- Условие
- Решение
- Решение задач по математике онлайн
- Калькулятор онлайн. Длина вектора. Модуль вектора.
- Немного теории.
- Скалярные и векторные величины
- Определение вектора
- Проекция вектора на ось
- Проекции вектора на оси координат
- Направляющие косинусы вектора
- Линейные операции над векторами и их основные свойства
- Сложение двух векторов
- Произведение вектора на число
- Основные свойства линейных операций
- Теоремы о проекциях векторов
- Разложение вектора по базису
- Координаты вектора в декартовой системе координат (ДСК)
- Координатные векторы
- Разложение вектора
- Равные и противоположные векторы
- Координаты радиус-вектора точки
Условие

3. Найти единичный вектор, перпендикулярный векторам vector = 2vector+vector+vector и vector = (1;1;2).
Решение

Скалярное произведение векторов, заданных своими координатами равно сумме произведений одноименных координат
Значит
vector=(1/sqrt(11); -3/sqrt(11);1/sqrt(11))
О т в е т. vector=(1/sqrt(11); -3/sqrt(11);1/sqrt(11))
Решение задач по математике онлайн
//mailru,yandex,google,vkontakte,odnoklassniki,instagram,wargaming,facebook,twitter,liveid,steam,soundcloud,lastfm, // echo( ‘
Калькулятор онлайн.
Длина вектора. Модуль вектора.
Этот калькулятор онлайн вычисляет длину (модуль) вектора. Вектор может быть задан в 2-х и 3-х мерном пространстве.
Онлайн калькулятор для вычисления длины (модуля) вектора не просто даёт ответ задачи, он приводит подробное решение с пояснениями, т.е. отображает процесс решения для того чтобы проконтролировать знания по математике и/или алгебре.
Этот калькулятор онлайн может быть полезен учащимся старших классов общеобразовательных школ при подготовке к контрольным работам и экзаменам, при проверке знаний перед ЕГЭ, родителям для контроля решения многих задач по математике и алгебре. А может быть вам слишком накладно нанимать репетитора или покупать новые учебники? Или вы просто хотите как можно быстрее сделать домашнее задание по математике или алгебре? В этом случае вы также можете воспользоваться нашими программами с подробным решением.
Таким образом вы можете проводить своё собственное обучение и/или обучение своих младших братьев или сестёр, при этом уровень образования в области решаемых задач повышается.
Если вы не знакомы с правилами ввода чисел, рекомендуем с ними ознакомиться.
Числа можно вводить целые или дробные.
Причём, дробные числа можно вводить не только в виде десятичной, но и в виде обыкновенной дроби.
Правила ввода десятичных дробей.
В десятичных дробях дробная часть от целой может отделяться как точкой так и запятой.
Например, можно вводить десятичные дроби так: 2.5 или так 1,3
Правила ввода обыкновенных дробей.
В качестве числителя, знаменателя и целой части дроби может выступать только целое число.
Знаменатель не может быть отрицательным.
При вводе числовой дроби числитель отделяется от знаменателя знаком деления: /
Ввод: -2/3
Результат: ( -frac )
Целая часть отделяется от дроби знаком амперсанд: &
Ввод: -1&5/7
Результат: ( -1frac )
Вычислить длину (модуль) вектора
Немного теории.
Скалярные и векторные величины
Многие физические величины полностью определяются заданием некоторого числа. Это, например, объем, масса, плотность, температура тела и др. Такие величины называются скалярными. В связи с этим числа иногда называют скалярами. Но есть и такие величины, которые определяются заданием не только числа, но и некоторого направления. Например, при движении тела следует указать не только скорость, с которой движется тело, но и направление движения. Точно так же, изучая действие какой-либо силы, необходимо указать не только значение этой силы, но и направление ее действия. Такие величины называются векторными. Для их описания было введено понятие вектора, оказавшееся полезным для математики.
Определение вектора
Любая упорядоченная пара точек А к В пространства определяет направленный отрезок, т.е. отрезок вместе с заданным на нем направлением. Если точка А первая, то ее называют началом направленного отрезка, а точку В — его концом. Направлением отрезка считают направление от начала к концу.
Определение
Направленный отрезок называется вектором.
Будем обозначать вектор символом ( overrightarrow ), причем первая буква означает начало вектора, а вторая — его конец.
Вектор, у которого начало и конец совпадают, называется нулевым и обозначается ( vec ) или просто 0.
Расстояние между началом и концом вектора называется его длиной и обозначается ( |overrightarrow| ) или ( |vec| ).
Нулевой вектор будем считать направленным одинаково с любым вектором; длина его равна нулю, т.е. ( |vec| = 0 ).
Теперь можно сформулировать важное понятие равенства двух векторов.
Определение
Векторы ( vec ) и ( vec ) называются равными (( vec = vec )), если они коллинеарны, одинаково направлены и их длины равны.

