значениях и векторах матриц
- Постановка задачи
- Метод непосредственного развертывания
- Алгоритм метода непосредственного развертывания
- Метод итераций для нахождения собственных значений и векторов
- Алгоритм метода итераций
- Метод вращений для нахождения собственных значений
- Алгоритм метода вращений
- Метод вращений Якоби численного р ешения задач на собственные значения и собственные векторы матриц
- Учебное пособие: Численное решение алгебраических проблем собственных значений
Постановка задачи
Пусть [math]A[/math] — действительная числовая квадратная матрица размера [math](ntimes n)[/math] . Ненулевой вектор [math]X= bigl(x_1,ldots,x_nbigr)^T[/math] размера [math](ntimes1)[/math] , удовлетворяющий условию
называется собственным вектором матрицы [math]A[/math] . Число [math]lambda[/math] в равенстве (2.1) называется собственным значением. Говорят, что собственный вектор [math]X[/math] соответствует (принадлежит) собственному значению [math]lambda[/math] .
Равенство (2.1) равносильно однородной относительно [math]X[/math] системе:
Система (2.2) имеет ненулевое решение для вектора [math]X[/math] (при известном [math]lambda[/math] ) при условии [math]|A-lambda E|=0[/math] . Это равенство есть характеристическое уравнение:
где [math]P_n(lambda)[/math] — характеристический многочлен n-й степени. Корни [math]lambda_1, lambda_2,ldots,lambda_n[/math] характеристического уравнения (2.3) являются собственными (характеристическими) значениями матрицы [math]A[/math] , а соответствующие каждому собственному значению [math]lambda_i,
i=1,ldots,n[/math] , ненулевые векторы [math]X^i[/math] , удовлетворяющие системе
являются собственными векторами.
Требуется найти собственные значения и собственные векторы заданной матрицы. Поставленная задача часто именуется второй задачей линейной алгебры.
Проблема собственных значений (частот) возникает при анализе поведения мостов, зданий, летательных аппаратов и других конструкций, характеризующихся малыми смещениями от положения равновесия, а также при анализе устойчивости численных схем. Характеристическое уравнение вместе с его собственными значениями и собственными векторами является основным в теории механических или электрических колебаний на макроскопическом или микроскопическом
уровнях.
Различают полную и частичную проблему собственных значений, когда необходимо найти весь спектр (все собственные значения) и собственные векторы либо часть спектра, например: [math]rho(A)= max_|lambda_i(A)|[/math] и [math]min_|lambda_i(A)|[/math] . Величина [math]rho(A)[/math] называется спектральным радиусом .
1. Если для собственного значения [math]lambda_i[/math] — найден собственный вектор [math]X^i[/math] , то вектор [math]mu X^i[/math] , где [math]mu[/math] — произвольное число, также является собственным вектором, соответствующим этому же собственному значению [math]lambda_i[/math] .
2. Попарно различным собственным значениям соответствуют линейно независимые собственные векторы; k-кратному корню характеристического уравнения соответствует не более [math]k[/math] линейно независимых собственных векторов.
3. Симметрическая матрица имеет полный спектр [math]lambda_i,
i=overline[/math] , действительных собственных значений; k-кратному корню характеристического уравнения симметрической матрицы соответствует ровно [math]k[/math] линейно независимых собственных векторов.
4. Положительно определенная симметрическая матрица имеет полный спектр действительных положительных собственных значений.
Метод непосредственного развертывания
Полную проблему собственных значений для матриц невысокого порядка [math](nleqslant10)[/math] можно решить методом непосредственного развертывания. В этом случае будем иметь
Уравнение [math]P_n(lambda)=0[/math] является нелинейным (методы его решения изложены в следующем разделе). Его решение дает [math]n[/math] , вообще говоря, комплексных собственных значений [math]lambda_1,lambda_2,ldots,lambda_n[/math] , при которых [math]P_n(lambda_i)=0
(i=overline)[/math] . Для каждого [math]lambda_i[/math] может быть найдено решение однородной системы [math](A-lambda_iE)X^i=0,
i=overline[/math] . Эти решения [math]X^i[/math] , определенные с точностью до произвольной константы, образуют систему [math]n[/math] , вообще говоря, различных векторов n-мерного пространства. В некоторых задачах несколько этих векторов (или все) могут совпадать.
