- Варианты передвижения робота на колесах
- Робот за 3 минуты
- Расчет числа оборотов
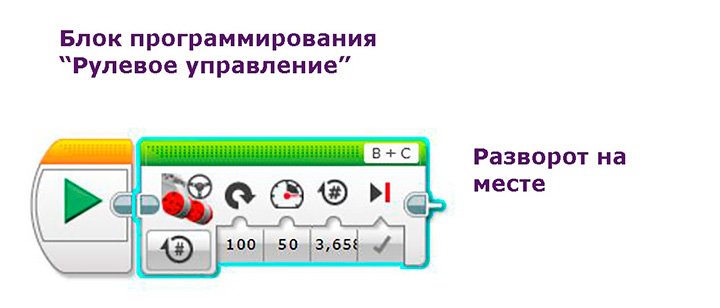
- Разворот на месте
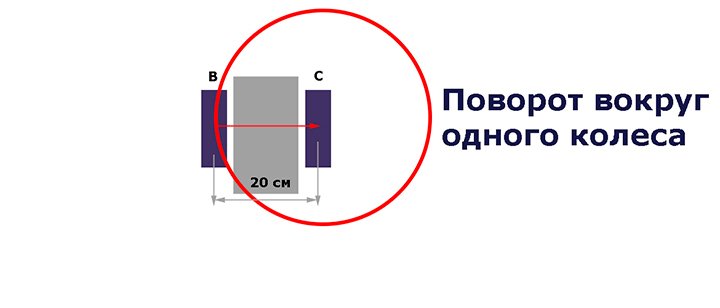
- Поворот вокруг одного колеса
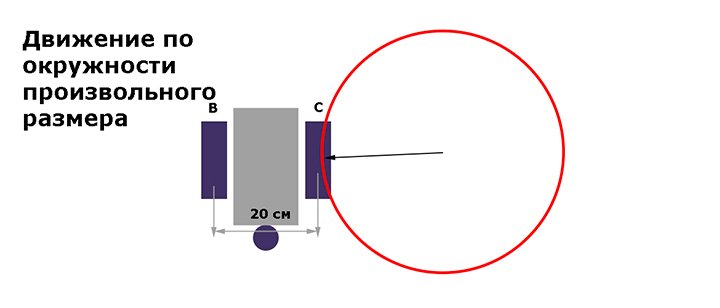
- Движение по окружности произвольного диаметра
- Движение по линии с объездом препятствия (кирпич)
- Движение робота по окружности
- Маневрирование при движении. Движение робота по кругу
- «Календарь счастливой жизни: инструменты и механизм работы для достижения своих целей»
- «Управление общеобразовательной организацией: новые тенденции и современные технологии»
- Дистанционное обучение как современный формат преподавания
- Педагогическая деятельность в контексте профессионального стандарта педагога и ФГОС
- Авторская разработка онлайн-курса
- Оставьте свой комментарий
- Подарочные сертификаты
Варианты передвижения робота на колесах
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
Программа для Lego EV3 для движения робота на заданное количество оборотов.
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
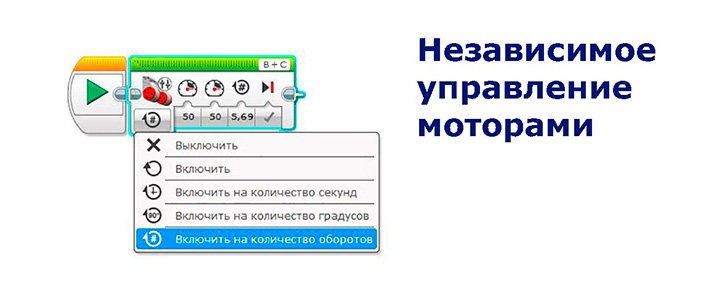
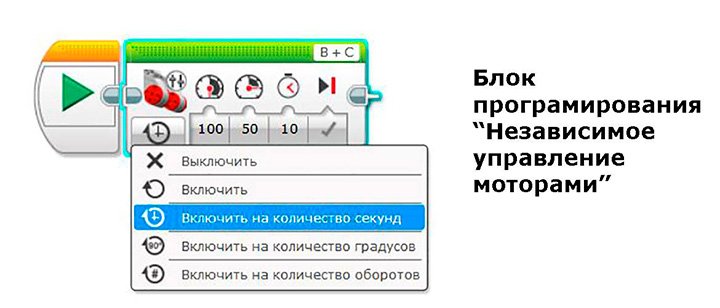
- При втором способе используется блок «Независимое управление моторами».
 независимое управление движение вперед на один метр
независимое управление движение вперед на один метр
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.
 робот тележка лего
робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
Разворот на месте
- Разворот робота на 360 градусов
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или — 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
 разворот робота на месте рулевое управление
разворот робота на месте рулевое управление
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
 разворот робота на месте независимое управление
разворот робота на месте независимое управление
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
 Поворот робота вокруг одного колеса
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
 Движение робота по окружности произвольного размера
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
 Независимое управление моторами Lego EV3 произвольная окружность
Независимое управление моторами Lego EV3 произвольная окружность
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Движение по линии с объездом препятствия (кирпич)
Движение робота по окружности
Задача 1 Проехать ровно 30 см.
Определим, на какое расстояние проедет робот за один оборот колеса?