Проекция вектора на ось
Пусть в пространстве заданы ось ( u ) и некоторый вектор ( overrightarrow ). Проведем через точки А и В плоскости, перпендикулярные оси ( u ). Обозначим через А’ и В’ точки пересечения этих плоскостей с осью (см. рисунок 2).
Проекцией вектора ( overrightarrow ) на ось ( u ) называется величина А’В’ направленного отрезка А’В’ на оси ( u ). Напомним, что
( A’B’ = |overrightarrow| ) , если направление ( overrightarrow ) совпадает c направлением оси ( u ),
( A’B’ = -|overrightarrow| ) , если направление ( overrightarrow ) противоположно направлению оси ( u ),
Обозначается проекция вектора ( overrightarrow ) на ось ( u ) так: ( Пр_u overrightarrow ).
Теорема
Проекция вектора ( overrightarrow ) на ось ( u ) равна длине вектора ( overrightarrow ) , умноженной на косинус угла между вектором ( overrightarrow ) и осью ( u ) , т.е. ( Пр_u overrightarrow = |overrightarrow|cos varphi ) где ( varphi ) — угол между вектором ( overrightarrow ) и осью ( u ).
Замечание
Пусть ( overrightarrow=overrightarrow ) и задана какая-то ось ( u ). Применяя к каждому из этих векторов формулу теоремы, получаем
( Пр_u overrightarrow = Пр_u overrightarrow )
т.е. равные векторы имеют равные проекции на одну и ту же ось.
Проекции вектора на оси координат
Пусть в пространстве заданы прямоугольная система координат Oxyz и произвольный вектор ( overrightarrow ). Пусть, далее, ( X = Пр_u overrightarrow, ;; Y = Пр_u overrightarrow, ;; Z = Пр_u overrightarrow ). Проекции X, Y, Z вектора ( overrightarrow ) на оси координат называют его координатами. При этом пишут
( overrightarrow = (X;Y;Z) )
Теорема
Каковы бы ни были две точки A(x1; y1; z1) и B(x2; y2; z2), координаты вектора ( overrightarrow ) определяются следующими формулами:
Замечание
Если вектор ( overrightarrow ) выходит из начала координат, т.е. x2 = x, y2 = y, z2 = z, то координаты X, Y, Z вектора ( overrightarrow ) равны координатам его конца:
X = x, Y = y, Z = z.
Направляющие косинусы вектора
Возводя в квадрат левую и правую части каждого из предыдущих равенств и суммируя полученные результаты, имеем
( cos^2 alpha + cos^2 beta + cos^2 gamma = 1 )
т.е. сумма квадратов направляющих косинусов любого вектора равна единице.
Линейные операции над векторами и их основные свойства
Сложение двух векторов
Замечание
Определив сумму двух векторов, можно найти сумму любого числа данных векторов. Пусть, например, даны три вектора ( vec,;; vec, ;; vec ). Сложив ( vec ) и ( vec ), получим вектор ( vec + vec ). Прибавив теперь к нему вектор ( vec ), получим вектор ( vec + vec + vec )

Произведение вектора на число
Основные свойства линейных операций
1. Переместительное свойство сложения
( vec + vec = vec + vec )
3. Сочетательное свойство умножения
( lambda (mu vec) = (lambda mu) vec )
4. Распределительное свойство относительно суммы чисел
( (lambda +mu) vec = lambda vec + mu vec )
5. Распределительное свойство относительно суммы векторов
( lambda ( vec+vec) = lambda vec + lambda vec )
Замечание
Эти свойства линейных операций имеют фундаментальное значение, так как дают возможность производить над векторами обычные алгебраические действия. Например, в силу свойств 4 и 5 можно выполнять умножение скалярного многочлена на векторный многочлен «почленно».
Теоремы о проекциях векторов
Теорема
Проекция суммы двух векторов на ось равна сумме их проекций на эту ось, т.е.
( Пр_u (vec + vec) = Пр_u vec + Пр_u vec )
Теорему можно обобщить на случай любого числа слагаемых.
Разложение вектора по базису
Пусть векторы ( vec, ; vec, ; vec ) — единичные векторы осей координат, т.e. ( |vec| = |vec| = |vec| = 1 ), и каждый из них одинаково направлен с соответствующей осью координат (см. рисунок). Тройка векторов ( vec, ; vec, ; vec ) называется базисом.
Имеет место следующая теорема.
Теорема
Любой вектор ( vec ) может быть единственным образом разложен по базису ( vec, ; vec, ; vec; ), т.е. представлен в виде
( vec = lambda vec + mu vec + nu vec )
где ( lambda, ;; mu, ;; nu ) — некоторые числа.