Алгоритм метода непосредственного развертывания
1. Для заданной матрицы [math]A[/math] составить характеристическое уравнение (2.5): [math]|A-lambda E|=0[/math] . Для развертывания детерминанта [math]|A-lambda E|[/math] можно использовать различные методы, например метод Крылова, метод Данилевского или другие методы.
2. Решить характеристическое уравнение и найти собственные значения [math]lambda_1, lambda_2, ldots,lambda_n[/math] . Для этого можно применить методы, изложенные далее.
3. Для каждого собственного значения составить систему (2.4):
и найти собственные векторы [math]X^i[/math] .
Замечание. Каждому собственному значению соответствует один или несколько векторов. Поскольку определитель [math]|A-lambda_iE|[/math] системы равен нулю, то ранг матрицы системы меньше числа неизвестных: [math]operatorname(A-lambda_iE)=r и в системе имеется ровно [math]r[/math] независимых уравнений, а [math](n-r)[/math] уравнений являются зависимыми. Для нахождения решения системы следует выбрать [math]r[/math] уравнений с [math]r[/math] неизвестными так, чтобы определитель составленной системы был отличен от нуля. Остальные [math](n-r)[/math] неизвестных следует перенести в правую часть и считать параметрами. Придавая параметрам различные значения, можно получить различные решения системы. Для простоты, как правило, попеременно полагают значение одного параметра равным 1, а остальные равными 0.
Пример 2.1. Найти собственные значения и собственные векторы матрицы [math]Ain mathbb^[/math] , где [math]A=begin3&-2\-4&1end[/math] .
1. Запишем уравнение (2.5): [math]|A-lambda E|= begin3-lambda&-2\-4& 1-lambda end= lambda^2-4 lambda-5=0[/math] , отсюда получаем характеристическое уравнение [math]P_2(lambda)equiv lambda^2-4 lambda-5=0[/math] .
2. Находим его корни (собственные значения): [math]lambda_1=5,
3. Составим систему [math](A-lambda_iE)X^i=0,
i=1,2[/math] , для каждого собственного
значения и найдем собственные векторы:
Отсюда [math]x_1^1=-x_2^1[/math] . Если [math]x_2^1=mu[/math] , то [math]x_1^1=-mu[/math] . В результате получаем [math]X^1= bigl^T= bigl^T[/math] .
Для [math]lambda_2=-1[/math] имеем
Отсюда [math]x_2^2=2x_1^2[/math] . Если [math]x_1^2=mu[/math] , то [math]x_2^2=2mu[/math] . В результате получаем [math]X^2= bigl^T= bigl^T[/math] , где [math]mu[/math] — произвольное действительное число.
Пример 2.2. Найти собственные значения и собственные векторы матрицы [math]A= begin2&-1&1\-1&2&-1\0&0&1end[/math] .
1. Запишем характеристическое уравнение (2.5):
2. Корни характеристического уравнения: [math]lambda_=1[/math] (кратный корень), [math]lambda_3=3[/math] — собственные значения матрицы.
3. Найдем собственные векторы.
Для [math]lambda_=1[/math] запишем систему [math](A-lambda_E)cdot X^=0colon[/math]
Поскольку [math]operatorname(A-lambda_E)=1[/math] , в системе имеется одно независимое уравнение
x_3^=3[/math] , получаем [math]x_1^=1[/math] и собственный вектор [math]X^1= begin1&1&0end^T[/math] .
x_3^=1[/math] , получаем [math]x_1^=-1[/math] и другой собственный вектор [math]X^2= begin-1&0&1end^T[/math] . Заметим, что оба собственных вектора линейно независимы.
