По работе у меня возникла необходимость переводить координаты объекта из углов Эйлера в кватернионы и обратно.
В ходе разбирательства пришлось прочитать несколько статей на Хабре, посвященных кватернионам и углам Эйлера, Википедию и просто методички и статьи разных ВУЗов. Для удобства приведу ссылки на статьи, с Хабра:
Формулы для пересчёта углов Эйлера в кватеринионы и обратно найти можно, но
Опишу коротко суть проблемы:
- Тело в трёхмерном пространстве имеет 6 степеней свободы: 3 координаты и 3 угла поворота.
- С координатами всё хорошо, например, если они (4,5,2), то это означает, что тело нужно сдвинуть относительно начала координат на +4 единицы по оси X, на +5 единиц по оси Y и на +2 единицы по оси Z. При этом порядок сдвига не важен. Можно сначала сдвинуть по X, потом по Y, потом по Z, а можно в другой последовательности. От перемены мест слагаемых сумма не меняется.
- С поворотами всё гораздо хуже. Иногда может сложиться ощущение, что для них тоже просто достаточно задать углы поворота вокруг трёх осей и этого будет достаточно (например: перевернуть предмет на 180 градусов вокруг оси X, потом на 180 градусов вокруг оси Y, а затем на 90 градусов вокруг оси Z — в каком порядке не поворачивай — результат будет один и тот же). Эта ловушка возникает оттого, что нам легче всего оперировать углами типа 90 или 180 градусов, а они-то как раз и представляют из себя очень частный случай. В общем случае порядок поворотов имеет значение.
А как же быть с законом, говорящим, что от перестановки мест слагаемых сумма не меняется? Дело в том, что композиция нескольких поворотов соответствует уже не сумме векторов (как в случае с операциями параллельного переноса), а произведению. И произведению не просто чисел, а специальных объектов — матриц поворота, например — на которые коммутативность «обычного» умножения не распространяется. В зависимости от порядка выбора осей поворота и от того, будут ли поворачиваться оси вместе с объектом или поворачиваться будет только объект, можно выделить 24 типа описаний поворотов. Очень часто углы поворота вокруг осей называются углами Эйлера. Иногда, в некоторых источниках эти углы называются углами Тэйт-Брайана либо углами Эйлера в зависимости от того, все три оси, вокруг которых делается вращение разные (углы Тэйт-Брайана), либо же первая и последняя оси — одна и та же. Также эти углы называют angles of extrinsic rotation — если оси неподвижны или angles of intrinsic rotation — если оси вращаются вместе с объектом.
Чтоб не запутаться, приведу все типы вращений здесь:
Тейт-Брайана, внутренние:
ZYXr; YZXr; XZYr; ZXYr; YXZr; XYZr.
Эйлера, внутренние:
XYXr; XZXr; YZYr; YXYr; ZXZr; ZYZr.
Тейт-Брайана, внешние:
ZYXs; YZXs; XZYs; ZXYs; YXZs; XYZs.
Эйлера, внешние:
XYXs; XZXs; YZYs; YXYs; ZXZs; ZYZs.
Внешние углы комплементарны внутренним, прочитанным задом наперёд, например: внешние углы Эйлера 10, 20, 30 градусов в формате XYXs это то же самое, что и внутренние углы Эйлера 30, 20, 10 градусов в формате XYXr.
Собственно, об этом уже было сказано много раз. Зачем же писать новую статью? Дело в том, что информации о том, как переводить из углов Эйлера в кватернион и обратно — не так уж и много. И в большинстве случаев описывается только 1 или 2, 3, 6 систем углов Эйлера. Но не все 24. И по аналогии вывести остальные (и не ошибиться) не очень-то и просто. Во время «откапывания истины» мне удалось найти несколько онлайн-конвертеров из углов в кватернионы и по тому, в каком направлении увеличивается их возможность по конвертации можно понять, сколько ещё вариантов осталось не охвачено:
quat.zachbennett.com — один тип углов
energid.com — один тип углов
onlineconversion.com — один тип углов
quaternions.online — три типа углов
andre-gaschler.com — шесть типов углов
Единственное место, где я смог найти описание преобразований для всех 24 типов углов — это книга «Graphics Gems IV». Репозитарий с исходниками от этой книги находится здесь: Исходники к книге Graphics Gems IV. Если говорить про код преобразования из углов Эйлера в кватернионы и обратно, то эти исходники в репозитарии находятся здесь: . /GraphicsGems/gemsiv/euler_angle. Но у них есть один недостаток: с целью сделать максимально общую функцию расчёта углов и кватернионов, автор очень сильно усложнил код. Т.е. код получился очень компактным, но плохо подходящим для перевода на другие языки или для оптимизации под конкретные случаи. Так как мне очень нужно было разобраться со всеми 24-мя случаями, то пришлось этот код немного поисследовать и развернуть его в набор простых случаев. Также я написал небольшие юнит-тесты и проверил, что мой код работает корректно. Т.к. эти юнит-тесты используют код, скомпилированный из исходников от книги Graphics Gems, то выкладывать их (юнит-тесты) я не стал.
Не буду приводить в тексте статьи свои исходники (они написаны на языке Octave). Дам лишь ссылку на репозитарий и прокомментирую его содержимое:
Обеих функций в Octave нет. В Matlab поддерживаются только 6 типов углов Эйлера на неподвижных осях. В моих реализациях поддерживаются все 24 типа. При этом типы с буквой r на конце (например, XYZr) означают, что оси вращаются вместе с объектом. Типы с буквой s на конце (например, XYZs) означают, что оси остаются неподвижными.
- Матрицы поворота, углы Эйлера и кватернионы (Rotation matrices, Euler angles and quaternions)
- Матрицы поворота и углы Эйлера
- Axis Angle представление вращения
- Кватернионы
- Основные операции над кватернионами
- Сложение, вычитание и умножение на скаляр.
- Норма и модуль
- Обратный кватернион или сопряжение ( conjugate )
- Инверсный (inverse) кватернион
- Тождественный кватернион
- Скалярное произведение
- Вращение 3d вектора
- Умножение кватернионов
- Конвертирование между кватернионом и Axis Angle представлением
- Конвертирование кватерниона в матрицу поворота
- Конвертирование матрицы поворота в кватернион
- Сферическое движение твердого тела в теоретической механике
- Вращение тела вокруг точки
- Углы Эйлера
- Мгновенная ось вращения
- Аксоиды при сферическом движении
- Формулы Эйлера
- Скорость и ускорение точки тела
Матрицы поворота, углы Эйлера и кватернионы (Rotation matrices, Euler angles and quaternions)
Объект обычно определяется в удобной для его описания локальной системе координат (ЛСК), а его положение в пространстве — в глобальной системе координат (ГСК).
В трёхмерном пространстве переход из одной СК в другую описывается в общем случае системой линейных уравнений:

