
Пугающие школьника два слова — вектор и скаляр — на самом деле не являются страшными. Если подойти к теме с интересом, то все можно понять. В данной статье рассмотрим, какая величина является векторной, а какая скалярной. Точнее, приведем примеры. Каждый ученик, наверное, обращал внимание, что в физике некоторые величины обозначаются не только символом, но и стрелкой сверху. Что они обозначают? Об этом будет сказано ниже. Постараемся разобраться, чем отличается векторная величина от скалярной.
- Примеры векторов. Как они обозначаются
- Положительные и отрицательные величины
- Векторная или скалярная величина?
- Вектор и скаляр в формулах
- Два вида физических величин: скалярные величины и векторные величины
- Особенности векторного управления электроприводами
- Математический аппарат векторного управления
- Смотреть что такое «Векторное управление» в других словарях:
- Что такое асинхронный двигатель?
- Линейная скалярная рабочая характеристика ПЧ
- Основной минус скалярной вольт-частотной характеристики
- Преимущества векторного управления
- Терминологические нюансы[править | править код]
- Векторное управление без обратной связи
- Управление частотными контроллерами
- Управление частотными контроллерами
- Векторное управление с обратной связью
Примеры векторов. Как они обозначаются
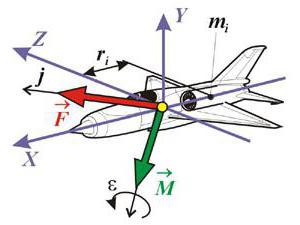
Что подразумевается под вектором? То, что характеризует движение. Не важно, в пространстве или на плоскости. Какая величина является векторной вообще? Например, летит самолет с определенной скоростью на какой-то высоте, имеет конкретную массу, начал движение из аэропорта с нужным ускорением. Что относится к движению самолета? Что заставило его лететь? Конечно, ускорение, скорость. Векторные величины из курса физики являются наглядными примерами. Говоря прямо, векторная величина связана с движением, перемещением.
Вода тоже движется с определенной скоростью с высоты горы. Видите? Движение осуществляется за счет не объема или массы, а именно скорости. Теннисист дает возможность мячику двигаться при помощи ракетки. Он задает ускорение. К слову сказать, приложенная в данном случае сила также является векторной величиной. Потому что она получается вследствие заданных скоростей и ускорений. Сила способна также меняться, осуществлять конкретные действия. Ветер, который колышет листья на деревьях, тоже можно считать примером. Так как имеется скорость.
Положительные и отрицательные величины
Векторной величиной называется величина, которая имеет направление в окружающем пространстве и модуль. Снова появилось пугающее слово, на этот раз модуль. Представьте, что нужно решить задачку, где будет фиксироваться отрицательное значение ускорения. В природе отрицательных значений, казалось бы, не существует. Как скорость может быть отрицательной?
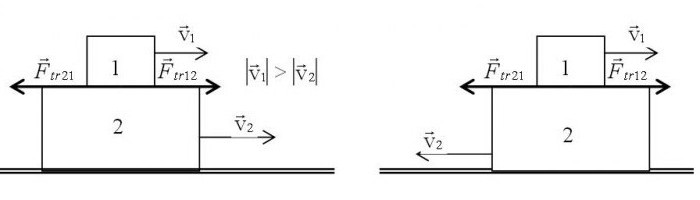
У вектора есть такое понятие. Это касается, например, сил, которые приложены к телу, но имеют разные направления. Вспомните третий закон Ньютона, где действие равно противодействию. Ребята перетягивают канат. Одна команда в синих футболках, вторая — в желтых. Вторые оказываются сильнее. Допустим, что вектор их силы направлен положительно. В то же время у первых не получается натянуть канат, но пытаются. Возникает противодействующая сила.
Векторная или скалярная величина?
Поговорим о том, чем отличается векторная величина от скалярной. Какой параметр не имеет никакого направления, но имеет свое значение? Перечислим некоторые скалярные величины ниже:
- время (секунда, минута, день, год);
- масса (грамм, килограмм, тонна);
- длина, расстояние (сантиметр, метр, километр);
- площадь и объем (метр квадратный и кубический);
- температура (градус Цельсия, Фаренгейт);
- доза радиации, излучения (бар, рентген);
- уровень шума, вибрации (децибел).
