Задачи по алгебре. Выпуск 2.
Задача 1. Найти 5А, если
 .
.

Задача 2. Найти А +В, если

 .
.
 .
.
Задача 3. Найти АВ , если

 .
.

Задача 4. Найти транспонированную матрицу относительно матрицы
.
 .
.
Задача 5. Найти  , если
, если
.

Задача 6. Найти , если
 .
.

Задача 7. Вычислить определитель

Решение: Разложим определитель по первой строке:


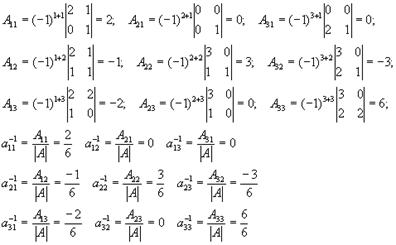
Задача 8. Найти обратную матрицу для матрицы
Определитель нулю не равен, следовательно, обратная матрица существует. Найдем алгебраические дополнения (знаки их учтем сразу), т. е.
Мы сами можем проверить результат, Известно, что  . Так ли это?
. Так ли это?
Получилась единичная матрица. Значит, обратная матрица найдена верно.
Задача 9. Решить систему матричным способом:
Не является ли матрица А вырожденной? Найдем ее определитель: det А =1•[-1•4 – 1•2] – 1•[2•4 – 2•4] + 2•[2•1 – 4•(-1)] = -6 + 12 = 6
Определитель не равен нулю, то есть матрица не вырожденная. Значит, существует обратная матрица
Можно убедиться проверкой в правильности решения: подставим вектор Х в первоначальное матричное уравнение.
Действительно вектор Х удовлетворяет заданной системе.
Задача 10. Решить систему с помощью формул Крамера :
 .
.
Задача 11. Вычислить :

Раскроем скобки и получим:

Так как  , то получаем:
, то получаем:
Задача 12. Вычислить, пользуясь формулой Муавра:

Представим число z в тригонометрической форме.
 , следовательно, а=1, b =1 и
, следовательно, а=1, b =1 и  .
.


 .
.
 .
.
Применим формулу Муавра:
 ,
,

Задача 13. Выполнить деление с остатком f ( x )= x 3 — x 2 — x на x -1+2 i .
Решение: Составим таблицу, в которой над чертой расположены коэффициенты многочлена f ( x ), под чертой соответствующие коэффициенты частного и остаток, последовательно вычисляемые, а слева сбоку – значение c = 1-2 i в данном примере.
Таким образом: f ( x )= x 3 — x 2 — x =( x -1+2 i ) ( x 2 -2 ix -5-2 i )-9+8 i .
Ответ : f(x)=x 3 -x 2 -x=(x-1+2i) (x 2 -2ix-5-2i)-9+8i.
Задача 14. Применяя процесс ортогонализации, построить ортогональный базис подпространства, натянутого на данную систему векторов.
 ,
,  ,
, 


 ;
; 








Задача 15. Проверить, что векторы х = (1, -2, 2, -3), у = (2, -3, 2, 4) ортогональны, и дополнить их до ортогональных базисов.
Решение: Найдем скалярное произведение данных векторов: ( х , у) = 2+6+4-12 = 0  х , у – ортогональны .
х , у – ортогональны .
Найдем векторы, дополняющие данную систему векторов до ортогонального базиса.
Пусть z = (z1, z2, z 3, z 4) попарно ортогонален с данными векторами, т.е. ( x , z ) = 0 и ( y , z ) = 0. Получаем следующую систему:
Эта система имеет множество решений, например,
Пусть теперь k = ( k 1, k 2, k 3, k 4) попарно ортогонален с векторами x , y , z . Получаем следующую систему:
Эта система имеет множество решений, например,
Таким образом, можно добавить векторы
(2, 2, 1, 0), (-5, 2, 6, 1).
Задача 16. Найти векторы, дополняющие следующую систему векторов  и
и  до ортонормированного базиса.
до ортонормированного базиса.
, 
, 
Пусть z = (z1, z2, z 3) попарно ортогонален с данными векторами, т.е. ( x , z ) = 0 и ( y , z ) = 0. Получаем следующую систему:
Эта система имеет множество решений, например,
Нормируя этот вектор, получим вектор, дополняющий данную систему векторов до ортонормированного базиса:

Задача 17. Доказать, что проектирование трехмерного пространства на координатную плоскость натянутую на вектора e 1, e 2 параллельно оси координат вектора e 3, является линейным преобразованием, и найти его матрицу в базисе e 1, e 2, e 3..
Решение: Пусть L — трёхмерное пространство, e 1, e 2, e 3 — базис L , преобразование  — проектирование L на координатную плоскость векторов e 1, e 2 параллельно оси координат вектора e 3.
— проектирование L на координатную плоскость векторов e 1, e 2 параллельно оси координат вектора e 3.
Пусть х — произвольный вектор L , т.е. x Î L .
Пусть x =( x 1, x 2, x 3) — координаты вектора x в базисе e 1, e 2, e 3, т.е. x = x 1 e 1+ x 2 e 2+ x 3 e 3. Тогда при преобразовании j имеем:
Докажем, что для любых x Î L , y Î L и числа l
1) j ( x+y )= j (x)+ j (y),
2) j ( l x )= l j (x).
j ( l x ) = ( l x 1, l x 2, 0) = l ( x 1, x 2, 0) = l j ( x ) .
Следовательно, j — линейное преобразование.
Найдем матрицу преобразования j в базисе e 1, e 2, e 3. Известно, что координаты образа j ( x ) вектора x при линейном преобразовании выражаются через координаты вектора x в том же базисе при помощи матрицы преобразования A j следующим образом:
 .
.
Откуда следует, что
 .
.
Задача 18. Линейное преобразование φ в базисе е 1 , е2, е3, е4 имеет матрицу
 .
.
Выпишем матрицу перехода от базиса е 1 ,е2,е3,е4 к новому базису:
 .
.
 .
.
Теперь найдем матрицу преобразования В j в новом базисе по формуле В j =Т -1 А j Т.
Задача 19. Найти собственные значения и собственные векторы линейного преобразования, заданного в некотором базисе матрицей:
Решение: Собственные значения являются корнями характеристического уравнения преобразования j .
Составим характеристическую матрицу:
Найдем определитель матрицы и вычислим корни характеристического уравнения:
= (2 —  )(3+ )(2+ )+3-2(3+ )-5(2+ ) =
)(3+ )(2+ )+3-2(3+ )-5(2+ ) =
= 
 +3-6-2 -10-5 =
+3-6-2 -10-5 =
= 12+4 -3  -7 -13 =
-7 -13 =  ,
,

Получим собственные значения:  или
или  .
.
Для каждого собственного значения найдем собственный вектор.
По определению имеем:  .
.
Но, в тоже время, 
Беря значением = -1, получаем с.л.а .у . :

Собственными векторами будут являться вектора, входящие в фундаментальную систему решений (ф.с.р.) этой с.л.а .у . Найдем ф.с.р. это с.л.а .у .



Таким образом, собственным вектором, отвечающим собственному значению = -1, является вектор  .
.
Задача 20. Найти нормальный вид и невырожденное линейное преобразование, приводящее к этому виду, для следующей квадратичной формы:  .
.
Решение: Ввиду отсутствия в этой форме квадратов неизвестных мы выполним сначала невырожденное линейное преобразование:


 ,
,
после чего получим 
 .
.


 , получим, что
, получим, что  .
.
Найдем невырожденное линейное преобразование.
 ,
,  ,
,  .
.
Задача 21. Следующую квадратичную форму привести к каноническому виду с целыми коэффициентами посредством невырожденного линейного преобразования с рациональными коэффициентами и найти выражение новых неизвестных через старые.
 .
.
Решение: Приведем данную форму к каноническому виду:
= =2  =
= 
=  .
.