Уравнения могут быть записаны через матрицы аффинных преобразований в однородных координатах одним из 2-х способов:

В ортогональных СК оси X, Y и Z взаимно перпендикулярны и расположены по правилу правой руки:

На рисунке справа большой палец определяет направление оси, остальные пальцы — положительное направление вращения относительно этой оси.
Все три вектора направлений есть единичными.

Ниже приводится единичная матрица для 2-х способов записи уравнений геометрических преобразований. Такая матрица не описывает ни перемещения, ни вращения. Оси ЛСК и ГСК совпадают.

Далее рассматривается матрица для второго способа матричной записи уравнений (матрица справа). Этот способ встречается в статьях значительно чаще.
При использовании матрицы вы можете игнорировать нижнюю строку. В ней всегда хранятся одни и те же значения 0, 0, 0, 1. Она добавлена для того, чтобы мы могли перемножать матрицы (напомню правило перемножения матриц и отмечу, что всегда можно перемножать квадратные матрицы). Подробнее см. Композиция матриц. Однородные координаты.
Остальные 12 значений определяют координатную систему. Первый столбец описывает компоненты направления оси X(1,0,0). Второй столбец задает направление оси Y(0,1,0), третий – оси Z (0,0,1). Последний столбец определяет положение начала системы координат (0,0,0).
Как будет выглядеть матрица Евклидового преобразования (преобразование движения) для задания ЛСК , с началом в точке (10,5,0) и повёрнутой на 45° вокруг оси Z глобальной СК, показано на рисунке.

Рассмотрим сначала ось X. Если новая система координат повернута на 45° вокруг оси z, значит и ось x повернута относительно базовой оси X на 45° в положительном направлении отсчета углов. Таким образом, ось X направлена вдоль вектора (1, 1, 0), но поскольку вектор системы координат должен быть единичным, то результат должен выглядеть так (0.707, 0.707, 0). Соответственно, ось Y имеет отрицательную компоненту по X и положительную по Y и будет выглядеть следующим образом (-0.707, 0.707, 0). Ось Z направления не меняет (0, 0, 1). Наконец, в четвертом столбце вписываются координаты точки начала системы координат (10, 5, 0).
Частным случаем матриц геометрических преобразований есть матрицы поворота ЛСК относительно базовых осей ГСК. Вектора осей ЛСК здесь выражены через синусы и косинусы углов вращения относительно оси, перпендикулярной к плоскости вращения.

От матрицы преобразований размером 4*4 можно перейти непосредственно к матрице поворота 3*3, убрав нижний ряд и правый столбец. При этом, система линейных уравнений записывается без свободных элементов (лямда, мю, ню), которые определяют перемещение вдоль осей координат.
Путем перемножения базовых матриц можно получать комбинированные вращения. Ниже рассмотрены возможности комбинировать вращениями через матрицы поворота на примерах работы с углами Эйлера.
Матрицы поворота и углы Эйлера


От выбора осей и последовательности вращения зависит конечный результат. На рисунках отображена следующая последовательность вращения относительно осей ЛСК:
- оси Z (угол alpha);
- оси X (угол beta);
- оси Z (угол gamma).

