Теорема
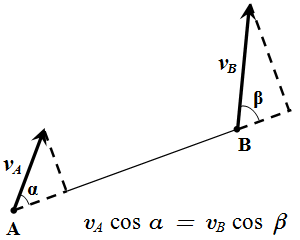
Проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу.
vA cos α = vB cos β .
Доказательство
Выберем прямоугольную неподвижную систему координат Oxyz . Возьмем две произвольные точки твердого тела A и B . Пусть ( xA, yA, zA ) и ( xB, yB, zB ) – координаты этих точек. При движении твердого тела они являются функциями от времени t . Дифференцируя по времени, получаем проекции скоростей точек.
, .
Воспользуемся тем, что при движении твердого тела, расстояние | AB | между точками остается постоянным, то есть не зависит от времени t . Также постоянным является квадрат расстояния
.
Продифференцируем это уравнение по времени t , применяя правило дифференцирования сложной функции.
Сократим на 2 .
(1)
Введем вектор
.
Тогда уравнение (1) можно представить в виде скалярного произведения векторов.
(2)
Выполняем преобразования.
;
(3) .
По свойству скалярного произведения
,
.
Подставляем в (3) и сокращаем на | AB | .
;
Что и требовалось доказать.
Относительная скорость
Рассмотрим движение точки B относительно точки A . Введем относительную скорость точки B относительно A .
Тогда уравнение (2) можно переписать в виде
.
То есть относительная скорость перпендикулярна вектору , проведенному из точки A в точку B . Поскольку точка B взята произвольным образом, то относительная скорость любой точки твердого тела перпендикулярна радиус вектору, проведенному из точки A . То есть относительно точки A тело совершает вращательное движение. Относительная скорость точек тела определяется по формуле для вращательного движения
.
Точку A , относительно которой рассматривают движение, часто называют полюсом.
Абсолютную скорость точки B относительно неподвижной системы координат можно записать в следующем виде:
.
Она равна сумме скорости поступательного движения произвольной точки A (полюса) и скорости вращательного движения относительно полюса A .
Пример решения задачи
Колеса 1 и 2 с радиусами R 1 = 0,15 м и R 2 = 0,3 м , соответственно, соединены шарнирами со стержнем 3 длины | AB | = 0,5 м . Колесо 1 вращается с угловой скоростью ω 1 = 1 рад/с . Для изображенного на рисунке положения механизма, определить угловую скорость ω 2 колеса 2. Принять L = 0,3 м .
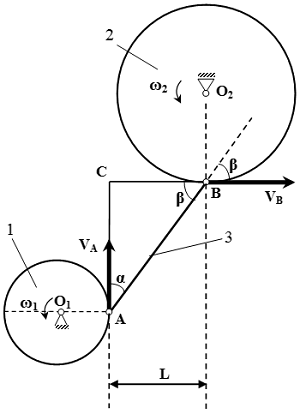
Рисунок к решению задачи
Точка A движется по окружности радиуса R 1 вокруг центра вращения O 1 . Скорость точки A определяется по формуле
VA = ω 1 R 1 .
Вектор направлен вертикально (перпендикулярно O 1 A ).
Точка B движется по окружности радиуса R 2 вокруг центра вращения O 2 . Скорость точки B определяется по формуле
VB = ω 2 R 2 .
Отсюда
.
Вектор направлен горизонтально (перпендикулярно O 2 B ).
Строим прямоугольный треугольник ABC . Применяем теорему Пифагора.
(м)
Косинус угла между вектором скорости и прямой AB , в направлении вектора , равен
.
Косинус угла между вектором скорости и прямой AB , в направлении вектора , равен
.
По теореме о проекциях скоростей двух точек твердого тела на прямую имеем:
VA cos α = VB cos β .
Отсюда
.
Находим угловую скорость колеса 2.
рад/с .
Автор: Олег Одинцов . Опубликовано: 07-10-2015
iSopromat.ru

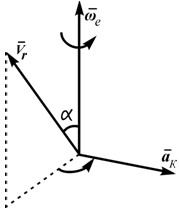
Рассмотрим определение величины и направления скоростей и ускорений точек при сложном движении. Кориолисово ускорение, правило векторного произведения и правило Жуковского.
Теоремы о скоростях и ускорениях точек в сложном движении подробно изложены в учебниках по теоретической механике.
Абсолютная скорость точки при сложном движении определяется как геометрическая сумма переносной и относительной скоростей:
Каждое слагаемое в этой формуле определяется независимо друг от друга, исходя из соответствующего закона движения. В примере на рисунке 3.2 относительная скорость Vr определяется с учетом закона движения точки по оси Oy.
Переносная скорость определится как скорость точки M при вращении вместе с квадратом вокруг оси его вращения. Величина абсолютной скорости может быть определена с помощью теоремы косинусов:

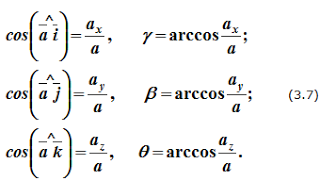
Для определения вектора абсолютной скорости можно равенство (3.1) спроецировать на выбранные оси координат, найти проекции абсолютной скорости, её величину и направляющие косинусы, то есть определить углы, которые вектор скорости составляет с выбранными осями.
Ускорение точки при сложном движении определяется как сума трех ускорений: переносного, относительного и кориолисова (поворотного):

Первые два слагаемые этой формулы определяются из соответствующих законов переносного и относительного движений. В случае неравномерных криволинейных движений эта формула имеет вид


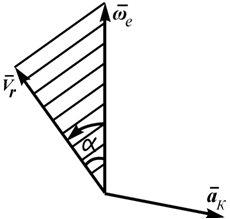
Величина этого ускорения
где α — угол между векторами переносной угловой и линейной относительной скоростями.
Направление кориолисова ускорения определяется двумя правилами:
1. Правило векторного произведения при сложном движении
Согласно этому правилу вектор кориолисова ускорения перпендикулярен векторам ωe и Vr (или плоскости, проходящей через эти вектора, проведенные из одной точки). Направлен вектор aK так, что если смотреть ему навстречу, то кратчайший поворот вектора ωe до совмещения с вектором Vr происходит против хода часовой стрелки (рисунок 3.3).
2. Правило Жуковского при сложном движении
Для определения направления кориолисова ускорения при сложном движении нужно спроецировать вектор относительной скорости в плоскость, перпендикулярную вектору переносной угловой скорости и полученную проекцию повернуть на в сторону переносного вращения (рисунок 3.4).
Из формулы (3.5) видно, что кориолисово ускорение равно нулю, если
- равна нулю относительная скорость;
- переносное движение — поступательное ( ωe=0);
- угол между ωe и Vr равен 0 o или 180 o (вектор Vr параллелен оси переносного вращения).
Абсолютное ускорение точки при сложном движении определяется по аналогии с определением её скорости. Формула (3.3) проецируется на выбранные оси координат, и находятся проекции абсолютного ускорения на эти оси: ax, ay, az. Величина ускорения определяется по формуле:

Направление вектора абсолютного ускорения определяется с помощью направляющих косинусов, то есть определяются углы, которые вектор ускорения составляет с осями координат:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Определение скоростей точек плоской фигуры
Напомним, что движение плоской фигуры можно рассматривать как слагающееся из поступательного движения вместе с полюсом и вращательного движения вокруг полюса.
В соответствии с этим скорость произвольной точки М плоской фигуры геометрически складывается из скорости какой-нибудь точки А, принятой за полюс, и скорости, которую точка М получает при вращении фигуры вокруг этого полюса, т. е.

При этом скорость VMA определяется как скорость точки М при вращении тела вокруг неподвижной оси, проходящей через точку А перпендикулярно плоскости движения (см. § 7.2), т. е.

Таким образом, если известны скорость полюса VА и угловая скорость тела со, то

скорость любой точки М тела определяется в соответствии с равенством (8.2), диагональю параллелсгграмма, построенного на векторах VA и VMA, как на сторонах (рис. 8.3), а модуль скорости VM вычисляется по формуле

где у — угол между векторами VA и VMA
Задача 8.1. Колесо катится по неподвижной поверхности без скольжения (рис. 8.4, а). Найти скорость точек К и D колеса, если известны скорость Vc центра С колеса, радиус R колеса, расстояние КС = b и угол а.
Решение. 1. Рассматриваемое движение колеса является плоскопараллельным. Приняв точку С за полюс (так как ее скорость известна), в соответствии с общим равенством (8.2), для точки К можем записать

Однако нет возможности определить значение VKC, так как неизвестна угловая скорость со.
Для определения со рассмотрим скорость другой точки, а именно точки Р касания колеса о неподвижную поверхность (рис. 8.4, б). Для этой точки можно написать равенство