Для собственного значения [math]lambda_3=3[/math] запишем систему [math](A-lambda_3E)cdot X^3=0colon[/math]
Поскольку [math]operatorname(A-lambda_3E)=2[/math] , то выбираем два уравнения:
x_1^3=-x_2^3[/math] . Полагая [math]x_2^3=1[/math] , получаем [math]x_1^3=-1[/math] и собственный вектор [math]X^3=begin-1&1&0 end^T[/math] .
Метод итераций для нахождения собственных значений и векторов
Для решения частичной проблемы собственных значений и собственных векторов в практических расчетах часто используется метод итераций (степенной метод). На его основе можно определить приближенно собственные значения матрицы [math]A[/math] и спектральный радиус [math]rho(A)= max_bigl|lambda_i(A)bigr|[/math] .
Пусть матрица [math]A[/math] имеет [math]n[/math] линейно независимых собственных векторов [math]X^i,
i=1,ldots,n[/math] , и собственные значения матрицы [math]A[/math] таковы, что
Алгоритм метода итераций
1. Выбрать произвольное начальное (нулевое) приближение собственного вектора [math]X^[/math] (второй индекс в скобках здесь и ниже указывает номер приближения, а первый индекс без скобок соответствует номеру собственного значения). Положить [math]k=0[/math] .
lambda_1^= frac<x_i^><x_i^>[/math] , где [math]i[/math] — любой номер [math]1leqslant ileqslant n[/math] , и положить [math]k=1[/math] .
4. Найти [math]lambda_1^= frac<x_i^><x_i^>[/math] , где [math]x_i^, x_i^[/math] — соответствующие координаты векторов [math]X^[/math] и [math]X^[/math] . При этом может быть использована любая координата с номером [math]i,
1leqslant ileqslant n[/math] .
5. Если [math]Delta= bigl|lambda_1^- lambda_1^bigr|leqslant varepsilon[/math] , процесс завершить и положить [math]lambda_1cong lambda_1^[/math] . Если varepsilon»>[math]Delta>varepsilon[/math] , положить [math]k=k+1[/math] и перейти к пункту 3.
1. Процесс последовательных приближений
сходится, т.е. при [math]xtoinfty[/math] вектор [math]X^[/math] стремится к собственному вектору [math]X^1[/math] . Действительно, разложим [math]X^[/math] по всем собственным векторам: [math]textstyle<X^= sumlimits_^ c_iX^i>[/math] . Так как, согласно (2.4), [math]AX^i= lambda_iX^i[/math] , то
При большом [math]k[/math] дроби [math]<left(fracright)!>^k, ldots, <left(fracright)!>^k[/math] малы и поэтому [math]A^kX^= c_1lambda_1^kX^1[/math] , то есть [math]X^to X^1[/math] при [math]ktoinfty[/math] . Одновременно [math]lambda_1= limlimits_ frac<x_^><x_^>[/math] .
2. Вместо применяемой в пункте 4 алгоритма формулы для [math]lambda_1^[/math] можно взять среднее арифметическое соответствующих отношений для разных координат.
3. Метод может использоваться и в случае, если наибольшее по модулю собственное значение матрицы [math]A[/math] является кратным, т.е.
4. При неудачном выборе начального приближения [math]X^[/math] предел отношения [math]frac<x_i^><x_i^>[/math] может не существовать. В этом случае следует задать другое начальное приближение.
5. Рассмотренный итерационный процесс для [math]lambda_1[/math] сходится линейно, с параметром [math]c=frac[/math] и может быть очень медленным. Для его ускорения используется алгоритм Эйткена.
6. Если [math]A=A^T[/math] (матрица [math]A[/math] симметрическая), то сходимость процесса при определении [math]rho(A)[/math] может быть ускорена.