Имеют ли все они направление? Нет. Какая величина является векторной, а какая скалярной, можно показать только наглядными примерами. В физике есть такие понятия не только в разделе «Механика, динамика и кинематика», а так же в параграфе «Электричество и магнетизм». Сила Лоренца, индукция, магнитное поле — все это так же векторные величины.
Вектор и скаляр в формулах
В учебниках по физике часто встречаются формулы, в которых есть стрелочка сверху. Вспомните второй закон Ньютона. Сила («F» со стрелочкой сверху) равна произведению массы («m») и ускорения («a» со стрелочкой сверху). Как говорилось выше, сила и ускорение являются величинами векторными, а вот масса — скалярной.
К сожалению, не во всех изданиях есть обозначение этих величин. Наверное, сделано это для упрощения, чтобы школьников не вводить в заблуждение. Лучше всего покупать те книги и справочники, в которых обозначены векторы в формулах.
То, какая величина является векторной, покажет иллюстрация. Рекомендуется обращать внимание на картинки и схемы на уроках физики. Векторные величины имеют направление. Куда направлена сила тяжести? Конечно же, вниз. Значит, стрелочка будет показана в том же направлении.
В технических вузах изучают физику углубленно. В рамках многих дисциплин преподаватели рассказывают о том, какие величины являются скалярными и векторными. Такие знания требуются в сферах: строительство, транспорт, естественные науки.
Два вида физических величин: скалярные величины и векторные величины
«Что-то я не помню такой темы в физике» — первое, что, наверное, пришло вам в голову. Да, вы правы — тема незаметная, но в некоторых учебниках она присутствует. «А нужна она мне для ЕГЭ?» Нужна. Точно нужна. Очень нужна. Постоянно нужна.
Давайте приступим. Надо запомнить, что в физике (школьной) есть два типа физических величин:
- скалярная величина;
- векторная величина.
Векторная величина. Что это такое? Давайте вспомним (а для тех, кто не знал — узнаем), что
вектор — это направленный отрезок .
Стрелка — по-простому. У стрелки (вектора) есть длина (длина стрелки) и направление. Вектор — это нечто , что обладает длиной и направлением .
Примеры векторных величин: сила F ⃗ vec F ⃗ , скорость V ⃗ vec V ⃗ .

Направление вектора изображается на картинке. Куда показывает вектор — туда он и направлен. Например, бывает так, что вектор направлен вверх, вниз и т.д. Вектор может быть направлен вдоль какой-то плоскости. Примеры можете видеть на картинках.
Может возникнуть вопрос: а как отличить векторную величину от скалярной ? Или так: как я узнаю, что передо мной вектор, а не скаляр?
Ну, самое простое — это опыт. Решая задачи, читая теоретический материал, вы со временем запомните, какие величины векторные, а какие скалярные. Физических величин не так много, как может показаться.
А способ чуть посложнее — это представить эти величины и решить для себя: могут они иметь направление? Если да — то это вектор, если нет — скаляр.
Например: заряд конденсатора. Если заряд имеет направление, то куда он направлен? Непонятно — поэтому, скорее всего, заряд — это скалярная величина.
Другой пример: длина отрезка. Если эта физическая величина имеет направление, то откуда куда она направлена: от точки 1 до точки 2? Или от точки 2 до точки 1? Трудно выбрать — поэтому, скорее всего, длина отрезка — это скаляр.

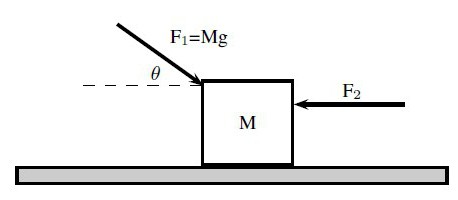
Какие из представленных на рисунках величин являются скалярными, а какие — векторными?
Особенности векторного управления электроприводами
С целью регулировки угловой скорости вращения ротора, а также крутящего момента на валу современных бесщеточных двигателей, применяют либо векторное, либо скалярное управление электроприводом.