Особенностью точки Р является то обстоятельство, что в данный момент времени Vp— 0, так как колесо катится без скольжения. Тогда равенство (б) принимает вид



Отсюда следует: 1) векторы скоростей VPC и Vc должны быть направлены в противоположные стороны; 2) из равенства модулей VPC — Vc получаем ыРС= Vc, отсюда найдем со = Vc/PC= Vc/R. В соответствии с направлением вектора VPC определяем направление дуговой стрелки со и показываем ее на чертеже (рис. 8.4, б).
Теперь возвращаемся к определению VK по равенству (а). Находим
Vкс = о КС — V^b/R. Зная направление угловой скорости со, изображаем вектор VKC перпендикулярно отрезку КС и выполняем построение параллелограмма на векторах Vc и VKC (рис. 8.4, в). Так как в данном случае Vc и VKC взаимно перпендикулярны, окончательно находим

2. Скорость точки D на ободе колеса определим из равенства VD = VC + VDC. Так как численно VDC— соR — Vc, то параллелограмм, построенный на векторах Vc и VDC, будет ромбом. Угол между Vc и VDC равен 2а. Определив VD как длину соответствующей диагонали ромба, получим 
Теорема о проекциях скоростей двух точек твердого тела
Согласно равенству (8.2) для двух_ произвольных точек А и В твердого тела справедливо равенство VB =VA +VBA, в соответствии с которым выполним построение, показанное на рис. 8.5. Проецируя это равенство на ось Az, направленную по А В, получим Ум + VBAz. Учитывая, что вектор VBA перпендикулярен прямой


Этот результат и выражает теорему: проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу.

Отметим, что равенство (8.5) математически отражает то обстоятельство, что тело рассматривается как абсолютно твердое и расстояние между точками А и В не изменяется. Поэтому равенство (8.5) выполняется не только при плоскопараллельном, но и при любом движении твердого тела.
Задача 8.2. Ползуны А и В, соединенные стержнем с шарнирами на концах, перемешаются по взаимно перпендикулярным направляющим в плоскости чертежа (рис. 8.6, а). Определить при данном угле а скорость точки В, если известна скорость VA.
Решение. Проведем ось х через точки А и В. Зная направление VA,
находим проекцию этого вектора на прямую АВ: VAx — VA cos а (на рис. 8.6, б это будет отрезок Аа). Далее на чертеже от точки В откладываем ВЬ — Аа (так как отрезок Аа расположен на оси х вправо от точки А, то и отрезок ВЬ откладываем от точки В по оси х вправо). Восставляя в точке Ь перпендикуляр к прямой АВ, находим точку конца вектора VB.
Согласно теореме о проекциях VA cos а = K^cosp. Отсюда (учтя, что Р = 90° — а) окончательно получим VB = VA cos a/cos(90° — a) или VB = = VA ctg a.
Определение скоростей точек с помощью мгновенного центра скоростей
Для определения скоростей точек плоской фигуры выберем в качестве полюса какую-либо точку Р. Тогда, согласно формуле
(8.2), скорость произвольной точки М определяется как сумма двух векторов:

Если бы скорость полюса Р в данный момент времени была равна нулю, то правая часть этого равенства была бы представлена одним слагаемым УМР и скорость любой точки определялась бы как скорость точки М тела при вращении его вокруг неподвижного полюса Р.

Следовательно, если выбрать в качестве полюса точку Р, скорость которой в данный момент времени равна нулю, то модули скоростей всех точек фигуры будут пропорциональны их расстояниям до полюса Р, а направления векторов скоростей всех точек будут перпендикулярны прямым, соединяющим рассматриваемую точку и полюс Р. Естественно, что расчет по формулам (8.6) значительно проще расчета по общей формуле (8.2).
Точка плоской фигуры, скорость которой в данный момент времени равна нулю, называется мгновенным центром скоростей (МЦС). Легко убедиться, что если фигура движется непоступательно, то такая точка в каждый момент времени существует и при том единственная. Отметим, что мгновенный центр скоростей может быть расположен как на самой фигуре, так и на ее мысленном продолжении.
Рассмотрим способы определения положения мгновенного центра скоростей.
1. Пусть в момент времени t jum плоской фигуры известны ее угловая скорость со и скорость VA какой-нибудь ее точки А (рис. 8.7, а). Тогда, выбирая точку А в качестве полюса,_скорость_иско- мой нами точки Р можно определить по формуле Vp = VA + VpA—
Задача состоит в том^чтобы найти такую точку Р, у которой VP =0, значит, для нее VA +УРЛ =0 и отсюда УРА = -УА. Следовательно, для точки Р скорость УРА, которую точка Р получает при вращении фигуры вокруг полюса А, и скорость УА полюса А равны по модулю (УРА= УА) или озАР= УА и противоположны по направлению. Кроме того, точка Р должна лежать на перпендикуляре к вектору УА. Определение положения точки Р осуществляется таким построением: из точки А (рис. 8.7, б) восставим перпендикуляр к вектору УА и отложим на нем расстояние АР = УА/со в ту сторону от точки А, куда «покажет» вектор УА, если его повернуть на 90° в направлении дуговой стрелки со.
Мгновенный центр скоростей является единственной точкой плоской фигуры, скорость которой в данный момент времени равна нулю.