7. Используя [math]lambda_1[/math] , можно определить следующее значение [math]lambda_2[/math] по формуле [math]lambda_2= frac<x_i^- lambda_1 x_i^><x_i^- lambda_1 x_i^>
(i=1,2,ldots,n)[/math] . Эта формула дает грубые значения для [math]lambda_2[/math] , так как значение [math]lambda_1[/math] является приближенным. Если модули всех собственных значений различны, то на основе последней формулы можно вычислять и остальные [math]lambda_j
8. После проведения нескольких итераций рекомендуется «гасить» растущие компоненты получающегося собственного вектора. Это осуществляется нормировкой вектора, например, по формуле [math]frac<X^><|X^|_1>[/math] .
Пример 2.3. Для матрицы [math]A=begin5&1&2\ 1&4&1\ 2&1&3 end[/math] найти спектральный радиус степенным методом с точностью [math]varepsilon=0,,1[/math] .
1. Выбирается начальное приближение собственного вектора [math]X^= begin 1&1&1 end^T[/math] . Положим [math]k=0[/math] .
5. Так как varepsilon»>[math]bigl|lambda_1^- lambda_1^bigr|= 0,!75> varepsilon[/math] , то процесс необходимо продолжить. Результаты вычислений удобно представить в виде табл. 10.10.
Точность по достигнута на четвертой итерации. Таким образом, в качестве приближенного значения [math]lambda_1[/math] берется 6,9559, а в качестве собственного вектора принимается [math]X^1= begin 2838& 1682& 1888end^T[/math] .
Так как собственный вектор определяется с точностью до постоянного множителя, то [math]X^1[/math] лучше пронормировать, т.е. поделить все его компоненты на величину нормы. Для рассматриваемого примера получим
Согласно замечаниям, в качестве собственного значения [math]lambda_1[/math] матрицы можно взять не только отношение
а также их среднее арифметическое [math]fracapprox 6,!8581[/math] .
Пример 2.4. Найти максимальное по модулю собственное значение матрицы [math]A=begin2&-1&1\ -1&2&-1\ 0&0&3 end[/math] и соответствующий собственный вектор.
1. Зададим начальное приближение [math]X^= begin1&-1&1 end^T[/math] и [math]varepsilon=0,!0001[/math] .
Выполним расчеты согласно методике (табл. 10.11).
В результате получено собственное значение [math]lambda_1cong 3,!00003[/math] и собственный вектор [math]X^1= begin 88573&-88573&1end^T[/math] или после нормировки
Метод вращений для нахождения собственных значений
Метод используется для решения полной проблемы собственных значений симметрической матрицы и основан на преобразовании подобия исходной матрицы [math]Ainmathbb^[/math] с помощью ортогональной матрицы [math]H[/math] .
Напомним, что две матрицы [math]A[/math] и [math]A^[/math] называются подобными ( [math]Asim A^[/math] или [math]A^sim A[/math] ), если [math]A^=H^AH[/math] или [math]A=HA^H^[/math] , где [math]H[/math] — невырожденная матрица.
В методе вращений в качестве [math]H[/math] берется ортогональная матрица, такая, что [math]HH^=H^H=E[/math] , т.е. [math]H^=H^[/math] . В силу свойства ортогонального преобразования евклидова норма исходной матрицы [math]A[/math] не меняется. Для преобразованной матрицы [math]A^[/math] сохраняется ее след и собственные значения [math]lambda_icolon[/math]
[math]operatorname
При реализации метода вращений преобразование подобия применяется к исходной матрице [math]A[/math] многократно:
Формула (2.6) определяет итерационный процесс, где начальное приближение [math]A^=A[/math] . На k-й итерации для некоторого выбираемого при решении задачи недиагонального элемента [math]a_^,
ine j[/math] , определяется ортогональная матрица [math]H^[/math] , приводящая этот элемент [math]a_^[/math] (а также и [math]a_^[/math] ) к нулю. При этом на каждой итерации в качестве [math]a_^[/math] выбирается наибольший по модулю. Матрица [math]H^[/math] называемая матрицей вращения Якоби, зависит от угла [math]varphi^[/math] и имеет вид
В данной ортогональной матрице элементы на главной диагонали единичные, кроме [math]h_^= cosvarphi^[/math] и [math]h_^=cosvarphi^[/math] , а остальные элементы нулевые, за исключением [math]h_^=-sinvarphi^[/math] , [math]h_^=sinvarphi^[/math] ( [math]h_[/math] -элементы матрицы [math]H[/math] ).
