Градиент потенциальной энергии
В общем случае потенциальная энергия является функцией многих координат системы материальных точек (частиц), взаимодействующих между собой. Но мы представим (получая гот же вывод), что все частицы, кроме одной, не изменяют своего положения и действие всех мы заменяем их силовым полем. Тогда потенциальная энергия частицы, движущейся среди других, lVn(x,y,Z).
Пусть положение частицы задается радиусом-вектором в системе координат x,y,z. Введем обозначения и запишем выражения для перемещения частицы и силы, которая на нес действует:

- • перемещение
- • консервативная сила
Согласно (4.4.2) и (4.3.4), получим: 
Используя полученное, последовательно определяем производную от Wa по одной из координат, считая две других постоянными (то есть выражаем частную производную).

Эти равенства согласуются с примерами, которые мы рассматривали в разделе 4.5.
Согласно 4.5.1, можно получить для взаимодействия в поле упругих сил:

Используя 4.5.3, запишем для гравитационного взаимодействия

Подставив (4.6.2) в выражение для силы (4.6.1), получим

Написанное в правой части последнего равенства выражение соответствует применению операции grad к потенциальной энергии Жп. Значит

где V — оператор набла.
Согласно (4.6.2) направление силы F указывает направление убывания потенциальной энергии. Из равенства (4.6.4) следует что вектор — градиент направлен против силы поля, т. с. в направлении максимального возрастания потенциальной энергии.
Выясним физический смысл grad любой функции. Используя
Преобразуя скалярное произведение векторов, получим

где a — угол между вектором grad Ж и вектором dr .
Отсюда dlVn-dJVn<nm), при а = grad Ж л dr = 0, т. е. когда drT’lF.
Предполагая, что перемещение происходит в направлении максимального возрастания потенциальной энергии, получим:


(Замечание: производная от скаляра по вектору есть вектор).
Полученное позволяет определить физический смысл введенной характеристики gradPF.
gradfF — вектор, равный пространственной скорости возрастания потенциальной энергии в направлении ее максимального возрастания.
Данная формулировка справедлива для любой величины, когда эта величина пространственно изменяется от точки к точке.
Сравнив (4.6.3) и (4.6.4), запишем, например, что

То сеть проекции вектора gradfT на координатные оси равны производным от Жп по соответствующим координатам.
Потенциальная энергия и вектор силы
Здесь Е = Ек + Еп — полная механическая энергия системы, Ек — кинетическая энергия в точке x1, Ек = E — Еп.
Связь между потенциальной энергией и силой
Пространство, в котором действуют консервативные силы, называется потенциальным полем. Каждой точке потенциального поля соответствует некоторое значение силы F, действующей на тело, и некоторое значение потенциальной энергии Еп. Значит, между силой F и Еп должна быть связь.
Известно, что dA = Fdr; с другой стороны, dA = -dEп, следовательно, Fdr = -dЕп, тогда.
Для компонент силы по осям x, y, z можно записать, что.
Так как вектор силы F = Fx i + Fy j + Fz k, то получим
где ∇ — оператор Гамильтона (оператор набла).
Градиент — это вектор, показывающий направление наибыстрейшего увеличения функции. Знак «-» показывает, что вектор F направлен в сторону наибыстрейшего уменьшения Еп.
Следовательно, консервативная сила равна градиенту потенциальной энергии, взятому со знаком минус. F = -grad Еп.
1.6.4. Закон сохранения механической энергии
В 40-х гг. XIX в. трудами Р. Майера, Г. Гельмгольца и Дж. Джоуля был доказан закон сохранения и превращения энергии.
Рассмотрим систему, состоящую из N частиц. Силы взаимодействия между частицами F(внутр) — консервативные. Кроме внутренних сил, на частицы действуют внешние консервативные и неконсервативные
4.4. Потенциальная энергия
Выше мы уже получили выражение для работы, совершаемой при растяжении пружины. Рассмотрим следующую систему. Нерастянутая пружина лежит на гладкой горизонтальной плоскости, один ее конец закреплен, а ко второму прикреплен грузик массой m. Начало координатной оси поместим в точку, где находится свободный конец пружины. Мы оттягиваем пружину на расстояние хmax и отпускаем грузик без начальной скорости. Каково движение грузика?
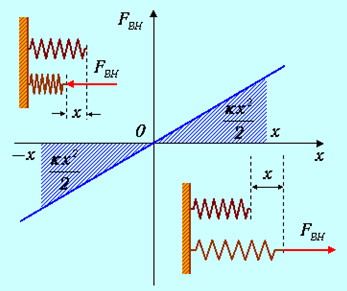
Рис 4.6. Работа при изменении длины пружинки.
В горизонтальной плоскости на грузик действует только упругая сила деформированной пружины, стремящаяся вернуть его к началу координат (положению равновесия). Под действием этой силы грузик приходит в движение. Если его координата в какой-то момент времени равна x, то в этот момент на грузик действует со стороны пружины упругая сила  . Поэтому уравнение движения грузика имеет вид
. Поэтому уравнение движения грузика имеет вид