Более всего распространение получило скалярное управление асинхронным двигателем, когда для управления например скоростью вращения вентилятора или насоса, достаточно удерживать постоянной скорость вращения ротора, для этого хватает сигнала обратной связи от датчика давления или от датчика скорости.
Принцип скалярного управления прост: амплитуда питающего напряжения является функцией частоты, причем отношение напряжения к частоте оказывается приблизительно постоянным.
Конкретный вид этой зависимости связан с нагрузкой на валу, однако принцип остается таковым: повышаем частоту, а напряжение при этом пропорционально повышается в зависимости от нагрузочной характеристики данного двигателя.
В итоге магнитный поток в зазоре между ротором и статором поддерживается почти постоянным. Если же отношение напряжения к частоте отклонить от номинального для данного двигателя, то двигатель либо перевозбудится, либо недовозбудится, что приведет к потерям в двигателе и к сбоям в рабочем процессе.
Таким образом скалярное управление позволяет добиться почти постоянного момента на валу в рабочем диапазоне частот независимо от частоты, однако на низких скоростях момент все же снижается (чтобы этого не произошло, необходимо повысить отношение напряжения к частоте), поэтому для каждого двигателя имеет место строго определенный рабочий диапазон скалярного управления.
Кроме того, невозможно построить систему скалярного регулирования скорости без датчика скорости, установленного на валу, ибо нагрузка сильно влияет на отставание реальной скорости вращения ротора от частоты питающего напряжения. Но даже с датчиком скорости при скалярном управлении не получится с высокой точностью регулировать момент (по крайней мере так, чтобы это было экономически целесообразно).
В этом и заключаются недостатки скалярного управления, объясняющие относительную немногочисленность сфер его применения, ограниченных в основном обычными асинхронными двигателями, где зависимость скольжения от нагрузки не является критичной.

Для избавления от названных недостатков, в далеком 1971 году инженеры компании Сименс предложили использовать векторное управление двигателем, при котором контроль осуществляется с обратной связью по величине магнитного потока. Первые системы векторного управления содержали датчики потока в двигателях.
Сегодня подход к данному методу несколько иной: математическая модель двигателя позволяет рассчитывать скорость вращения ротора и момент на валу в зависимости от текущих токов фаз (от частоты и величин токов в обмотках статора).
Этот более прогрессивный подход предоставляет возможность независимо и почти безынерционно регулировать как момент на валу, так и скорость вращения вала под нагрузкой, ибо в процессе управления учитываются еще и фазы токов.
Некоторые более точные системы векторного управления оснащены схемами обратной связи по скорости, при этом системы управления без датчиков скорости именуются бездатчиковыми.
Так, в зависимости от области применения того или иного электропривода, его система векторного управления будет иметь свои особенности, свою степень точности регулировки.
Когда требования к точности регулировки скорости допускают отклонение до 1,5%, а диапазон регулировки — не превышает 1 к 100, то бездатчиковая система вполне подойдет. Если же требуется точность регулировки скорости с отклонением не более 0,2%, а диапазон сводится до 1 к 10000, то необходимо наличие обратной связи по датчику скорости на валу. Наличие датчика скорости в системах векторного управления позволяет точно регулировать момент даже при низких частотах до 1 Гц.
Итак, векторное управление дает следующие преимущества. Высокую точность управления скоростью вращения ротора (и без датчика скорости на нем) даже в условиях динамически изменяющейся нагрузки на валу, при этом рывков не будет. Плавное и ровное вращение вала на малых скоростях. Высокий КПД в силу низких потерь в условиях оптимальных характеристик напряжения питания.
Не обходится векторное управление без недостатков. Сложность вычислительных операций. Необходимость задавать исходные данные (параметры регулируемого привода).
Для группового электропривода векторное управление принципиально не годится, здесь лучше подойдет скалярное.
является методом управления синхронными и асинхронными двигателями , не только формирующим гармонические токи (напряжения) фаз (скалярное управление), но и обеспечивающим управление магнитным потоком ротора. Первые реализации принципа векторного управления и алгоритмы повышенной точности нуждаются в применении датчиков положения (скорости) ротора.