Угол поворота [math]varphi^[/math] определяется по формуле
где [math]|2varphi^|leqslant frac,
i ( [math]a_[/math] выбирается в верхней треугольной наддиагональной части матрицы [math]A[/math] ).
В процессе итераций сумма квадратов всех недиагональных элементов [math]sigms(A^)[/math] при возрастании [math]k[/math] уменьшается, так что [math]sigms(A^) . Однако элементы [math]a_^[/math] приведенные к нулю на k-й итерации, на последующей итерации немного возрастают. При [math]ktoinfty[/math] получается монотонно убывающая ограниченная снизу нулем последовательность sigma(A^)> ldots> sigma(A^)>ldots»>[math]sigma(A^)> sigma(A^)> ldots> sigma(A^)>ldots[/math] . Поэтому [math]sigma(A^)to0[/math] при [math]ktoinfty[/math] . Это и означает сходимость метода. При этом [math]A^to Lambda= operatorname(lambda_1,ldots,lambda_n)[/math] .
Замечание. В двумерном пространстве с введенной в нем системой координат [math]Oxy[/math] с ортонормированным базисом [math]<vec,vec>[/math] матрица вращения легко получается из рис. 2.1, где система координат [math]Ox’y'[/math] повернута на угол [math]varphicolon[/math]
Таким образом, для компонент [math]vec,’,, vec,'[/math] будем иметь [math]bigl(vec,’,vec,’bigr)= bigl(vec,vecbigr)cdot! begin cos varphi&-sin varphi\ sin varphi& cos varphiend[/math] . Отсюда следует, что в двумерном пространстве матрица вращения имеет вид [math]H= begin cos varphi&-sin varphi\ sin varphi& cos varphiend[/math] . Отметим, что при [math]n=2[/math] для решения задачи требуется одна итерация.
Алгоритм метода вращений
1. Положить [math]k=0,
A^=A[/math] и задать 0″>[math]varepsilon>0[/math] .
2. Выделить в верхней треугольной наддиагональной части матрицы [math]A^[/math] максимальный по модулю элемент [math]a_^,
Если [math]|a_^|leqslant varepsilon[/math] для всех [math]ine j[/math] , процесс завершить. Собственные значения определяются по формуле [math]lambda_i(A^)=a_^,
Собственные векторы [math]X^i[/math] находятся как i-e столбцы матрицы, получающейся в результате перемножения:
Если varepsilon»>[math]bigl|a_^bigr|>varepsilon[/math] , процесс продолжается.
3. Найти угол поворота по формуле [math]varphi^= frac operatorname frac<2a_^><a_^-a_^>[/math] .
4. Составить матрицу вращения [math]H^[/math] .
5. Вычислить очередное приближение [math]A^= bigl(H^bigr)^T A^ H^[/math] .Положить [math]k=k+1[/math] и перейти к пункту 2.
1. Используя обозначение [math]overline
_k= frac<2a_^><a_^-a_^>[/math] , можно в пункте 3 алгоритма вычислять элементы матрицы вращения по формулам
2. Контроль правильности выполнения действий по каждому повороту осуществляется путем проверки сохранения следа преобразуемой матрицы.
3. При [math]n=2[/math] для решения задачи требуется одна итерация.