Получил от читателя этой статьи вопрос: «Как понять, из каких углов поворота вокруг осей X,Y,Z можно получить текущее положение объекта, когда в качестве задания мы уже имеем повернутый объект, а нужно вывести его в это положение, последовательно повернув его из какого-то начального положения до полного совмещения с заданным?»
Мой ответ: «Если я правильно понял вопрос, то Вас интересует, как от начального положения перейти к заданному положению объекта, используя для этого элементарные базовые аффинные преобразования.
Начну с аналогии. Это как в шахматах. Мы знаем как ходит конь. Необходимо переместить его в результате многоходовки в нужную клетку на доске — при условии, что это возможно.
Подробно эта проблематика рассмотрена в статье Преобразование координат при калибровке роботов.
Умение правильно выбирать последовательность элементарных геометрических преобразований помогает в решении множества других задач (см. Примеры геометрических преобразований).»
Можно получить результирующую матрицу, которая определяет положение ГСК относительно ЛСК. Для этого необходимо перемножить матрицы с отрицательными углами в последовательности выполнения поворотов:


Почему знак угла поворота меняется на противоположный? Объяснение этому простое. Движение относительно. Абстрагируемся и представим, что ГСК меняет положение относительно неподвижной ЛСК. При этом направление вращения меняется на противоположное.
Перемножение матриц даст следующий результат:

Результирующую матрицу можно использовать для пересчета координат из ГСК в ЛСК:

Для пересчета координат из ЛСК в ГСК используется результирующая обратная матрица.

В обратной матрице последовательность поворота и знаки углов меняются на противоположные (в рассматриваемом примере снова на положительные) по сравнению с матрицей определения положения ГСК относительно ЛСК.


Перемножение матриц даст следующий результат:

Выше был рассмотрен случай определения углов Эйлера через вращение относительно осей ЛСК. То же взаимное положение СК можно получить, выполняя вращение относительно осей ГСК:
- оси z (угол (gamma+pi/2));
- оси y (угол угол beta);
- оси z (угол (-alpha)).

Определение углов Эйлера через вращение относительно осей ГСК позволяет также просто получить зависимости для пересчета координат из ЛСК в ГСК через перемножение матриц поворота.

В рамках рассматриваемой задачи вместо угла gamma в матрицe Az используем угол gamma+pi/2.
Также легко можно перейти к зависимостям для пересчета координат из ГСК в ЛСК.

Обратная матрица получается перемножением обратных матриц в обратном порядке по сравнению с прямым преобразованием. При этом каждая из обратных матриц вращения может быть получена заменой знака угла на противоположный.
Детально с теоретическими основами аффинных преобразований (включая и вращение) можно ознакомиться в статье Геометрические преобразования в графических приложениях
Примеры преобразований рассмотрены в статьях:
Axis Angle представление вращения
Выбрав подходящую ось (англ. rotation axis) и угол (англ. rotation angle) можно задать любую ориентацию объекта.

Обычно хранят ось вращения в виде единичного вектора и угол поворота вокруг этой оси в радианах или градусах.
q = [ x, y, z, w ] = [ v, w ]
В некоторых случаях удобно хранить угол вращения и ось в одном векторе. Направление вектора при этом совпадает с направлением оси вращения, а его длина равна углу поворота:
q = [ x, y, z]; w=sqrt (x*x +y*y +z*z)
В физике, таким образом хранят угловую скорость. Направление вектора совпадает с направлением оси вращения, а длина вектора равна скорости (в радианах в секунду).
Можно описать рассмотренные выше углы Эйлера через Axis Angle представление в 3 этапа:
q1 = [ 0, 0, 1, alpha]; q2 = [ 1, 0, 0, beta]; q3 = [ 0, 0, 1, gamma ]
Здесь каждое вращение выполняется относительно осей текущего положения ЛСК. Такое преобразование равнозначно рассмотренному выше преобразованию через матрицы поворота:
Возникает вопрос, а можно ли 3 этапа Axis Angle представления объединить в одно, подобно матрицам поворота? Попробуем решить геометрическую задачу по определению координат последнего вектора вращения в последовательности преобразований через Axis Angle представления:
q = [ x, y, z, gamma ]

Есть ли представление q= [x, y, z, gamma] композицией последовательности из 3-х этапов преобразований? Нет! Координаты x, y, z определяют всего лишь положение оси Z ЛСК после первого и второго этапов преобразований:

При этом ось Z, отнюдь, не есть вектор вращения для Axis Angle представления, которое могло бы заменить рассмотренные 3-х этапа преобразований.
Еще раз сформулирую задачу, которая математически пока не решена: «Необходимо найти значение угла (rotation angle) и положение оси (rotation axis), вращением относительно которой на этот угол можно заменить комбинацию из 3-х поворотов Эйлера вокруг осей координат».
К сожалению, никакие операции (типа объединения нескольких преобразований в одно) с Axis Angle представлениями нельзя выполнить. Не будем расстраиваться. Это можно сделать через кватернионы, которые также определяют вращение через параметры оси и угол.
Кватернионы
Кватернион (как это и видно по названию) представляет собой набор из четырёх параметров, которые определяют вектор и угол вращения вокруг этого вектора. По сути такое определение ничем не отличается от Axis Angle представления вращения. Отличия лишь в способе представления. Как же хранят вращение в кватернионе?
q = [ V*sin(alpha/2), cos(alpha/2) ]
В кватернионе параметры единичного вектора умножается на синус половины угла поворота. Четвертый компонент — косинус половины угла поворота.
Таблица с примерами значений кватернионов:

Представление вращения кватернионом кажется необычным по сравнению с Axis Angle представлением. Почему параметры вектора умножаются на синус половины угла вращения, четвертый параметр — косинус половины угла вращения, а не просто угол?
Откуда получено такое необычное представление кватерниона детально можно ознакомиться в статье Доступно о кватернионах и их преимуществах. Хотя программисту не обязательно знать эти детали, точно также как и знать, каким образом получены матрицы преобразования пространства. Достаточно лишь знать основные операции с кватернионами, их смысл и правила применения.
Основные операции над кватернионами
Кватернион удобно рассматривать как 4d вектор, и некоторые операции с ним выполняются как над векторами.
Сложение, вычитание и умножение на скаляр.
Смысл операции сложения можно описать как «смесь» вращений, т.е. мы получим вращение, которое находится между q и q’.
Что-то подобное сложению кватернионов выполнялось при неудачной попытке объединить 3 этапа Axis Angle представления.
Умножение на скаляр на вращении не отражается. Кватернион, умноженный на скаляр, представляет то же самое вращение, кроме случая умножения на 0. При умножении на 0 мы получим «неопределенное» вращение.
Пример сложения 2-х кватернионов:
Норма и модуль
Следует различать (а путают их часто) эти две операции:
Модуль (magnitude), или как иногда говорят «длина» кватерниона:
Через модуль кватернион можно нормализовать. Нормализация кватерниона — это приведение к длине = 1 (так же как и в векторах):
Обратный кватернион или сопряжение ( conjugate )
Обратный кватернион задает вращение, обратное данному. Чтобы получить обратный кватернион достаточно развернуть вектор оси в другую сторону и при необходимости нормализовать кватернион.
Например, если разворот вокруг оси Y на 90 градусов = (w=0,707; x = 0; y = 0,707; z=0), то обратный = (w=0,707; x = 0; y = -0,707; z=0).
Казалось бы, можно инвертировать только компоненту W, но при поворотах на 180 кватернион представляется как (w=1; x = 0; y = 0; z=0), то есть, у него длина вектора оси = 0.
Фрагмент программной реализации:
Инверсный (inverse) кватернион
Существует такой кватернион, при умножении на который произведение дает нулевое вращение и соответствующее тождественному кватерниону (identity quaternion), и определяется как:
Тождественный кватернион
Записывается как q[0, 0, 0, 1]. Он описывает нулевой поворот (по аналогии с единичной матрицей), и не изменяет другой кватернион при умножении.
Скалярное произведение
Скалярное произведение полезно тем, что дает косинус половины угла между двумя кватернионами, умноженный на их длину. Соответственно, скалярное произведение двух единичных кватернионов даст косинус половины угла между двумя ориентациями. Угол между кватернионами — это угол поворота из q в q’ (по кратчайшей дуге).
Вращение 3d вектора
Вращение 3d вектора v кватернионом q определяется как
причем вектор конвертируется в кватернион как
и кватернион обратно в вектор как
Умножение кватернионов
Одна из самых полезных операций, она аналогична умножению двух матриц поворота. Итоговый кватернион представляет собой комбинацию вращений — сначала объект повернули на q, а затем на q’ (если смотреть из глобальной системы координат).
Примеры векторного и скалярного перемножения 2-х векторов


Пример умножения 2-х кватернионов:
Конвертирование между кватернионом и Axis Angle представлением

В разделе Axis Angle представление вращения была сделана неудачная попытка объединить 3 Axis Angle представления в одно . Это можно сделать опосредовано. Сначала Axis Angle представления конвертируются в кватернионы, затем кватернионы перемножаются и результат конвертируется в Axis Angle представление.
Пример конвертирования произведения 2-х кватернионов в Axis Angle представление:
Фрагмент программы на C:
Конвертирование кватерниона в матрицу поворота
Матрица поворота выражается через компоненты кватерниона следующим способом:
 где
где

Проверим формулы конвертирования на примере конвертирования произведения 2-х кватернионов в матрицу поворотов:
Определяем элемент матрицы m[0][0] через параметры кватерниона:

Соответствующее произведению кватернионов (q1 и q2) произведение матриц поворотов было получено ранее (см. Матрицы поворота и углы Эйлера):

Как видим, результат m[0][0], полученный через конвертирование, совпал с значением в матрице поворота.
Фрагмент программного кода на С для конвертирования кватерниона в матрицу поворота:
При конвертировании используется только умножения и сложения, что является несомненным преимуществом на современных процессорах.
Часто для задания вращений используют только кватернионы единичной длины, но это не обязательно и иногда даже не эффективно. Разница между конвертированием единичного и неединичного кватернионов составляет около 6-ти умножений и 3-х сложений, зато избавит во многих случаях от необходимости нормировать (приводить длину к 1) кватернион. Если кусок кода критичен по скорости и вы пользуетесь только кватернионами единичной длины тогда можно воспользоваться фактом что норма его равна 1.
Конвертирование матрицы поворота в кватернион