В общем случае под «векторным управлением
» понимается взаимодействие управляющего устройства с так называемым «пространственным вектором «, который вращается с частотой поля двигателя.
Математический аппарат векторного управления
Wikimedia Foundation . 2010 .
Смотреть что такое «Векторное управление» в других словарях:
- Калька с нем. Vektorregelung . Метод управления скоростью вращения и/или моментом электрического двигателя с помощью воздействия преобразователем электропривода на векторные составляющие тока статора электродвигателя. В русскоязычной литературе в … Википедия
Решение задачи оптимального управления математической теории, в к рой управляющее воздействие u=u(t).формируется в виде функции времени (тем самым предполагается, что по ходу процесса никакой информации, кроме заданной в самом начале, в систему… … Математическая энциклопедия
— (частотно управляемый привод, ЧУП, Variable Frequency Drive, VFD) система управления частотой вращения ротора асинхронного (или синхронного) электродвигателя. Состоит из собственно электродвигателя и частотного преобразователя … Википедия
У этого термина существуют и другие значения, см. ЧПУ (значения). Эту страницу предлагается объединить с CNC. Пояснение причин и обсуждение на странице Википедия:К объединению/25 ф … Википедия
Статор и ротор асинхронной машины 0.75 кВт, 1420 об/мин, 50 Гц, 230 400 В, 3.4 2.0 A Асинхронная машина это электрическая машина переменного тока … Википедия
— (ДПР) деталь электродвигателя. В коллекторных электродвигателях датчиком положения ротора является щёточно коллекторный узел, он же является и коммутатором тока. В бесколлекторных электродвигателях датчик положения ротора может быть разных видов … Википедия
ДС3 ДС3 010 Основные данные Страна постройки … Википедия
Асинхронная машина это электрическая машина переменного тока, частота вращения ротора которой не равна (меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. Асинхронные машины наиболее распространённые электрические… … Википедия
Для получения высокого качества управления ЭП в статических и динамических (переходных) режимах необходимо иметь возможность быстрого непосредственного управления моментом двигателя.
Момент любого двигателя в каждый отрезок времени определяется величиной (амплитудой) и фазой двух моментообразующих составляющих: тока и магнитного потока. В АД токи и потокосцепления статора и ротора вращаются с одинаковыми скоростями, имеют разные, изменяющиеся во времени фазовые параметры и не подлежат непосредственному измерению и управлению. Доступной управляемой переменной в АД является ток статора, имеющий составляющие, образующие магнитный поток и момент. Фазовая ориентация этих двух составляющих может быть осуществлена только внешним управляющим устройством, чем и обусловлен термин “векторное управление”.
В структуре электропривода двигатель рассматривается как электромеханический преобразователь ЭМП в виде идеализированного двигателя. Его ротор не обладает массой и механической энергией, не имеет механических потерь энергии и жестко связан с реальным физическим ротором, относящимся к механической части ЭП. Такой двигатель может быть представлен электромеханическим многополюсником, содержащим n пар электрических выводов по числу n обмоток, и одну пару механических выводов (смотри рисунок 2). На механических выводах в результате электромеханического преобразования (ЭМТ) энергии при скорости w
развивается электромагнитный момент M. Момент M является выходной величиной ЭМП и входной для механической части электропривода. Скорость
w
определяется условиями движения механической части, но для ЭМП может рассматриваться как независимая переменная. Механические переменные
M
и
w
связывают ЭМП с механической частью в единую взаимосвязанную систему. Все процессы в двигателе описываются системой уравнений электрического равновесия (число уравнений равно числу обмоток) и уравнением электромеханического преобразования энергии. Для этого в теории ЭП используют двухфазную модель обобщенного ЭП (смотри рисунок 1), к которой приводятся абсолютно все виды и типы электрических машин:
Рисунок 1 – Модель обобщенного ЭМП.