В другой момент времени мгновенным центром скоростей может быть уже другая точка плоской фигуры.
2. Пусть известны направления скоростей VA и Ув (рис. 8.8, а) двух точек А и В плоской фигуры (причем векторы скоростей этих точек непараллельны), или известны элементарные перемещения этих точек. Мгновенный центр скоростей будет находиться в точке пересечения перпендикуляров, восставленных из точек А и В к скоростям этих точек (или к элементарным перемещениям точек). Такое построение выполнено на рис. 8.8, б. Оно основано на том, что для любых точек А и В фигуры применимы положения (8.6):

Из этих равенств следует, что

Зная положение МЦС и угловую скорость тела, применив формулы (8.6), легко определить скорость любой точки этого тела. На- пример^для точки К (см. рис. 8.8, б) модуль скорость VK=coКР, вектор Ук направлен перпендикулярно прямой КР в соответствии с
направлением дуговой стрелки ю.
Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как будто эта фигура вращается вокруг мгновенного центра скоростей.
3. Если скорости точек А и В плоской фигуры параллельны друг другу, то возможны три варианта, которые изображены на рис. 8.9. Для случаев, когда прямая АВ перпендикулярна векторам VА и VB (рис. 8.9, а, б), построения основываются на пропорции (8.7).

Если скорости точек Ли В параллельны, а прямая AB_nt перпендикулярна VА (рис. 8.9, в), то перпендикуляры к УА и VB параллельны и мгновенный центр скоростей находится в бесконечности (АР= оо); угловая скорость вращения фигуры со = VJAP = VA/cc = 0. В этом случае скорости всех точек фигуры в данный момент времени равны друг другу, т. е. фигура имеет распределение скоростей как при поступательном движении. Такое состояние движения тела называют мгновенно поступательным. Отметим, что в этом состоянии ускорения всех точек тела не будут одинаковыми.
4. Если плоское движение тела осуществляется путем его качения без скольжения по неподвижной поверхности (рис. 8.10), то точка касания Р будет являться мгновенным центром скоростей (см. задачу 8.1).
Задача 8.3. Плоский механизм состоит из стержней 7, 2, 3, 4 и ползуна В (рис. 8.11), соединенных друг с другом и с неподвижными опорами 0< и 02 шарнирами; точка D находится в середине стержня АВ. Длины стержней: /2 =0,4 м, /2 = 1,2 м, /3 = 0,7 м, /4 = 0,3 м. Угловая скорость стержня 7 в заданном положении механизма со, = 2 с -1 и направлена против хода часовой стрелки. Определить VA, VB, VD, VE, oo2, co3, to4 и скорость точки К в середине стержня DE (DK = КЕ).
Решение. В рассматриваемом механизме стержни 7, 4 совершают вращательное движение, ползун В — поступательное, а стержни 2, 3 —

Скорость точки А определим как принадлежащую стержню 7, совершающему вращательное движение:

Рассмотрим движение стержня 2. Скорость точки А определена, а направление скорости точки В обусловлено тем, что она принадлежит одновременно стержню 2 и пол-

зуну, движущемуся вдоль направляющих. Теперь, восставляя из точек А и В перпендикуляры к УА и направлению движения ползуна В, находим положение точки С2 — МЦС стержня 2.
По направлению вектора УА, учитывая, что в рассматриваемом положении механизма стержень 2 вращается вокруг точки С2, определяем направление угловой скорости со2 стержня 2 и находим ее числовое значение (о2 = Va/AC2 = 0,8/1,04 = 0,77 с -1 , где АС2 — АВ sin 60° = 1,04 м (получим при рассмотрении ААС
Теперь определяем числовые значения и направления скоростей точек В и D стержня 2 (так как ABDC2 равносторонний, то ВС2 — DC2 — — 0,6 м):

