путевой угол, линии заданного пути — заданный путевой угол, а линии требуемого пути — требуемый путевой угол.
Постановка навигационной задачи основывается на определении программных, фактических и требуемых значений навигационно- пилотажных параметров относительно воздушной среды и земной поверхности, характеризующих соответствующие траектории полета.
Полету любого назначения предшествует расчет программной траектории и составление (разработка) заданной навигационной программы полета, рассчитанная программная траектория, обеспечивающая наиболее безопасный и экономический полет, может быть задана аналитически или графически в различных системах координат. Аналитически она выражается конечными уравнениями движения центра масс самолета, которые в широко распространенной ортодромической прямоугольной системе координат имеют вид:
 (1.9)
(1.9)
где Zз, Sз, Hз – заданные (программные) ортодромические прямоугольные координаты ПМС в заданный момент времени Т.
Для указания программной траектории полета экипажу задаются маршрут полета, время полета его опорных пунктов, а также профиль полета. Навигационная программа, разработанная на основе программной траектории, в зависимости от возможностей технических средств навигации и пилотирования может вводиться в запоминающие устройства навигационных вычислителей и представляться на индикаторах навигационной обстановки, автоматических картографических планшетах, полетных картах, бортовых журналах и планах полета. Полет по программной траектории согласно навигационной программе должен выполняться в соответствии с руководством по летной эксплуатации. В них регламентируются правила, условия и ограничения по летной эксплуатации и пилотированию самолета данного типа.
Характер траектории определяется режимами полета самолета. Последние в свою очередь, характеризуются различными навигационными и пилотажными параметрами, под которыми понимают механические и геометрические величины и их производные, применяемые в самолетовождении.
Навигационные и пилотажные параметры могут совпадать с навигационными элементами полета или быть связаны с ними простыми соотношениями. К навигационным параметрам относятся: координаты пространственного места самолета, путевая скорость, путевой угол, угол сноса, вертикальная скорость, производные этих параметров и другие.
К пилотажным относятся: воздушная скорость, курс самолета, вертикальная скорость относительно воздушной среды, угловая скорость, углы рыскания, крена, тангажа и др. Согласно такому делению параметров, используемых в СВЖ, различают навигационный и пилотажный режимы полетов.
Контрольные вопросы
1. Что такое предмет воздушная навигация?
2. Какой бывает траектория полета?
3. Какие геодезические системы координат наиболее употребительны в навигации?
4. Чем определяется характер траектории полета?
Ключевые слова:
Предмет воздушная навигация, ПМС, МС, ТП, ЛП, профиль полета, ВТ, МВЛ, астрономическая система координат, геодезическая система координат
географическая система координат, нормальная система координат, высота полета, курс самолета, путевая скорость, путевой угол, угол сноса.
Курсовая работа: Расчёт закона управления продольным движением самолета
| Название: Расчёт закона управления продольным движением самолета Раздел: Рефераты по транспорту Тип: курсовая работа Добавлен 16:15:05 05 декабря 2010 Похожие работы Просмотров: 129 Комментариев: 23 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать |
 ,
, ,
, – равнодействующая всех сил;
– равнодействующая всех сил; – главный момент внешних сил самолёта, вектор суммарного вращающего момента;
– главный момент внешних сил самолёта, вектор суммарного вращающего момента; – вектор угловой скорости системы координат;
– вектор угловой скорости системы координат; – момент количества движения самолёта;
– момент количества движения самолёта; » обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.
» обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.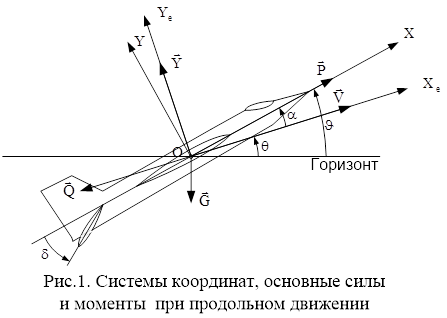
 – угол атаки,
– угол атаки,  – угол тангажа,
– угол тангажа,  – угол наклона траектории,
– угол наклона траектории,  – вектор воздушной скорости,
– вектор воздушной скорости,  – подъемная сила,
– подъемная сила,  – сила тяги двигателей,
– сила тяги двигателей,  – сила лобового сопротивления,
– сила лобового сопротивления,  – сила тяжести,
– сила тяжести,  – угол отклонения рулей высоты,
– угол отклонения рулей высоты,  – момент тангажа, вращающий самолёт вокруг оси ОZ.
– момент тангажа, вращающий самолёт вокруг оси ОZ. , (1)
, (1) – суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота
– суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота  .
. . (2)
. (2) ; (3)
; (3) . (4)
. (4) , (5)
, (5) , (6)
, (6) – (7)
– (7) . (8)
. (8) ; (9)
; (9) . (10)
. (10) есть функция скорости V и высоты H полёта, угла атаки
есть функция скорости V и высоты H полёта, угла атаки  , угловой скорости изменения угла тангажа (скорости вращения
, угловой скорости изменения угла тангажа (скорости вращения  самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты
самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты  :
: . (11)
. (11) – задаваемые табличным путём функции,
– задаваемые табличным путём функции, – плотность атмосферы,
– плотность атмосферы, (12)
(12) (13)
(13) ;
;  (14)
(14) и
и  являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым
являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым  в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки:
в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки: (15)
(15) (16)
(16) (17)
(17) и пренебрегая величиной
и пренебрегая величиной  , с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим:
, с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим: . (18)
. (18) м/с 2 .