– неподвижные оси статора;
d,q
– вращающиеся оси ротора;
φ
– угол поворота ротора; — угловая скорость ротора;
Уравнение электрического равновесия i
Рисунок 2 – Схема векторного управления
Схема векторного управления состоит из трех основных функциональных частей:
– блок регуляторов переменных;
– блок вычисления переменных;
– блок задания переменных;
поступают задающие сигналы скорости и потока, и сигналы обратной связи (с выхода
БВП
) – ориентированные по полю значения составляющих тока статора, потокосцепления ротора, и скорости.
БРП
содержит набор регуляторов потока, момента, тока, на выходе которых формируются также ориентированные по полю сигналы задания составляющих тока статора.
осуществляет фазовые и координатные преобразования задающих
d
–
q
переменных в систему трехфазных сигналов управления
ШИМАИН
. Блок
БВП
вычисляет текущие значения амплитудных и фазовых параметров
d
–
q
переменных АД, осуществляя фазовые и координатные преобразования реальных трёхфазных сигналов токов и напряжений АД, поступающих с выходов соответствующих датчиков.
Координатные преобразования, осуществляемые блоком БВП
, заключаются в переходе от реальных координат трёхфазной системы статора АД с осями
d
,
q
(преобразование 3 → 2). Блок
БЗП
осуществляет обратные координатные преобразования (2 → 3), от
d—q
к
a,b,c.
Фазовые преобразования в этих блоках обеспечивают привязку фазовых параметров переменных в двух системах координат.
На надежность, стоимость и качество характеристик ЭП влияют число измеряемых параметров и точность измерений. Для векторного управления АД надо измерять хотя бы две из четырех, доступных к измерению переменных:
- Токи статора АД;
- Напряжения на зажимах АД;
- Угловая скорость ротора АД;
- Угловое положение ротора АД;
Векторное управление позволяет практически в любой момент времени, при любом положении ротора относительно статора, при любой угловой скорости и нагрузке на машину, получить максимальный cos φ АД. Это, в свою очередь, ощутимо повышает К.П.Д и момент эл. машины, который, в данном случае, практически не зависит от угловой скорости двигателя.
Для осуществления возможности регулирования момента и скорости в современных электроприводах используются следующие методы частотного управления, такие как:
Наибольшее распространение получили асинхронные электроприводы со скалярным управлением. Его используют в приводах компрессоров, вентиляторов, насосов и прочих механизмов в которых необходимо удерживать на определенном уровне или скорость вращения вала электродвигателя (применяется датчик скорости), либо какого-то технологического параметра (к примеру, давление в трубопроводе, с применением соответствующего датчика).
Принцип действия скалярного управления асинхронным двигателем — амплитуда и частота питающего напряжения изменяются по закону U/f^n = const, где n>=1. То, как будет выглядеть данная зависимость в конкретном случае, зависит от требований предъявляемых нагрузкой электроприводу. Как правило, в качестве независимого воздействия выступает частота, а напряжение при определенной частоте определяется видом механической характеристики, а также значениями критического и пускового моментов. Благодаря скалярному управлению обеспечивается постоянная перегрузочная способность асинхронного двигателя, независящая от частоты напряжения, и все же при довольно низких частотах может произойти значительное снижение момента, развиваемого двигателем. Максимальное значение диапазона скалярного управления, при котором возможно осуществление регулирования значения скорости вращения ротора электродвигателя, без потери момента сопротивления не превышает 1:10.
Скалярное управление асинхронным двигателем довольно просто реализуется, но все же имеются два значительных недостатка. Во-первых, если на валу не установлен датчик скорости, то невозможно осуществлять регулирование значения скорости вращения вала, поскольку она зависит от воздействующей на электропривод нагрузки. Установка датчика скорости с легкостью решает данную проблему, но еще одним значительным недостатком остается – отсутствие возможности регулирования значения момента на валу двигателя. Можно конечно установить датчик момента, но стоимость подобных датчиков, как правило, превышает стоимость самого электропривода. Причем, даже если установить датчик управления моментом, то процесс управления этим самым моментом окажется невероятно инерционным. Еще одно «но» — скалярное управление асинхронным двигателем характеризуется тем, что невозможно осуществление одновременного регулирования скорости и момента, поэтому приходится осуществлять регулирование той величины, которая в данный момент времени наиболее важна в силу условий технологического процесса.