Рассмотрим движение стержня 3. Скорость точки D известна. Так как точка Е принадлежит одновременно и стержню 4, вращающемуся вокруг оси 04, то Уе104Е. Тогда, проводя через точки D и Е прямые, перпендикулярные скоростям VD wVE, находим положение точки С3 — МЦС стержня
3. По направлению вектора VD, глядя из неподвижной точки С3, определяем направление угловой скорости со3, а ее числовое значение находим (предварительно определив из AZ)C3? отрезок Z)C3 = DEsin 30° = 0,35 м): со3 = Vd/C3D= 1,32 с -1 .
Для определения скорости точки К проведем прямую КС3 и, учитывая, что АР КС3 равносторонний (КС3 = 0,35 м), вычислим Ук = Далее, вычислив С3Е — 0,606 м, определяем УЕ — о3С3Е — 0,8 м/с, VeAC3E.
Рассмотрим движение стержня_4, вращающегося вокруг оси 04. Зная направление и числовое значение VE, находим направление и значение угловой скорости со4: со4 = Ve/04E — 2,67 с .
Ответ: VA = 0,8 м/с, VB = VD = 0,462 м/с, VE= 0,8 м/с, со2 = 0,77 с» 1 , со3 = 1,32 с -1 , (о4 = 2,67 с -1 , направления этих величин показаны на рис. 8.11.
Примечание. В механизме, состоящем из нескольких тел, каждое непоступательно движущееся тело имеет в данный момент времени свой мгновенный центр скоростей и свою угловую скорость.
Задача 8.4. Плоский механизм состоит из стержней 1, 2, 3 и катка, катящегося без скольжения по неподвижной плоскости (рис. 8.12, а). Соединения стержней между собой и стержня 3 к катку в точке D — шарнирные. Длины стержней: 1 <— 0,4 м, /2 = 0,6 м, /3 = 0,8 м. При данных углах а = 60°, В = 30° известны значения и направления угловой скорости со, = = 2 с и скорости центра О катка V0 = 0,346 м/с, ZABD = 90°. Определить скорость точки В и угловую скорость со2.
Решение. Механизм имеет две степени свободы (его положение определяется двумя углами а и р, не зависящими друг от друга) и скорость точки В (общей точки стержней 2 и 3) зависит от скоростей точек А и D.
Рассматривая движение стержня /, н аходим направление и значение скорости точки A: VA = coj/j = 0,8 м/с, VaAjO<A.
Рассмотрим движение катка. Его мгновенный центр скоростей расположен в точке Р; тогда VD найдем из пропорции

Так как ADOP равнобедренный и острые углы в нем равны 30°, то DP— 2 OP cos 30° = ОРл/3. Из равенства (а) находим VD — 0,6 м/с. Вектор VD направлен перпендикулярно DP.
Так как точка В принадлежит одновременно стержням АВ и BD, то по теореме о проекциях скоростей должно быть: 1) проекция вектора Ув на прямую А В равна проекции на эту прямую вектора УА (отрезок Аа на рис. 8.12, а), т. е. УА cos а = 0,4 м/с; 2) проекция вектора Ув на прямую DB равна проекции на эту прямую вектора У0 (отрезок Dd на рис. 8.12, а), т. е. У0 cos у = 0,3 м/с (у = 60°).
Далее решаем графически. Откладываем от точки В в соответствующих направлениях отрезки ВЬ <= Аа и Bb2 = Dd. Скорость точки В равна сумме векторов VB = Bb+ Bbj. Восставляем из точки Ь< перпендикуляр к ВЬХ, а из

точки b2 — перпендикуляр к ВЬ2. Точка пересечения этих перпендикуляров определяет конец искомого вектора VB.
Так как направления отрезков ВЬ и ВЬ2 взаимно перпендикулярны, то

Определяем со2. На рис. 8.12, б показан так называемый план скоростей, который графически изображает векторное равенство

где векторы VA и VB определены (см. рис. 8.12, а), а направление VBA перпендикулярно стержню АВ. Из чертежа (рис. 8.12, б) находим

Теперь определяем со2 = Vba/AB— 1,66 с -1 (направление со2 — против хода часовой стрелки).