Пример 2.5. Для матрицы [math]A=begin 2&1\1&3 end[/math] методом вращений найти собственные значения и собственные векторы.
1. Положим [math]k=0,
2°. Выше главной диагонали имеется только один элемент [math]a_=a_=1[/math] .
3°. Находим угол поворота матрицы по формуле (2.7), используя в расчетах 11 цифр после запятой в соответствии с заданной точностью:
4°. Сформируем матрицу вращения:
5°. Выполним первую итерацию:
Очевидно, след матрицы с заданной точностью сохраняется, т.е. [math]sum_^a_^= sum_^a_^=5[/math] . Положим [math]k=1[/math] и перейдем к пункту 2.
2. Максимальный по модулю наддиагональный элемент [math]|a_|= 4,!04620781325cdot10^ . Для решения задачи (подчеркнем, что [math]n=2[/math] ) с принятой точностью потребовалась одна итерация, полученную матрицу можно считать диагональной. Найдены следующие собственные значения и собственные векторы:
Пример 2.6. Найти собственные значения и собственные векторы матрицы [math]A=begin5&1&2\ 1&4&1\ 2&1&3 end[/math] .
1. Положим [math]k=0,
2°. Выделим максимальный по модулю элемент в наддиагональнои части: [math]a_^=2[/math] . Так как varepsilon=0,!001″>[math]a_=2> varepsilon=0,!001[/math] , то процесс продолжается.
3°. Находим угол поворота:
4°. Сформируем матрицу вращения: [math]H^= begin0,!85065&0&-0,!52573\ 0&1&0\ 0,!52573&0&0,!85065 end[/math] .
5°. Выполним первую итерацию: [math]A^= bigl(H^bigr)^T A^H^= begin 6,!236&1,!376&2,!33cdot10^\ 1,!376&4&0,!325\ 2,!33cdot10^&0,!325&1,!764 end[/math] . Положим [math]k=1[/math] и перейдем к пункту 2.
2(1). Максимальный по модулю наддиагональный элемент [math]a_^=1,!376[/math] . Так как varepsilon=0,!001″>[math]a_^> varepsilon=0,!001[/math] , процесс продолжается.
3(1). Найдем угол поворота:
4(1). Сформируем матрицу вращения: [math]H^= begin 0,!902937&-0,!429770&0\ 0,!429770&0,!902937&0\ 0&0&1 end[/math] .
5(1). Выполним вторую итерацию: [math]A^= bigl(H^bigr)^T A^H^= begin 6,!891& 2,!238cdot10^&0,!14\ 2,!238cdot10^& 3,!345&0,!293\ 0,!14&0,!293&1,!764 end[/math] . Положим [math]k=2[/math] и перейдем к пункту 2.
2(2). Максимальный по модулю наддиагональный элемент varepsilon=0,!001″>[math]a_^=0,!293> varepsilon=0,!001[/math] .
3(2). Найдем угол поворота:
4(2). Сформируем матрицу вращения [math]H^= begin1&0&0\ 0&0,!9842924& -0,!1765460\ 0& 0,!1765460& 0,!9842924end[/math] .
5(2). Выполним третью итерацию и положим [math]k=3[/math] и перейдем к пункту 2:
2(3). Максимальный по модулю наддиагональный элемент varepsilon»>[math]a_^= 0,!138>varepsilon[/math] .
3(3). Найдем угол поворота:
4(3). Сформируем матрицу вращения: [math]H^= begin 0,!999646&0&-0,!026611\ 0&1&0\ 0,!026611&0&0,!999646 end[/math] .
5(3). Выполним четвертую итерацию и положим [math]k=4[/math] и перейдем к пункту 2:
2(4). Так как varepsilon»>[math]a_^=0,!025>varepsilon[/math] , процесс повторяется
3(4). Найдем угол поворота
4(4). Сформируем матрицу вращения: [math]H^= begin 0,!9999744&-0,!0071483&0\ 0,!0071483&0,!9999744&0\ 0&0&1 end[/math] .