Умножим обе части равенства на скорость грузика

Произведение в левой части можно представить в виде производной
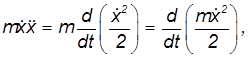
а произведение в правой части — в виде производной
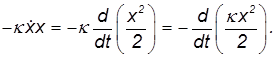
Поэтому уравнение движения грузика можно записать теперь в виде
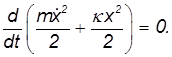
Раз производная выражения в скобках равна нулю, само это выражение не зависит от времени, оно постоянно (сохраняет свое начальное значение):
Как бы ни двигался грузик на пружинке, выписанная сумма двух слагаемых не меняется. В первом слагаемом мы узнаем кинетическую энергию грузика, а во втором — работу по растяжению (сжатию) пружины на расстояние х. Совершив эту работу, мы запасаем энергию упругой деформации пружины (ее называют потенциальной энергией). В любой момент времени грузик обладает какой-то кинетической энергией, а пружина — потенциальной.
Сумма кинетической и потенциальной энергий называется полной механической энергией Е системы.
Значение постоянной интегрирования в выражении для полной механической энергии системы «грузик — пружинка» находим, вспоминая начальные условия: при t = 0 мы отпустили грузик без начальной скорости v(0) = 0 на расстоянии x(0) = хmax от начала координат. Отсюда полная механическая энергия системы будет равна
В начальный момент времени кинетическая энергия грузика равна нулю, и полная энергия системы равна той работе, которую мы сначала совершили, растянув пружину на расстояние хmax. Затем груз двигается к началу координат с возрастающей скоростью. В момент прохождения положения равновесия (х = 0) потенциальная энергия пружины равна нулю, следовательно, кинетическая достигает максимума. Грузик проходит положение равновесия, сила упругости меняет знак и начинает его тормозить. Скорость груза обращается в нуль при х = –хmax , когда полная энергия системы снова состоит лишь из потенциальной энергии (на этот раз сжатой) пружины. Далее процесс «перекачки» потенциальной энергии в кинетическую и обратно повторяется.
На этом частном примере мы заметили, что
- сохраняется полная энергия Е системы «грузик-пружинка», равная сумме кинетической энергии К = mv 2 /2 грузика и потенциальной энергии П = kх 2 /2 пружинки;
- потенциальная энергия пружины связана с работой по ее растяжению (сжатию): П = Авнеш;
- силу упругости F = –kх = –Fвнеш со стороны деформированной пружины можно получить дифференцированием потенциальной энергии по координате:

Потенциальное поле сил. Обобщим теперь наш частный случай. Пусть на частицу в каждой точке пространства действует определенная сила F (r,t), зависящая только от положения частицы и, быть может, от времени. Поскольку действующая сила не зависит от движения частицы, мы можем считать ее атрибутом пространства. В этом случае говорят, что в пространстве задано силовое поле. Например, поле тяжести Земли мы можем рассматривать как внешнее силовое поле по отношению к таким телам, движущимся в этом поле, как люди, автомобили, поезда, самолеты, спутники, вода в реках, облака в небе и так далее, по той простой причине, что их движение никак не влияет на характеристики этого поля. Совершенно очевидно, что это обусловлено размерами Земли.
Видео 4.1. Баллистический маятник — двухстадийный процесс демонстрация сохранения импульса на первом этапе и сохранения полной механической энергии на втором этапе.
Среди силовых полей мы выделим потенциальные поля, которые можно описать некоторой скалярной функцией


Здесь Fx, Fy, Fz проекции силы на направления осей некоторой декартовой системы координат, её разложение по базису имеет вид

Как будет видно из дальнейшего, связь потенциальной энергии и силы оказывается действительно полезной, когда функция П не зависит от времени. Только этот случай и будет рассматриваться на протяжении всего курса.
Выражение для вектора силы можно записать более компактно. Для этого вводят операцию градиент — своего рода «векторное» дифференцирование функции (не путать с просто дифференцированием вектора, например, по времени):

Знак минус, поставленный впереди, к операции «градиент» отношения не имеет и присутствует в выражении для вектора силы ради удобства (см. пример с пружиной выше и текст ниже) Применение операции «градиент» (grad) к скалярному полю (скалярной функции координат) порождает векторное поле. Ясно, что расчеты движения в потенциальных полях должны быть проще хотя бы потому, что вместо трех функций (проекций силы) мы будем иметь дело лишь с одной функцией П(x,y,z)..
Рассмотрим стационарное потенциальное силовое поле (то есть потенциальное поле П(x,y,z), не зависящее явно от времени). Найдем элементарную работу сил поля при перемещении ds:
то есть элементарная работа

представляется как взятый с обратным знаком полный дифференциал функции П. С другой стороны, поскольку работа равна приращению кинетической энергии тела


то есть сохраняется сумма

Таким образом, для стационарных потенциальных полей справедливы все выводы, сделанные нами при рассмотрении частного случая грузика на пружинке. Стало быть, скалярная функция П (r), описывающая такое поле, есть не что иное как потенциальная энергия частицы в этом силовом поле.
Консервативные силы. Проинтегрируем полученное соотношение

вдоль траектории тела и получим важное свойство стационарных потенциальных полей:

Здесь П1 = П(r1) и П2 = П(r2) — значения потенциальной энергии в начальной r1 и конечной r2 точках перемещения. Соотношение, связывающее работу силы и изменение потенциальной энергии тела, означает, что
Работа A12, совершаемая над частицей силами стационарного потенциального поля, не зависит от формы траектории движения частицы и определяется только ее начальным и конечным положением в пространстве.
Силы стационарного потенциального поля называются консервативными.
Если работа сил поля положительна (частица перемещается под действием сил поля), то ее потенциальная энергия уменьшается: П2
Видео 4.2. Маятник Галилея — демонстрация сохранения полной механической энергии при движении в однородном поле тяжести.
Поле центральных сил
Поле центральных сил (центрально симметричное силовое поле) таково, что сила в каждой точке направлена по радиус-вектору, который начинается в центре симметрии поля, и величина силы зависит только от расстояния до этого центра.
Другой пример. Вычислим работу произвольной центральной стационарной силы при перемещении её точки приложения из некоторой произвольной точки пространства 1, находящейся на расстоянии r1 до центра поля, в некоторую произвольную точку 2, находящуюся на расстоянии r2 от центра поля. Воспроизведенные ниже выкладки показывают, что траектория перемещения точки приложения силы может быть любой — результат не зависит от её формы.
Общий вид центральной силы следующий

Здесь радиус-вектор  начинается в центре поля. Примерами могут служить поле точечного электрического заряда, находящегося в начале координат, или гравитационное поле сферически симметричного объекта с центром в начале координат. Подставив (4.4.4) в общее определение работы, получаем:
начинается в центре поля. Примерами могут служить поле точечного электрического заряда, находящегося в начале координат, или гравитационное поле сферически симметричного объекта с центром в начале координат. Подставив (4.4.4) в общее определение работы, получаем:
Криволинейный интеграл вида (4.4.5) легко превращается в обычный интеграл с помощью весьма полезного тождества (4.4.6) ниже. Дифференцируя определение квадрата модуля вектора

и сокращая на двойку имеем для любого вектора:(4.4.6)

То есть, скалярное произведение вектора на его приращение равно произведению модуля этого вектора на приращение его модуля. Заменяя в (4.4.5) скалярное произведение  на обычное произведение rdr и сокращая на r, получаем
на обычное произведение rdr и сокращая на r, получаем
Если функция φ(r) есть первообразная для f(r), то окончательно имеем:
Из формулы (4.4.8) видно, что величина работы определяется только положением начальной и конечной точек и действительно не зависит от формы траектории перемещения точки приложения силы. Часто говорят короче: работа не зависит от пути. Работа получилась равной приращению первообразной φ(r), поэтому отождествлять её с потенциальной энергией неудобно: получится, что при совершении положительной работы растет и функция f(r). Потенциальная энергия вводится как П = –φ(r), тогда, при совершении положительной работы, потенциальная энергия убывает и можно говорить и так: работа совершается за счет убыли потенциальной энергии тела в силовом поле. Тогда
Вычисление интеграла с помощью тождества (4.4.6) иллюстрирует следующий рисунок

Рис. 4.8. Работа центральной силы
Положив потенциальную энергию в точке с радиус-вектором  равной
равной  , для её значения в произвольной точке с радиус-вектором , получим
, для её значения в произвольной точке с радиус-вектором , получим
Покажем, что операция «градиент», примененная к потенциальной энергии П(r), действительно дает нам поле центральных сил, направленных по радиус-вектору и с модулем F(r). Берем производную от П(r) по координате x как производную сложной функции:

Производная по r вычисляется без труда из формулы для потенциальной энергии:
Производная r по x равна

Аналогичные выражения получатся при дифференцировании по координатам y, z. В итоге
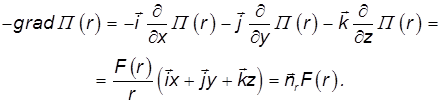
Мы убедились, что исходное центральное поле сил восстанавливается по функции потенциальной энергии:


Рис.4.9. Потенциал гравитационного поля Земли.
Говоря о центральных силах, мы также используем некоторую абстракцию. Что означает силовой центр, к которому (или от которого) направлено поле сил? Мы предполагаем, что центр неподвижен, но реально он образован какими-то физическими телами — зарядами в случае электрического поля, массами — в случае гравитационного. Просто при определенных условиях движением центра можно пренебречь. Скажем, изучая движение спутника вокруг Земли, мы, строго говоря, должны учесть, что спутник и Земля движутся вокруг общего центра масс. Но масса Земли намного превышает массу спутника, центр масс системы практически совпадает с центром Земли, и ее можно считать неподвижным центром гравитационного поля.

Рис.4.10. Зависимость формы траектории от начальной скорости тела.
Если же такого допущения сделать нельзя, то рассматривают силы взаимодействия между телами. Когда силы направлены вдоль линии, соединяющей тела, а их величина зависит только от взаимного расстояния

мы имеем дело с аналогом центральных сил. Здесь тоже можно ввести потенциальную энергию взаимодействия тел между собой П(r12), так что сила F12 между телами 1 и 2 удовлетворяет соотношению