 ,
,


получим канонический вид квадратичной формы:
 .
.
- Ортогональный и ортонормированный базисы евклидова пространства
- Выражение скалярного произведения через координаты сомножителей
- Преимущества ортонормированного базиса
- Изменение матрицы Грама при переходе от одного базиса к другому
- Свойства определителя Грама
- Изоморфизм евклидовых пространств
- Ортогональное дополнение. Ортогональная проекция вектора на подпространство
Ортогональный и ортонормированный базисы евклидова пространства
Так как евклидово пространство является линейным, на него переносятся все понятия и свойства, относящиеся к линейному пространству, в частности, понятия базиса и размерности.
Базис [math]mathbf_1,mathbf_2,ldots,mathbf_n[/math] евклидова пространства называется ортогональным , если все образующие его векторы попарно ортогональны, т.е.
Базис [math]mathbf_1,mathbf_2,ldots,mathbf_n[/math] евклидова пространства называется ортонормированным , если его векторы попарно ортогональны и длина каждого из них равна единице:
Теорема 8.5. В конечномерном евклидовом пространстве любую систему ортогональных (ортонормированных) векторов можно дополнить до ортогонального (ортонормированного) базиса.
В самом деле, по теореме 8.2 любую систему линейно независимых векторов, в частности, ортогональную (ортонормированную), можно дополнить до базиса. Применяя к этому базису процесс ортогонализации, получаем ортогональный базис. Нормируя векторы этого базиса (см. пункт 4 замечаний 8.11), получаем ортонормированный базис.
Выражение скалярного произведения через координаты сомножителей
Пусть [math]mathbf_1,mathbf_2,ldots,mathbf_n[/math] — базис евклидова пространства, в котором векторы [math]mathbf[/math] и [math]mathbf[/math] имеют координаты [math]x_1,x_2,ldots,x_n[/math] и [math]y_1,y_2,ldots,y_n[/math] соответственно, т.е.
Выразим скалярное произведение, используя следствие 3 из аксиом скалярного произведения:
Преобразуем это выражение, используя операции с матрицами:
y=begin y_1&cdots& y_n end^T[/math] — координатные столбцы векторов [math]mathbf[/math] и [math]mathbf[/math] , a [math]G(mathbf_1,mathbf_2,ldots, mathbf_n)[/math] — квадратная симметрическая матрица, составленная из скалярных произведений
которая называется матрицей Грама системы векторов [math]mathbf_1,mathbf_2,ldots,mathbf_n[/math] .
Преимущества ортонормированного базиса
Для ортонормированного базиса [math]mathbf_1,mathbf_2,ldots,mathbf_n[/math] формула (8.32) упрощается, так как из условия (8.31) следует, что матрица Грама [math]G(mathbf_1, mathbf_2,ldots,mathbf_n)[/math] ортонормированной системы [math]mathbf_1, mathbf_2,ldots, mathbf_n[/math] равна единичной матрице: [math]G(mathbf_1, mathbf_2,ldots,mathbf_n)=E[/math] .
1. В ортонормированном базисе [math]mathbf_1,mathbf_2,ldots, mathbf_n[/math] скалярное произведение векторов [math]mathbf[/math] и [math]mathbf[/math] находится по формуле: [math]langle mathbf,mathbfrangle= x_1y_1+x_2y_2+ldots+x_ny_n[/math] , где [math]x_1,ldots,x_n[/math] — координаты вектора [math]mathbf[/math] , а [math]y_1,ldots,y_n[/math] — координаты вектора [math]mathbf[/math] .
2. В ортонормированном базисе [math]mathbf_1,mathbf_2,ldots, mathbf_n[/math] длина вектора [math]mathbf[/math] вычисляется по формуле [math]|mathbf|= sqrt[/math] , где [math]x_1,ldots,x_n[/math] — координаты вектора [math]mathbf[/math] .
3. Координаты [math]x_1,ldots,x_n[/math] вектора [math]mathbf[/math] относительно ортонормированного базиса [math]mathbf_1,mathbf_2,ldots,mathbf_n[/math] находятся при помощи скалярного произведения по формулам: [math]x_1=langle mathbf,mathbf_1rangle,ldots, x_n=langle mathbf,mathbf_nrangle[/math] .
В самом деле, умножая обе части равенства [math]mathbf= x_1 mathbf_1+ldots+x_n mathbf_n[/math] на [math]mathbf_1[/math] , получаем
Аналогично доказываются остальные формулы.
Изменение матрицы Грама при переходе от одного базиса к другому
Пусть [math](mathbf)=(mathbf_1,ldots,mathbf_n)[/math] и [math](mathbf)= (mathbf_1,ldots,mathbf_n)[/math] — два базиса евклидова пространства [math]mathbb[/math] , a [math]S[/math] — матрица перехода от базиса [math](mathbf)[/math] к базису [math](mathbf)colon, (mathbf)=(mathbf)S[/math] . Требуется найти связь матриц Грама систем векторов [math](mathbf)[/math] и [math](mathbf)[/math]