5(4). Выполним пятую итерацию и положим [math]k=5[/math] и перейдем к пункту 2:
2(5). Так как наибольший по модулю наддиагональный элемент удовлетворяет условию [math]bigl|-6,!649cdot10^bigr| , процесс завершается.
Собственные значения: [math]lambda_1cong a_^= 6,!895,,
lambda_3cong a_^=1,!707,,[/math] . Для нахождения собственных векторов вычислим
X^3=begin-0,!473\-0,!171\0,!864 end[/math] или после нормировки
Метод вращений Якоби численного р ешения задач на собственные значения и собственные векторы матриц
Вычисление собственных значений и собственных векторов
Собственным вектором линейного преобразования  называется такой ненулевой вектор
называется такой ненулевой вектор  , что для некоторого
, что для некоторого 
 (1)
(1)
Собственным значением линейного преобразования называется такое число , для которого существует собственный вектор, то есть уравнение  имеет ненулевое решение .
имеет ненулевое решение .
Упрощённо говоря, собственный вектор — любой ненулевой вектор x, который отображается оператором в коллинеарный  , а соответствующий скаляр
, а соответствующий скаляр  называется собственным значением оператора.
называется собственным значением оператора.
Классический способ нахождения собственных значений и собственных векторов известен и заключается в следующем: для однородной СЛАУ, полученной из (1)
ненулевые решения имеют место при
причем уравнение (3) называют характеристическим уравнением, а выражение в левой части — характеристическим многочленом.
Каким-либо способом находят решения λ1, λ2,…, λn алгебраического уравнения (3) n-й степени (предположим, что они вещественны и различны).
Решая однородную СЛАУ (3) для различных собственных значений λj где j =1,…,n ,
получаем линейно независимые собственные векторы , x j соответствующие собственным значениям λj.
Попарно различным собственным значениям соответствуют линейно независимые собственные векторы.
Метод вращений Якоби численного р ешения задач на собственные значения и собственные векторы матриц
Метод вращений Якоби применим только для симметрических матриц A nxn (A = A T ) и решает полную проблему собственных значений и собственных векторов таких матриц. Он основан на отыскании с помощью итерационных процедур матрицы U в преобразовании подобия Λ= U -1 AU, а поскольку для симметрических матриц A матрица преобразования подобия U является ортогональной (U -1 =U T ), то Λ =U T AU, где Λ — диагональная матрица с собственными значениями на главной диагонали
 .
.
Пусть дана симметрическая матрица A. Требуется для нее вычислить с определенной точностью  все собственные значения и соответствующие им собственные векторы. Алгоритм метода вращения следующий:
все собственные значения и соответствующие им собственные векторы. Алгоритм метода вращения следующий:
Пусть известна матрица А (k) на k–й итерации, при этом для k=0 A (0) = A.
1. Выбирается максимальный по модулю недиагональный элемент матрицы 

2. Ставится задача найти такую ортогональную матрицу U ( k ) , чтобы в результате преобразования подобия A ( k +1) =U ( k ) T A ( k ) U ( k ) произошло обнуление элемента  матрицы A ( k +1) .
матрицы A ( k +1) .
В качестве ортогональной матрицы выбирается матрица вращения, имеющая следующий вид:
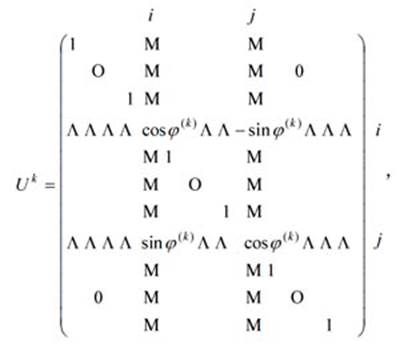
В матрице вращения на пересечении i-й строки и j-го столбца находится элемент
 , где
, где  — угол вращения, подлежащий определению.