Представим упрощенную модель колеса: окружность

Диаметр окружности – отрезок, соединяющий две точки окружности и проходящий через ее центр. Обозначим буквой d длину этого отрезка.

Если растянуть окружность в одну линию, то получится отрезок, длина которого L

Длину окружности можно рассчитать по формуле:  , где
, где  — (произносится «пи» ) — математическая постоянная величина, выражающая отношение длины окружности к длине её диаметра.
— (произносится «пи» ) — математическая постоянная величина, выражающая отношение длины окружности к длине её диаметра.
Попробуйте взять линейку и измерить диаметр колеса. У вас должно получиться число, близкое к 5.6 см. На самом деле диаметр и ширина колеса указаны на шине: 56*26, где 56 мм =5.6 см – длина, 26 мм=2.6 см – ширина.
Чтобы рассчитать, сколько оборотов должно совершить колесо, чтобы проехать на заданное расстояние, необходимо это расстояние разделить на длину дуги

В сервомоторе имеется встроенный датчик угла поворота в градусах, с помощью которого можно управлять точностью движения робота.
Один оборот колеса составляет угол поворота датчика — 360°
Чтобы точно рассчитать расстояние, на которое проедет робот, надо определить угол поворота датчика в градусах:

Как угол задать в программе? Для этого будем использовать два раздела:

Теперь в программе надо включить оба мотора со средней скоростью 3 и остановить их, когда датчик угла поворота превысит рассчитанное в функции значение GR
Подключим датчик угла поворота с А, подключим любой порт (В или С), установим требуемое значение с помощью модификатора:

Получим готовую программу:

Меняя в этой программе значение R , будем заставлять робота двигаться вперед на заданное расстояние.
Задача 2 Повернуть робота на заданный угол 90°
Чтобы повернуть на заданный угол, надо учитывать и расстояние между колесами — T , так как одно колесо стоит, а второе движется по кругу:

Угол, образованный двумя радиусами называется центральным. Длина дуги, которую должно описать колесо пропорционально ее радиусу и величине центрального угла и рассчитывается по формуле:

Для создания программы также воспользуемся функцией и датчиком угла поворота.