По формуле (8.32) вычислим скалярное произведение векторов [math]mathbf[/math] и [math]mathbf[/math] в разных базисах:
где [math]mathoplimits_<(mathbf)>,, mathoplimits_<(mathbf)>[/math] и [math]mathoplimits_<(mathbf)>,, mathoplimits_<(mathbf)>[/math] — координатные столбцы векторов [math]mathbf[/math] и [math]mathbf[/math] в соответствующих базисах. Подставляя в последнее равенство связи [math]mathoplimits_<(mathbf)>= S mathoplimits_<(mathbf)>,[/math] [math]mathoplimits_<(mathbf)>= S mathoplimits_<(mathbf)>[/math] , получаем тождество
Отсюда следует формула изменения матрицы Грама при переходе от одного базиса к другому :
Записав это равенство для ортонормированных базисов [math](mathbf)[/math] и [math](mathbf)[/math] , получаем [math]E=S^TES[/math] , так как матрицы Грама ортонормированных базисов единичные: [math]G(mathbf_1,ldots,mathbf_n)= G(mathbf_1,ldots,mathbf_n)=E[/math] . Поэтому матрица [math]S[/math] перехода от одного ортонормированного базиса к другому является ортогональной: [math]S^=S^T[/math] .
Свойства определителя Грама
Определитель матрицы (8.33) называется определителем Грама. Рассмотрим свойства этого определителя.
1. Критерий Грама линейной зависимости векторов: система векторов [math]mathbf_1,mathbf_2, ldots, mathbf_k[/math] линейно зависима тогда и только тогда, когда определитель Грама этой системы равен нулю.
Действительно, если система [math]mathbf_1, mathbf_2, ldots,mathbf_k[/math] линейно зависима, то существуют такие числа [math]x_1,x_2,ldots,x_k[/math] , не равные нулю одновременно, что
Умножая это равенство скалярно на [math]mathbf_1[/math] , затем на [math]mathbf_2[/math] и т.д. на [math]mathbf_k[/math] , получаем однородную систему уравнений [math]G(mathbf_1,mathbf_2,ldots,mathbf_k)x=o[/math] , которая имеет нетривиальное решение [math]x=beginx_1&cdots&x_k end^T[/math] . Следовательно, ее определитель равен нулю. Необходимость доказана. Достаточность доказывается, проводя рассуждения в обратном порядке.
Следствие. Если какой-либо главный минор матрицы Грама равен нулю, то и определитель Грама равен нулю.
Главный минор матрицы Грама системы [math]mathbf_1, mathbf_2,ldots,mathbf_k[/math] представляет собой определитель Грама подсистемы векторов. Если подсистема линейно зависима, то и вся система линейно зависима.
2. Определитель Грама [math]det<G (mathbf_1,mathbf_2, ldots, mathbf_k)>[/math] не изменяется в процессе ортогонализации системы векторов [math]mathbf_1,mathbf_2,ldots,mathbf_k[/math] . Другими словами, если в процессе ортогонализации векторов [math]mathbf_1,mathbf_2,ldots,mathbf_k[/math] получены векторы [math]mathbf_1,mathbf_2,ldots,mathbf_k[/math] , то
Действительно, в процессе ортогонализации по векторам [math]mathbf_1,mathbf_2, ldots,mathbf_k[/math] последовательно строятся векторы
После первого шага определитель Грама не изменяется
Выполним с определителем [math]det G(mathbf_1, mathbf_2, ldots,mathbf_k)[/math] следующие преобразования. Прибавим ко второй строке первую, умноженную на число [math](-alpha_)[/math] , а затем ко второму столбцу прибавим первый, умноженный на [math](-alpha_)[/math] . Получим определитель
Так как при этих преобразованиях определитель не изменяется, то
Значит, после второго шага в процессе ортогонализации определитель не изменяется. Продолжая аналогично, получаем после [math]k[/math] шагов:
Вычислим правую часть этого равенства. Матрица [math]G(mathbf_1,mathbf_2,ldots, mathbf_k)[/math] Грама ортогональной системы [math]mathbf_1,mathbf_2, ldots,mathbf_k[/math] векторов является диагональной, так как [math]langle mathbf_i,mathbf_jrangle=0[/math] при [math]ine j[/math] . Поэтому ее определитель равен произведению элементов, стоящих на главной диагонали:
3. Определитель Грама любой системы [math]mathbf_1,mathbf_2,ldots, mathbf_k[/math] векторов удовлетворяет двойному неравенству
Докажем неотрицательность определителя Грама. Если система [math]mathbf_1,mathbf_2, ldots, mathbf_k[/math] линейно зависима, то определитель равен нулю (по свойству 1). Если же система [math]mathbf_1,mathbf_2,ldots, mathbf_k[/math] линейно независима, то, выполнив процесс ортогонализации, получим ненулевые векторы [math]mathbf_1,mathbf_2, ldots, mathbf_k[/math] , для которых по свойству 2:
Оценим теперь скалярный квадрат [math]langle mathbf_j,mathbf_jrangle[/math] . Выполняя процесс ортого-1нализации, имеем [math]mathbf_j= mathbf_j+ alpha_mathbf_1+ ldots+ alpha_mathbf_[/math] . Отсюда
Следовательно, по свойству 2 имеем
1. Матрица Грама любой системы векторов является неотрицательно определенной, так как все ее главные миноры также являются определителями Грама соответствующих подсистем векторов и неотрицательны в силу свойства 3.
2. Матрица Грама любой линейно независимой системы векторов является положительно определенной, так как все ее угловые миноры положительны (в силу свойств 1,3), поскольку являются определителями Грама линейно независимых подсистем векторов.
3. Определитель квадратной матрицы [math]A[/math] (n-го порядка) удовлетворяет неравенству Адамара :
Действительно, обозначив [math]a_1,a_2,ldots,a_n[/math] столбцы матрицы [math]A[/math] , элементы матрицы [math]A^TA[/math] можно представить как скалярные произведения (8.27): [math]langle a_i,a_jrangle= (a_i)^Ta_j[/math] . Тогда [math]A^TA=G(a_1,a_2,ldots,a_n)[/math] — матрица Грама системы [math]a_1,a_2,ldots,a_n[/math] векторов пространства [math]mathbb^n[/math] . По свойству 3, теореме 2.2 и свойству 1 определителя получаем доказываемое неравенство:
4. Если [math]A[/math] — невырожденная квадратная матрица, то любой главный минор матрицы [math]A^TA[/math] положителен. Это следует из пункта 2, учитывая представление произведения [math]A^TA=G(a_1,ldots,a_n)[/math] как матрицы Грама системы линейно независимых векторов [math]a_1,ldots,a_n[/math] — столбцов матрицы [math]A[/math] (см. пункт 3).
Изоморфизм евклидовых пространств
Два евклидовых пространства [math]mathbb[/math] и [math]mathbb'[/math] называются изоморфными [math](mathbbleftrightarrow mathbb’)[/math] , если они изоморфны как линейные пространства и скалярные произведения соответствующих векторов равны:
где [math](cdot,cdot)[/math] и [math](cdot,cdot)'[/math] — скалярные произведения в пространствах [math]mathbb[/math] и [math]mathbb'[/math] соответственно.
Напомним, что для изоморфизма конечномерных линейных пространств необходимо и достаточно, чтобы их размерности совпадали (см. теорему 8.3). Покажем, что это условие достаточно для изоморфизма евклидовых пространств (необходимость следует из определения). Как и при доказательстве теоремы 8.3, установим изоморфизм n-мерного евклидова пространства [math]mathbb[/math] с вещественным арифметическим пространством [math]mathbb^n[/math] со скалярным произведением (8.27). В самом деле, взяв в пространстве [math]mathbb[/math] какой-нибудь ортонормированный базис [math](mathbf)=(mathbf_1,ldots,mathbf_n)[/math] , поставим в соответствие каждому вектору [math]mathbfin mathbb[/math] его координатный столбец [math]xin mathbb^n
(mathbfleftrightarrow x)[/math] . Это взаимно однозначное соответствие устанавливает изоморфизм линейных пространств: [math]mathbbleftrightarrow mathbb^n[/math] . В ортонормированном базисе скалярное произведение векторов [math]mathbf[/math] и [math]mathbf[/math] пространства [math]mathbb[/math] находится по формуле
(см. пункт 1 преимуществ ортонормированного базиса). Такое же выражение дает скалярное произведение (8.27) координатных столбцов [math]x[/math] и [math]y[/math] , т.е. скалярные произведения соответствующих элементов равны
Следовательно, евклидовы пространства [math]mathbb[/math] и [math]mathbb^n[/math] изоморфны.
Таким образом, изучение конечномерных евклидовых пространств может быть сведено к исследованию вещественного арифметического пространства [math]mathbb^n[/math] со стандартным скалярным произведением (8.27).
Ортогональное дополнение. Ортогональная проекция вектора на подпространство
Пусть Е — евклидово пространство, а L — его подпространство. Множество L 1 — векторов в Е, ортогональных к каждому вектору подпространства L, называют ортогональным дополнением к подпространству L.
Теорема 8.6. Ортогональное дополнение IA к подпространству L евклидова пространства Е является подпространством в Е.
> Пусть уi,y2 € ZA. Тогда для любого вектора х ? L имеем: (ж, г/1) = 0 и (х,у2) = 0. Следовательно,