— угол вращения, подлежащий определению.
Симметрично относительно главной диагонали ( j-я строка, i-й столбец) расположен элемент  Диагональные элементы
Диагональные элементы  и
и  равны соответственно
равны соответственно  ,
,  ; другие диагональные элементы
; другие диагональные элементы  ,
,  ; остальные элементы в матрице вращения равны нулю.
; остальные элементы в матрице вращения равны нулю.
Угол вращения  определяется из условия
определяется из условия  :
:
 ,
,
причем если  то
то  .
.
3. Строится матрица  в которой элемент
в которой элемент  .
.
В качестве критерия окончания итерационного процесса используется условие малости суммы квадратов внедиагональных элементов:
Если  , то итерационный процесс
, то итерационный процесс  продолжается.
продолжается.
Если  , то итерационный процесс останавливается, и в качестве искомых собственных значений принимаются
, то итерационный процесс останавливается, и в качестве искомых собственных значений принимаются 
Координатными столбцами собственных векторов матрицы A в единичном
базисе будут столбцы матрицы  т.е. ,
т.е. ,
 ),
),  ),
),  ) ,
) ,
причем эти собственные векторы будут ортогональны между собой, т.е.

Задание: Вычислить собственные значения и собственные векторы для симметричной матрицы.
Учебное пособие: Численное решение алгебраических проблем собственных значений
| Название: Численное решение алгебраических проблем собственных значений Раздел: Рефераты по математике Тип: учебное пособие Добавлен 10:50:53 26 февраля 2010 Похожие работы Просмотров: 1161 Комментариев: 18 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать |
 матрицы
матрицы  вещественны и удовлетворяют условию
вещественны и удовлетворяют условию (1)
(1) рассмотрим последовательность
рассмотрим последовательность (2)
(2) соответствующих собственным значениям
соответствующих собственным значениям  по собственным векторам:
по собственным векторам:
 , тогда, учитывая (2):
, тогда, учитывая (2):

 стремятся к нулю при k→ ∞ и вектор
стремятся к нулю при k→ ∞ и вектор  по направлению приближается к собственному вектору
по направлению приближается к собственному вектору  :
: при k→ ∞, (4)
при k→ ∞, (4) , то норма вектора
, то норма вектора  будет при этом стремиться к нулю, либо неограниченно возрастать, если
будет при этом стремиться к нулю, либо неограниченно возрастать, если  . На практике вычисляемые векторы нормируют на каждой итерации, а в качестве критерия окончания процесса используют условие:
. На практике вычисляемые векторы нормируют на каждой итерации, а в качестве критерия окончания процесса используют условие: .
. :
:  , k=0, ε – точность вычисления компонент собственного вектора
, k=0, ε – точность вычисления компонент собственного вектора
 :
: 

 ;
; =
=  ; в противном случае перейти к п. 2.
; в противном случае перейти к п. 2. , k=0, ε – точность вычисления максимального по модулю собственного значения,
, k=0, ε – точность вычисления максимального по модулю собственного значения,  — некоторый допуск (близость к нулю компонент вектора
— некоторый допуск (близость к нулю компонент вектора  ;
; для таких i, что
для таких i, что  , где
, где  , то собственным значением является
, то собственным значением является  , где j – число индексов, для которых выполняется условие
, где j – число индексов, для которых выполняется условие  . Если это отношение по модулю близко к 1, что характерно для многих практических задач, то сходимость будет медленной.
. Если это отношение по модулю близко к 1, что характерно для многих практических задач, то сходимость будет медленной. (а так всегда бывает в случае вещественной матрицы с доминирующей парой комплексно-сопряженных собственных значений), то итерационная последовательность (2) вообще не сходится.
(а так всегда бывает в случае вещественной матрицы с доминирующей парой комплексно-сопряженных собственных значений), то итерационная последовательность (2) вообще не сходится. ,
,  ,
, .
.