Задание для самостоятельной работы:
1) Бесконечное движение вперед-назад внутри замкнутого круга
2) Движение внутри квадрата
3) Движение по лабиринту.
С помощью рулетки измерьте расстояния и напишите программу движения робота:
Маневрирование при движении. Движение робота по кругу
«Календарь счастливой жизни:
инструменты и механизм работы
для достижения своих целей»
Сертификат и скидка на обучение каждому участнику


«Управление общеобразовательной организацией:
новые тенденции и современные технологии»
Свидетельство и скидка на обучение каждому участнику
Описание презентации по отдельным слайдам:
Маневрирование при движении. Движение по кругу
Любое движение робота по поверхности можно разложить на отдельные простые движения: Движение по прямой; Различные повороты.
Движение по прямой Мы научились программировать движение робота по прямой, с помощью регулирования мощности моторов: 1. На моторах одинаковые мощности — робот едет вперед. 2. На моторах одинаковые мощности с отрицательным знаком — робот едет назад.
Программа для движения вперед
Повороты Если на моторах одинаковые мощности по значению, но с разным знаком, то роботу будет поворачиваться на месте вокруг своей оси. Если один из моторов полностью остановлен (мощность 0), то робот будет выполнять поворот по дуге.
Поворот вокруг своей оси
Поворот по дуге
Вопрос Что произойдет, если соотношение скоростей двигателей будет не один к одному – мощности на разных моторах будут разные?
Движение по кругу W — ширина колесной базы робота. r – радиус, по которому движется внутреннее колесо R – радиус, по которому движется внешнее колесо
Вычислим отношение длин окружностей, пройденных внешним и внутренним колесами. Вероятно мощности двигателей будут распределяться в такой же пропорции.
где к — коэффициент отношения между прохождением окружности внешнего колеса и внутреннего;
Примерная программа для робота, который будет ехать по окружности внутреннего радиуса r = 30 см task main() Коэффициент к вычисляется отдельно и подставляется в программу в виде числового значения.

Курс повышения квалификации
Дистанционное обучение как современный формат преподавания
- Сейчас обучается 930 человек из 80 регионов
Курс повышения квалификации
Педагогическая деятельность в контексте профессионального стандарта педагога и ФГОС
- Курс добавлен 18.11.2021
- Сейчас обучается 48 человек из 24 регионов
Курс повышения квалификации
Авторская разработка онлайн-курса
- Сейчас обучается 69 человек из 38 регионов
Ищем педагогов в команду «Инфоурок»

- Маликов Владимир ЕвгеньевичНаписать 1610 20.06.2017
Номер материала: ДБ-569953
- 20.06.2017 243
- 20.06.2017 424
- 20.06.2017 577
- 20.06.2017 256
- 20.06.2017 206
- 20.06.2017 540
- 20.06.2017 457
Не нашли то, что искали?
Вам будут интересны эти курсы:
Оставьте свой комментарий
Авторизуйтесь, чтобы задавать вопросы.

Учителя о ЕГЭ: секреты успешной подготовки
Время чтения: 11 минут
Проходной балл ЕГЭ для поступления на бюджет снизился впервые за 10 лет
Время чтения: 3 минуты
Детский омбудсмен предложила ужесточить наказание за преступления против детей
Время чтения: 1 минута
В Роспотребнадзоре заявили о широком распространении COVID-19 среди детей
Время чтения: 1 минута
Онлайн-конференция об управлении общеобразовательной организацией
Время чтения: 2 минуты
Утвержден список федеральных инновационных площадок в образовании на 2022 год
Время чтения: 1 минута
В Госдуме обсудят введение обязательных тестов на наркотики в школах
Время чтения: 1 минута
Подарочные сертификаты
Ответственность за разрешение любых спорных моментов, касающихся самих материалов и их содержания, берут на себя пользователи, разместившие материал на сайте. Однако администрация сайта готова оказать всяческую поддержку в решении любых вопросов, связанных с работой и содержанием сайта. Если Вы заметили, что на данном сайте незаконно используются материалы, сообщите об этом администрации сайта через форму обратной связи.
Все материалы, размещенные на сайте, созданы авторами сайта либо размещены пользователями сайта и представлены на сайте исключительно для ознакомления. Авторские права на материалы принадлежат их законным авторам. Частичное или полное копирование материалов сайта без письменного разрешения администрации сайта запрещено! Мнение администрации может не совпадать с точкой зрения авторов.