т.е. вектор у + у2 ортогонален любому вектору х € L. Это означает, что У1+У2 € ZA. Мы доказали, что сумма любых двух векторов множества ZA принадлежит ZA. Аналогично для любого действительного числа Л и любого х € L имеем:

т.е. вектор Л у ортогонален любому вектору х е L, а значит, принадлежит ZA. Таким образом, множество ZA замкнуто относительно сложения векторов и умножения векторов на числа и, следовательно, является подпространством. ?
Теорема 8.7. Конечномерное евклидово пространство Е является прямой суммой любого своего подпространства L и его ортогонального дополнения ZA, т.е. ортогональное дополнение к подпространству является его прямым дополнением.
> Пусть в пространстве L выбран ортогональный базис, состоящий из векторов ai, 02, . а&. Дополним его до ортогонального базиса пространства Е векторами fk+i, fk+2, •••, fn и по построенному базису

разложим произвольный вектор х из Е. Тогда получим  где положено
где положено

Вектор у принадлежит подпространству Z, поскольку он является линейной комбинацией векторов базиса в L. Покажем, что вектор z принадлежит ортогональному дополнению LА Для этого замечаем, что по построению векторы fk+i, fk+2, fn ортогональны базисным
векторам ai, Это очевидное следствие теоремы о размерности суммы подпространств (см. теорему 4.23). ?
Следствие 8.3. Ортогональным дополнением к подпространству ZA является подпространство L.
> Так как каждый вектор из L ортогонален каждому вектору из ZA, то подпространство L содержится в (ZA)A Кроме того, выполняются соотношения Е = L 0 ZA, Е = (L— L )- L ф ZA, и по предыдущему следствию подпространства L и (ZA) 1 — имеют одинаковую размерность. Поэтому эти подпространства совпадают. ?
Следствие 8.4. Если L — подпространство в евклидовом пространстве Е, то любой вектор х € Е имеет разложение

где хо G L, х 1 — G /А. Такое разложение единственно.
> Это утверждение — фактически расшифровка утверждения, что Е = L Ф ZA. ?
Пример 8.9. В четырехмерном пространстве Е± скалярное произведение в заданном базисе определено формулой (8.5). Построить ортогональное дополнение ZA для подпространства L = (а^аг), где a, = (1,1,1, l) r , а2 = (1, -1,1,1) т .
Решение. Векторы а и а2 составляют базис в L. Дополним эту систему до базиса в Е± векторами Ъ и 62, удовлетворяющими условиям 
и положим L = (61,62)- Векторы 61, 62 являются решениями системы из двух уравнений (ai,x) = 0, (а,2,х) = 0, и в качестве их можно взять любую фундаментальную систему решений, например, 61 = (—1,0,1,0) т , 62 = (—1,0,0,1) т . Из выбора векторов 61 и 62 следует, что они составляют базис в L L , т.е. L = L L . ?
Пусть L — подпространство евклидова пространства Е. Каждый вектор у ? Е может быть единственным способом представлен в виде