Конвертирование матрицы в кватернион выполняется не менее эффективно, чем кватерниона в матрицу, но в итоге мы получим кватернион неединичной длины. Его можно нормализовать.
Фрагмент программного кода конвертирования матрицы поворота в кватернион:
Сферическое движение твердого тела в теоретической механике
Содержание:
Сферическое движение твердого тела:
Сферическим называют такое движение твердого тела, при котором точки тела описывают траектории, лежащие на сферах с одним и тем же неподвижным центром
Вращение тела вокруг точки
Пусть во время движения тела одна из его точек остается неподвижной. Тогда всякая другая точка тела может двигаться только по поверхности сферы, описанной вокруг неподвижной точки радиусом, равным расстоянию этой точки от неподвижной. Такое движение называют сферическим движением тела, или вращением вокруг неподвижной точки.
Положение тела, имеющего неподвижную точку, можно определить тремя независимыми углами
Углы Эйлера
Чтобы определить положение тела, имеющего неподвижную точку, построим две системы координатных осей с общим началом в этой точке О: основную xOyz и подвижную x’Oy’z’, неизменно связанную с движущимся телом (рис. 107). Три оси подвижной системы составляют 9 углов с тремя осями основной, но для определения положения тела, имеющего неподвижную точку, нет необходимости знать все 9 направляющих косинусов, так как они связаны известными из аналитической геометрии соотношениями, и независимых величин остается только три.
Положение тела, имеющего неподвижную точку, можно определить тремя независимыми углами. Эти углы обычно называют эйлеровыми.1 Ознакомимся с углами, предложенными Эйлером и применяемыми в астрономии, в гироскопии и во многих других науках.
Линией узлов называют линию ON пересечения плоскостей xОy и х’Оу’ основной и подвижной систем. Первый угол — угол прецессии ψ—лежит в плоскости хОу между неподвижной осью Ox и линией узлов. Его измеряют от оси Ox к оси ON против хода часов, если смотреть с оси Oz.
Второй—угол собственного вращения φ—лежит в плоскости х’Оу’ и его отмеривают от линии узлов до оси Ox’ против хода часовой стрелки, если смотреть с оси Oz’. Третий — угол
Во время движения тела эти углы изменяются. Чтобы задать уравнение сферического движения, надо представить их как некоторые непрерывные однозначные функции времени:

Предельное положение такой оси, вокруг которой следует повернуть твердое тело на бесконечно малый угол, чтобы перевести его из одного положения в другое, бесконечно близкое первому, называют мгновенной осью вращения
Мгновенная ось вращения
Положение тела в пространстве можно определить различными способами. В частности, для этого можно задать положение трех его точек. Применим этот способ для изучения сферического движения тела. За одну из этих точек примем неподвижную точку О (рис. 108, а), а две другие, А и В, выберем произвольно, но с условием, чтобы их скорости не были параллельны между собой.
Рассмотрим сначала точку А. Проведем прямую через точку А и неподвижную точку О. Согласно основной теореме кинематики твердого тела (77) проекции скоростей точек А и Q на АО должны быть равны. Но скорость точки О, а потому и ее проекция равны нулю. Скорость точки А нулю не равна, но проекция ее на ЛО должна равняться нулю, следовательно, скорость точки А перпендикулярна к АО. Если мы проведем через точки А и О плоскость (рис. 108, б) перпендикулярно к скорости точки А, то по той же теореме скорости точек этой плоскости должны быть перпендикулярны к прямым, соединяющим эти точки с неподвижной точкой О, т. е. перпендикулярны плоскости.
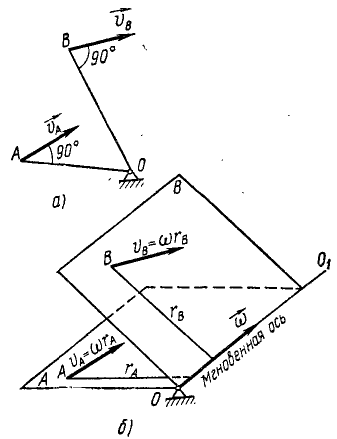
Рис. 108
Рассмотрим теперь точку В и повторим те же рассуждения. Если мы проведем через точки В и О плоскость В перпендикулярно к скорости точки В, то скорости точек этой плоскости должны быть перпендикулярны к плоскости В. Точки, лежащие на линии OO1 пересечения плоскостей А и В, должны иметь скорости, перпендикулярные сразу к обеим пересекающимся плоскостям, что невозможно. Следовательно, скорости точек этой прямой OO1 в данное мгновение равны нулю. Мы пришли к убеждению, что при движении тела с одной неподвижной точкой через эту точку всегда можно провести ось, скорости точек которой в данное мгновение равны нулю. Эту ось называют мгновенной осью вращения.
Если в движущемся теле существует ось, скорости точек которой в данное мгновение равны нулю, то скорости других его точек должны быть пропорциональны их расстояниям от оси. Таким образом, картина распределения скоростей в теле с одной неподвижной точкой оказалась на данное мгновение такой же, как и в теле, вращающемся вокруг неподвижной оси.
При изучении вращения тела вокруг неподвижной оси мы условились о направлении вектора угловой скорости. То же условие сохраняется на сферическое движение, где вектор угловой скорости ω направлен от неподвижной точки О по мгновенной оси вращения в такую сторону, чтобы вращение тела представлялось происходящим против хода часов, если смотреть с конца вектора ω, к точке О. Этот вектор можно переносить вдоль оси вращения, но нельзя перемещать параллельно оси. Глубокое отличие вектора угловой скорости при сферическом движении заключается в том, что он постоянно меняет свое направление.
В связи с этим другое толкование принимает и угловое ускорение. Изображая угловое ускорение тела при вращении вокруг оси вектором, мы направляли его в ту или иную сторону по вектору угловой скорости. При вращении тела относительно неподвижной точки дело обстоит иначе: направление угловой скорости меняется. Мы будем называть вектором углового ускорения тела вектор, характеризующий изменение в данное мгновение величины и направления угловой скорости тела
 (97)
(97)
Направление этого вектора, вообще говоря, не совпадает с мгновенной осью вращения. Пусть, например, угловая скорость тела, имеющего неподвижную точку О (рис. 109) и не показанного на чертеже, в данное мгновение равна  , а через малый промежуток времени Δt станет
, а через малый промежуток времени Δt станет  Разделив
Разделив  на Δt, мы получим вектор среднего углового ускорения тела. Если мы будем уменьшать промежуток времени Δt, оставляя неизменным его начало, то вектор среднего углового ускорения тела будет стремиться к своему предельному значению — вектору углового ускорения тела. Этот вектор
на Δt, мы получим вектор среднего углового ускорения тела. Если мы будем уменьшать промежуток времени Δt, оставляя неизменным его начало, то вектор среднего углового ускорения тела будет стремиться к своему предельному значению — вектору углового ускорения тела. Этот вектор  проходит через неподвижную точку О и параллелен касательной к годографу вектора
проходит через неподвижную точку О и параллелен касательной к годографу вектора .
.
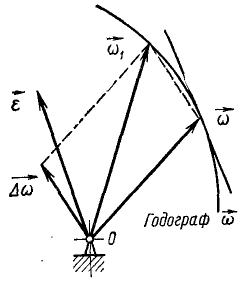
Рис. 109
При сферическом движении тела подвижный аксоид катится без скольжения по неподвижному
Аксоиды при сферическом движении
Положение мгновенной оси в теле, имеющем одну неподвижную точку, непрерывно меняется. Но в каждое мгновение ось имеет вполне определенное положение и всегда проходит через неподвижную точку О. Геометрическое место мгновенных осей вращения, проведенных в теле, представляет собой некоторую коническую поверхность и называется подвижным аксои-дом. Положение мгновенной оси вращения можно отметить и относительно неподвижных координат. Их геометрическое место относительно неподвижных координат, называемое неподвижным аксоидом, также является конической поверхностью с вершиной в той же неподвижной точке О. Оба конуса соприкасаются по мгновенной оси вращения. Сферическое движение тела можно представить как качение без скольжения подвижного аксоида по неподвижному.
Зависимость между проекциями скоростей точек тела, их координатами и проекциями угловой скорости выражается формулами Эйлера
Формулы Эйлера
Как было только что показано, скорость каждой точки K тела, имеющего неподвижную точку О, перпендикулярна к прямой КО и пропорциональна расстоянию KО sin α точки К от мгновенной оси вращения (рис. 110), т. е.
Таким образом, при сферическом движении, как и при вращательном, скорость всякой точки тела можно рассматривать как момент вектора угловой скорости тела относительно этой точки. Проведем из какой-либо точки К тела вектор  в неподвижную точку О, принятую нами за начало отсчета. Этот вектор равен по модулю, но направлен противоположно радиусу-вектору
в неподвижную точку О, принятую нами за начало отсчета. Этот вектор равен по модулю, но направлен противоположно радиусу-вектору  точки K относительно начала отсчета О. Момент вектора угловой скорости относительно точки K представим векторным произведением и запишем в виде определителя третьего порядка, как это мы делали (см. 17 и 17′) в статике при определении момента силы:
точки K относительно начала отсчета О. Момент вектора угловой скорости относительно точки K представим векторным произведением и запишем в виде определителя третьего порядка, как это мы делали (см. 17 и 17′) в статике при определении момента силы: 
Раскладывая этот определитель по элементам первой строки:

раскладывая скорость точки по осям координат:
и сравнивая оба равенства, мы можем выразить проекции скорости точки через проекции угловой скорости тела и координаты точки:
 (98)
(98)
Эти соотношения, очень напоминающие знакомые нам выражения (23) момента силы относительно оси, отличаются от них не только тем, что вектор силы заменен вектором угловой скорости, но и знаками. Круговой заменой букв в любой из трех формул (98) можно получить две остальные. Эти формулы имеют применение при определении проекций скоростей точек тела, совершающего сферическое движение или вращение вокруг неподвижной оси. В частном случае, если тело вращается вокруг оси Oz, то проекции угловой скорости ωx = ωy = 0, a ωz=ω, мы получаем формулы (89).
Задача №1
Тело движется вокруг неподвижной точки — начала координат. В некоторое мгновение угловая скорость его изображается вектором, проекции которого на координатные оси равны  ,
,  ,
,  . Найти скорость точки К тела, определяемой координатами
. Найти скорость точки К тела, определяемой координатами  ,
,  ,
, .
.
Решение. Подставляя данные в формулы Эйлера, получим
Ответ. υ = 0. В этот момент времени мгновенная ось проходит через точки О и К.
Задача №2
Ось OA мельничного бегуна (рис. 111) вращается равномерно вокруг вертикальной оси с угловой скоростью ω1. Длина оси OA=l, радиус бегуна равен r. Пренебрегая скольжением бегуна, определить вектор его угловой скорости.
Решение. Движение бегуна можно рассматривать как вращение около неподвижной точки О. Бегун катится без скольжения, поэтому скорость точки C соприкосновения его с горизонтальной плоскостью равна нулю, и, следовательно, в каждое мгновение ось, проходящая через точки О и С, есть мгновенная ось вращения. Центр бегуна (точка А) движется вокруг вертикальной оси, проходящей через О, с постоянной по величине скоростью
Но точка А принадлежит бегуну, а потому ее скорость в то же время является вращательной скоростью вокруг мгновенной оси вращения ОС. Опуская из А перпендикуляр на мгновенную ось, получаем