Координаты вектора в декартовой системе координат (ДСК)
Для начала дадим определение координат вектора в заданной системе координат. Чтобы ввести данное понятие, определим что мы называем прямоугольной или декартовой системой координат.
Прямоугольная система координат представляет из себя прямолинейную систему координат с взаимно перпендикулярными осями на плоскости или в пространстве.
С помощью введения прямоугольной системы координат на плоскости или в трехмерном пространстве становится возможным описывание геометрических фигур вместе с их свойствами при помощи уравнений и неравенств, то есть использовать алгебраические методы при решении геометрических задач.
Тем самым, мы можем привязать к заданной системе координат векторы. Это значительно расширит наши возможности при решении определенных задач
Прямоугольная система координат на плоскости обычно обозначается O x y , где O x и O y – оси коорднат. Ось O x называют осью абсцисс, а ось O y – осью ординат (в пространстве появляется ещё одна ось O z , которая перпендикулярна и O x и O y ).
Итак, нам дана прямоугольная декартова система координат O x y на плоскости если мы отложим от начала координат векторы i → и j → , направление которых соответственно совпадет с положительными направлениями осей O x и O y , и их длина будет равна условной единице, мы получим координатные векторы. То есть в данном случае i → и j → являются координатными векторами.
Координатные векторы
Векторы i → и j → называются координатными векторами для заданной системы координат.
Откладываем от начала координат произвольный вектор a → . Опираясь на геометрическое определение операций над векторами, вектор a → может быть представлен в виде a → = a x · i → + a y · j → , где коэффициенты a x и a y — единственные в своем роде, их единственность достаточно просто доказать методом от противного.
Разложение вектора
Разложением вектора a → по координатным векторам i → и j → на плоскости называется представление вида a → = a x · i → + a y · j → .
Коэффициенты a x и a y называются координатами вектора в данной системе координат на плоскости.
Координаты вектора в данной системе координат принято записывать в круглых скобках, через запятую, при этом заданные координаты следует отделять от обозначения вектора знаком равенства. К примеру, запись a → = ( 2 ; — 3 ) означает, что вектор a → имеет координаты ( 2 ; — 3 ) в данной системе координат и может быть представлен в виде разложения по координатным векторам i → и j → как a → = 2 · i → — 3 · j → .
Следует обратить внимание, что порядок записи координат, имеет важное значение, если вы запишите координаты вектора в другом порядке, вы получите совершенно другой вектор.
Опираясь на определения координат вектора и их разложения становится очевидным, что единичные векторы i → и j → имеют координаты ( 1 ; 0 ) и ( 0 ; 1 ) соответственно, и они могут быть представлены в виде следующих разложений i → = 1 · i → + 0 · j → ; j → = 0 · i → + 1 · j → .
Также имеет место быть нулевой вектор 0 → с координатами ( 0 ; 0 ) и разложением 0 → = 0 · i → + 0 · j → .
Равные и противоположные векторы
Векторы a → и b → равны тогда, когда их соответствующие координаты равны.
Противоположным вектором называется вектор противоположный данному.
Отсюда следует, что координаты такого вектора будут противоположны координатам данного вектора, то есть, — a → = ( — a x ; — a y ) .
Все вышеизложенное можно аналогично определить и для прямоугольной системы координат, заданной в трехмерном пространстве. В такой системе координат имеет место быть тройка координатных векторов i → , j → , k → , а произвольный вектор a → раскладывается не по двум, а уже по трем координатам, причем единственным образом и имеет вид a → = a x · i → + a y · j → + a z · k → , а коэффициенты этого разложения ( a x ; a y ; a z ) называются координатами вектора в данной (трехмерной) системе координат.
Следовательно, координатные векторы в трехмерном пространстве принимают также значение 1 и имеют координаты i → = ( 1 ; 0 ; 0 ) , j → = ( 0 ; 1 ; 0 ) , k → = ( 0 ; 0 ; 1 ) , координаты нулевого вектора также равны нулю 0 → = ( 0 ; 0 ; 0 ) , и в таком случае два вектора будут считаться равными, если все три соответствующие координаты векторов между собой равны a → = b → ⇔ a x = b x , a y = b y , a z = b z , и координаты противоположного вектора a → противоположны соответствующим координатам вектора a → , то есть, — a → = ( — a x ; — a y ; — a z ) .
Координаты радиус-вектора точки
Чтобы ввести данное определение, требуется показать в данной системе координат связь координат точки и координат вектора.
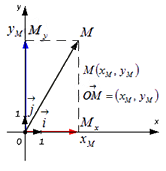
Пусть нам дана некоторая прямоугольная декартова система координат O x y и на ней задана произвольная точка M с координатами M ( x M ; y M ) .
Вектор O M → называется радиус-вектором точки M .
Определим, какие координаты в данной системе координат имеет радиус-вектор точки
Вектор O M → имеет вид суммы O M → = O M x → + O M y → = x M · i → + y M · j → , где точки M x и M y это проекции точки М на координатные прямые Ox и Oy соответственно (данные рассуждения следуют из определения проекция точки на прямую), а i → и j → — координатные векторы, следовательно, вектор O M → имеет координаты ( x M ; y M ) в данной системе координат.
Иначе говоря, координаты радиус-вектора точки М равны соответствующим координатам точки М в прямоугольной декартовой системе координат.
Аналогично в трехмерном пространстве радиус-вектор точки M ( x M ; y M ; z M ) разлагается по координатным векторам как O M → = O M x → + O M y → + O M z → = x M · i → + y M · j → + z M · k → , следовательно, O M → = ( x M ; y M ; z M ) .