Дабы устранить недостатки, которыми обладает скалярное управление двигателем, еще в 71-м году прошлого века компанией SIEMENS было предложено внедрение метода векторного управления двигателем. В первых электроприводах с векторным управлением использовались двигатели, в которых были встроены датчики потока, что значительно ограничивало область применения подобных приводов.
Система управления современных электроприводов содержит в себе математическую модель двигателя, позволяющую рассчитать скорость вращения и момент вала. Причем в качестве необходимых датчиков устанавливаются только датчики тока фаз статора двигателя. Специально разработанная структура системы управления обеспечивает независимость и практически безынерционность регулирования основных параметров – момент вала и скорость вращения вала.
К сегодняшнему дню сформировались следующие системы векторного управления асинхронным двигателем:
- Бездатчиковые – на валу двигателя отсутствует датчик скорости,
- Системы, имеющие обратную связь по скорости.
Применение методов векторного управления зависит от области применения электропривода. Если диапазон измерения значения скорости не превышает 1:100, а требования, предъявляемые к точности, колеблются в пределах ±1,5%, то используется бездатчиковая система управления. Если измерение скорости осуществляется в пределах достигающих значений 1: 10000 и больше, а уровень точности должен быть довольно высоким (±0,2% при частоте вращения ниже 1 Гц), или же необходимо позиционировать вал или осуществлять регулирование момента на валу при низких частотах вращения, то применяется система, имеющая обратную связь по скорости.
Преимущества векторного метода управления асинхронным двигателем:
- Высокий уровень точности при регулировании скорости вращения вала, несмотря даже на возможное отсутствие датчика скорости,
- Осуществление вращения двигателя на малых частотах происходит без рывков, плавно,
- Если установлен датчик скорости, то можно достичь номинального значения момента на валу даже при нулевом значении скорости,
- Быстрое реагирование на возможное изменение нагрузки – резкие скачки нагрузки практически не отражаются на скорости электропривода,
- Высокий уровень КПД двигателя, за счет сниженных потерь из-за намагничивания и нагрева.
Несмотря на очевидные преимущества, метод векторного управления имеет и определенные недостатки – большая сложность вычислений, для работы необходимо знание параметров двигателя. Помимо всего прочего колебания значения скорости при постоянной нагрузке значительно больше, нежели при скалярном методе управления. Кстати, существуют такие сферы, где используются электроприводы исключительно со скалярным методом управления. К примеру, групповой электропривод, в котором один преобразователь подпитывает несколько двигателей.
Преобразователь частоты регулирует момент и скорость вращения асинхронного двигателя, используя один из двух основных методов частотного управления — скалярный или векторный. Рассмотрим подробнее особенности этих методов.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.
Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает. Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
Терминологические нюансы[править | править код]
Поскольку принцип векторного управления был изобретен в ФРГ, то в русскоязычной литературе нередко встречается термин «векторное регулирование
», являющийся калькой с немецкого «Vektorregelung». Такое определение нельзя считать ошибочным, однако по установившемся нормам русского технического языка более правильным будет использование именно термина «
векторное управление
». Кроме того часто данный метод называют также «принципом ориентирования по полю», что также является буквальным переводом с немецкого «Prinzip Feldorientir».
Векторное управление без обратной связи
В этом случае частотный преобразователь вычисляет скорость вращения двигателя по математической модели на основе ранее введенных данных (параметров двигателя) и данных о мгновенных значениях тока и напряжения. Опираясь на полученные расчеты, ПЧ принимает решение об изменении выходного напряжения.
Перед включением векторного бессенсорного режима необходимо тщательно выставить номинальные параметры двигателя: напряжение, ток, частоту, скорость (обороты), мощность, количество полюсов, а также сопротивление обмоток и индуктивные параметры. Если какие-то значения неизвестны, рекомендуется провести автотестирование двигателя на холостом ходу. Некоторые модели векторных преобразователей частоты устанавливают параметры по умолчанию для стандартного двигателя после введения номинальных значений. Также необходимо задать пределы временных и токовых параметров векторного управления.
Управление частотными контроллерами
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.