где ω—угловая скорость бегуна, а а — угол AОС. Из двух выражений υA находим ответ.
Ответ. 
Ускорение всякой точки тела, совершающего сферическое движение, состоит из вращательного и осестремительного ускорений
Чтобы получить ускорение какой-либо точки К тела, находящегося в сферическом движении, продифференцируем по времени вектор ее скорости 

 (99)
(99)
Таким образом, ускорение каждой точки К тела, имеющего одну неподвижную точку О, состоит из векторной суммы двух ускорений: вращательного ускорения  и осестремительного ускорения
и осестремительного ускорения  . В общем случае оба эти ускорения не перпендикулярны друг другу, что необходимо учесть при их суммировании (рис. 112, а).
. В общем случае оба эти ускорения не перпендикулярны друг другу, что необходимо учесть при их суммировании (рис. 112, а).
 (99 / )
(99 / )
Эту формулу называют формулой Ривальса.
Чтобы лучше уяснить чему равны и как направлены эти ускорения, обратимся к чертежу.
Вращательное ускорение (рис. 112, б) выражается векторным произведением углового ускорения  и радиуса вектора
и радиуса вектора  Следовательно, оно направлено перпендикулярно плоскости, образованной этими векторами, и по модулю равно
Следовательно, оно направлено перпендикулярно плоскости, образованной этими векторами, и по модулю равно

где h1—длина перпендикуляра, опущенного из точки К на прямую, по которой направлено угловое ускорение ε. Из формулы (100) в частности следует, что эта прямая обязательно должна проходить через неподвижную точку О, потому что в противном случае точка О имела бы неравное нулю вращательное ускорение, т. е. стала бы подвижной.
Осестремительное ускорение по модулю равно
но этот синус равен единице, так как векторы угловой и вращательной скорости взаимно перпендикулярны. Модуль же вектора вращательной скорости υ = ωh, где h—длина перпендикуляра, опущенного из точки К на мгновенную ось вращения, а потому
Направлено осестремительное ускорение перпендикулярно векторам угловой скорости тела и вращательной скорости точки К, т. е. по прямой h от точки К к мгновенной оси вращения.
Задача №3
Найти скорость и ускорение точки В конического катка, равномерно катящегося без скольжения по горизонтальной конической кольцевой опоре (рис. 113). Диаметр катка BC = 30 см, OA = 20 см, скорость центра катка υА = 40 см/ceκ и направлена перпендикулярно плоскости чертежа на читателя.
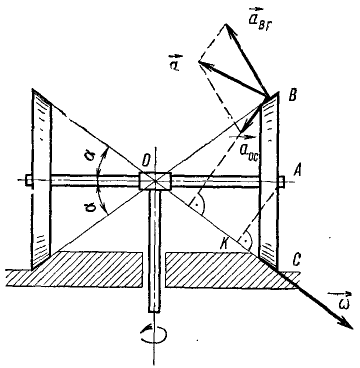
Рис. 113
Решение. Мгновенная ось проходит через неподвижную точку О и точку С, скорость которой в данное мгновение равна нулю, потому что каток катится без скольжения. Вектор угловой скорости ω направлен по мгновенной оси. Модуль его определим, разделив скорость точки А на расстояние АК от мгновенной оси. Из треугольника OAC находим OC 2 = OA 2 + АС 2 = 625. Тогда

Имея эти данные, находим угловую скорость:
Чтобы найти скорость точки В, надо угловую скорость помножить на расстояние точки В от мгновенной оси h = OB sin 2α =25 . 2 . 0,6 . 0,8 =24 см. Скорость точки В перпендикулярна плоскости чертежа, направлена на читателя и по модулю равна 79,2 см/сек.
Найдем теперь вектор углового ускорения. Каток катится равномерно, величина угловой скорости не изменяется, но меняется ее направление, и конец вектора угловой скорости описывает годограф—окружность радиуса ω sin . Угловая скорость ω1, с которой поворачивается вектор угловой скорости ω, равна угловой скорости, с которой поворачивается ось OA во время движения катка:
. Угловая скорость ω1, с которой поворачивается вектор угловой скорости ω, равна угловой скорости, с которой поворачивается ось OA во время движения катка:
Вектор углового ускорения равен скорости годографа вектора угловой скорости. Он направлен перпендикулярно плоскости чертежа на читателя, но приложен в неподвижной точке О:

Чтобы определить вращательное ускорение точки В, надо помножить угловое ускорение в на длину перпендикуляра h1 -BO = 25 см:

Направлен вектор вращательного ускорения перпендикулярно вектору углового ускорения и плечу ВО и в такую сторону, чтобы вектор е указывал против хода часовой стрелки, если смотреть с конца вектора авр . Следовательно, вектор авр лежит в плоскости BOC и перпендикулярен ВО.
Осестремительное ускорение по модулю равно произведению квадрата модуля угловой скорости на длину перпендикуляра h, опущенного из точки В на мгновенную ось, и направлено к оси:
αoc = 3,3 2 ∙24 = 261 см/сек.
Угол между векторами вращательного и осестремительного ускорений равен 2α. Полное ускорение точки В определим, применив теорему косинусов 
Ответ: υB= 79 см/сек, ав = 257 см/сек 2 .
Скорость и ускорение точки тела
Постановка Задачи. Твердое тело совершает сферическое движение по закону, заданному в углах Эйлера  Найти скорость и ускорение точки, положение которой дано относительно подвижных осей координат.
Найти скорость и ускорение точки, положение которой дано относительно подвижных осей координат.
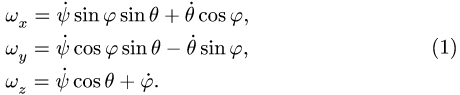
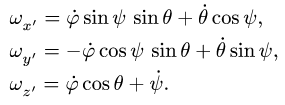
1. Воспользуемся кинематическими уравнениями Эйлера для определения проекций угловой скорости на подвижные оси координат
2. Находим проекции скорости  на подвижные оси относительно которых задан радиус-вектор точки
на подвижные оси относительно которых задан радиус-вектор точки 
3. Вычисляем модуль скорости 
4. Дифференцируя по времени t проекции угловой скорости, получаем компоненты углового ускорения  в подвижных осях.
в подвижных осях.
5. Ускорение точки представляем в виде векторной суммы

где  — вращательное, a
— вращательное, a  — осестремительное ускорение.
— осестремительное ускорение.
6. Находим модуль ускорения 
Пример. Твердое тело совершает сферическое движение по закону, заданному в углах Эйлера  При t = 1 с найти скорость и ускорение точки, положение которой относительно подвижных координат задано координатами
При t = 1 с найти скорость и ускорение точки, положение которой относительно подвижных координат задано координатами
Углы  даны в рад. Решение
даны в рад. Решение
1. Зная зависимости угла прецессии  угла нутации
угла нутации  и собственного вращения
и собственного вращения  от времени, воспользуемся кинематическими уравнениями Эйлера (1) для определения проекций угловой скорости на подвижные оси координат. Подставляя в (1) заданные функции, получаем
от времени, воспользуемся кинематическими уравнениями Эйлера (1) для определения проекций угловой скорости на подвижные оси координат. Подставляя в (1) заданные функции, получаем
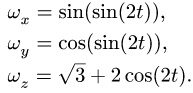
При t = 1 вычисляем

Модуль угловой скорости тела

2. Вычисляем проекции скорости точки на подвижные оси:
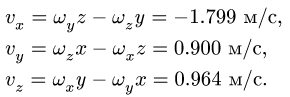
3. Модуль скорости точки 
4. Дифференцируя пo t проекции угловой скорости, получаем компоненты углового ускорения тела в подвижных осях:
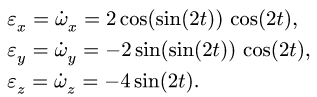
При t = 1 получаем

Модуль углового ускорения 
5. Ускорение точки представляем в виде векторной суммы:
Гл. 10. Сферическое движение тела
где  — вращательное, a
— вращательное, a  — осестремительное ускорение. Вычисляем отдельно их проекции на оси
— осестремительное ускорение. Вычисляем отдельно их проекции на оси 
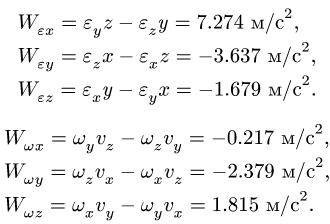
Компоненты ускорения получаем, суммируя 
6. Модуль ускорения  Ответы занесем в таблицу. Скорости — в м/с, ускорения — в
Ответы занесем в таблицу. Скорости — в м/с, ускорения — в 

Замечание 1. При сферическом движении тела векторы угловой скорости и углового ускорения не лежат на одной прямой
 а вектор осестремительного ускорения в общем случае не перпендикулярен вектору вращательного ускорения. В этом можно убедиться, вычислив скалярное произведение
а вектор осестремительного ускорения в общем случае не перпендикулярен вектору вращательного ускорения. В этом можно убедиться, вычислив скалярное произведение 
Замечание 2. Кинематические уравнения Эйлера для определения проекций угловой скорости на неподвижные оси координат имеют вид
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Плоско-параллельное движение твердого тела
- Движение твердого тела, имеющего неподвижную точку
- Движение твердого тела
- Сложение движений точки
- Произвольная пространственная система сил
- Центр параллельных сил и центр тяжести
- Поступательное движение твердого тела
- Вращение твердого тела вокруг неподвижной оси
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.