где уо ? L, а вектор у 1 — ортогонален к каждому вектору из L, т.е. у 1 — ? L х . Вектор уо называют ортогональной проекцией вектора у на пространство L и обозначают прьУ, а вектор y L называют ортогональной составляющей вектора у. Очевидно, что если у ? L, то прьу = у, и, наоборот, если прьу = : Действительно, пусть у — произвольный вектор, опущенный из конца вектора х на подпространство L и х 1 — — ортогональная составляющая вектора х, т.е. перпендикуляр, опущенный из конца вектора х на подпространство L. Тогда

поскольку концы векторов у их 1 лежат в L. Поэтому

так как векторы у — х 1 — их 1 ортогональны. ?
Доказанные утверждения является естественным обобщением известного из элементарной геометрии утверждения о том, что перпендикуляр короче любой наклонной, опущенной из той же точки на плоскость.
Длину ортогональной составляющей х 1 — вектора х принимают за кратчайшее расстояние от вектора х до подпространства L.
Ортогональная проекция вектора у на подпространство L является частным случаем проекции вектора на подпространство параллельно подпространству L2, являющемуся прямым дополнением к L (см. разд. 4.11). В случае ортогональной проекции Ь2 = Ь 1 .
На практике при отыскании ортогональной проекции вектора х на подпространство L = (ai, а2, •••?> &fc) поступают следующим образом. В разложении

вектора х на ортогональную проекцию жо = npLT и ортогональную составляющую х 1 — вектор Xq можно представить в виде линейной комбинации 
Тогда равенство х = Хо + х 1 принимает вид:

Для отыскания коэффициентов oi, 02, . о& умножим равенство (8.16) скалярно на векторы а, а2, . ак- Учитывая, что (а^аг 1- ) = = (а2,х ± ) = . = (ак,х?*?) = 0, получаем систему линейных уравнений

относительно неизвестных оц, а2, . а к. Из этой системы находят коэффициенты oi, а2, . о^. В матричной форме равенство (8.15) и система (8.17) записываются в виде

где А = (oi, а2. а*,) — матрица, для которой столбцами являются столбцы координат векторов а, а2, . а&; о — (01,02, . о*;) т — столбец высоты к. Использование системы (8.17), или, что тоже самое системы (8.19), указывает на то (см. п.8.21), что отыскание коэффициентов ai, а2, . ак для равенства (8.15) равносильно решению методом наименьших квадратов системы А о = х с неизвестным столбцом
Если система векторов oi, 2, • ••, ftfc линейно независимая, то в равенстве (8.19) матрица А т А невырожденная, так как она представляет собой матрицу Грама этой системы векторов (см. теорему 8.1). В этом случае из уравнения (8.19) однозначно определяется столбец а: 
Учитывая равенство (8.18), заключаем, что 
Пример 8.10. Для вектора х = (3,6,0) т найти ортогональную проекцию Xq на подпространство L = (а^аг) и ортогональную составляющую т х , если ay = (1, —1,0) т , т .
Решение. Запишем xq = npL.x в виде хд = ау ау + Коэффициенты ау и «2 можно найти, решив систему (8.17), которая в данном случае имеет вид:

Вычислим все скалярные произведения. В результате получим

Решая систему относительно неизвестных од иаг, находим, что од = = су2 = 3. Таким образом, пр/,т = Зау + Заг = (0,3,3) т и х^ = = х — npLT = (3,3, —3) т .
Поскольку векторы а у, а2 линейно независимые, то можно также воспользоваться формулой (8.20). Вычислив



Заметим, что если е = (ei, е2,еп) — ортоиормированный базис в евклидовом пространстве Е, а подпространство L является линейной оболочкой части базисных векторов, например, L = (ei, е2. е*,), то для любого вектора

ортогональная проекция прь-т совпадает с суммой слагаемых в разложении х по базису, соответствующих векторам, порождающим L. а ортогональная проекция — с суммой всех остальных слагаемых, т.е.

Например, для вектора х = (1,2, 3,4,5) т проекция на подпространство L = (б1,е2,ез) равна Xq = (1,2,3,0,0) т , и его ортогональная составляющая х 1 — = (0,0,0,4, 5) т . ?