м/с 2 . , получим формулу для приращения ускорения самолёта по оси подъёмной силы:
, получим формулу для приращения ускорения самолёта по оси подъёмной силы: . (19)
. (19) . (20)
. (20) выражением (15), получим следующие уравнения состояния:
выражением (15), получим следующие уравнения состояния: , (21)
, (21) , (22)
, (22) , (23)
, (23) – скорость звука на данной высоте.
– скорость звука на данной высоте.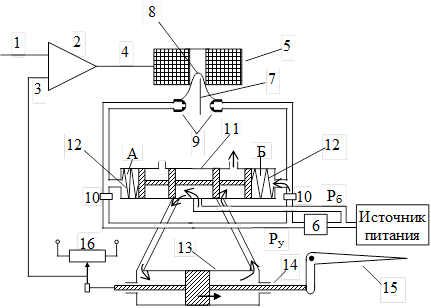
 , (24)
, (24) .
. ,
,  ,
,  ,
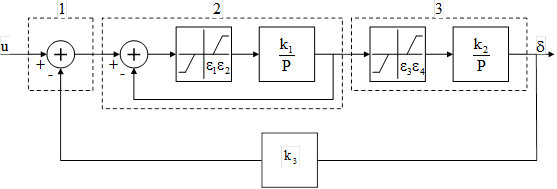
, 


 угол наклона нелинейных характеристик равен 45 0.
угол наклона нелинейных характеристик равен 45 0.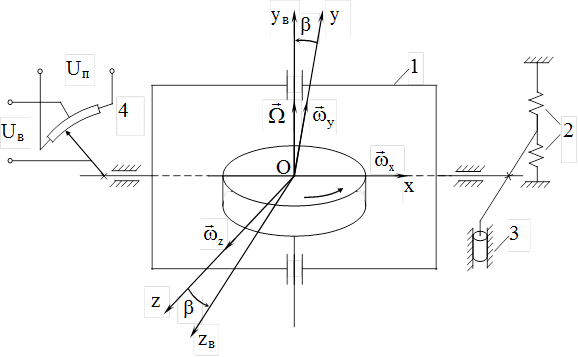 Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик.
Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик. с большой угловой скоростью
с большой угловой скоростью  . в этом случае ротор гироскопа обладает большим кинетическим моментом
. в этом случае ротор гироскопа обладает большим кинетическим моментом  , где
, где  – момент инерции ротора гироскопа относительно оси
– момент инерции ротора гироскопа относительно оси  . Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид:
. Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид: *) , (25)
*) , (25) , (26)
, (26) , (27)
, (27) – жесткость пружины, f – коэффициент демпфирования, получим
– жесткость пружины, f – коэффициент демпфирования, получим . (28)
. (28) малой, пренебрегая величиной
малой, пренебрегая величиной  по сравнению с
по сравнению с  , поскольку величина скорости вращения гироскопа велика, и введя обозначения
, поскольку величина скорости вращения гироскопа велика, и введя обозначения ,
,  ,
,  , (29)
, (29) . (30)
. (30) , то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
, то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа: . (31)
. (31) ,
,  с,
с,  .
.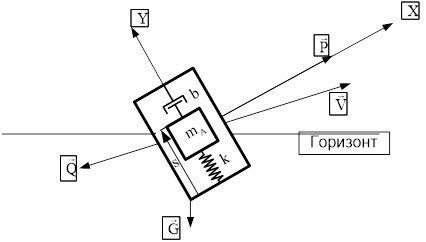
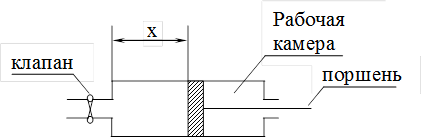
 , имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
, имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора. этого ускорения, то сумма сил, действующих на массу
этого ускорения, то сумма сил, действующих на массу  , (32)
, (32) .*) (33)
.*) (33) — жёсткость пружины,
— жёсткость пружины,  — коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра
— коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра  фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом: . (34)
. (34) с,
с,  ,
,  В/ед.
В/ед.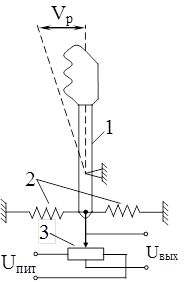
 в пределах ±20%.
в пределах ±20%.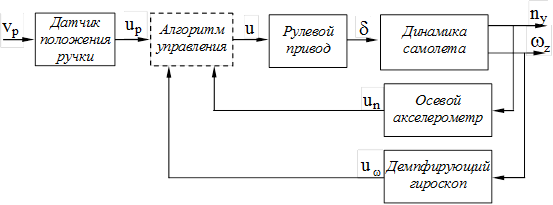
 , а также до сигналов перегрузки
, а также до сигналов перегрузки  , и угловой скорости тангажа
, и угловой скорости тангажа  . Определить полюсы и нули всех передаточных функций.
. Определить полюсы и нули всех передаточных функций. в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.
в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.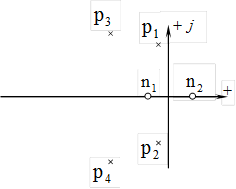
 можно воспользоваться разложением
можно воспользоваться разложением  на элементарные дроби:
на элементарные дроби: . (35)
. (35) (часто это условие выполняется, когда
(часто это условие выполняется, когда  ). Тогда можно приближенно записать:
). Тогда можно приближенно записать: . (36)
. (36) .
. является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений.
является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений. и
и  (обозначается
(обозначается  ) называется вектор
) называется вектор  , длина которого равна произведению absinj (j — угол между векторами
, длина которого равна произведению absinj (j — угол между векторами  ,
,