- 4.1. Способ перемены плоскостей проекций
- Упражнение
- Упражнение
- 4.2. Способ вращения
- Упражнение
- 4.3. Определение истинной величины треугольника способом вращения
- 4.4. Задачи для самостоятельной работы
- Методы преобразования эпюра Монжа в начертательной геометрии с примерами
- Метод замены (перемены) плоскостей проекций
- Метод вращения вокруг проецирующих осей
- Вращение вокруг линий уровня (горизонтали или фронтали)
- Метод совмещения
- Метод плоско-параллельного перемещения
- Определение действительной величины плоского угла но его ортогональным проекциям
4.1. Способ перемены плоскостей проекций
Чаще всего геометрические объекты расположены относительно плоскостей проекций в общем положении, и при решении задач для достижения поставленной цели необходимо выполнять много построений.
Количество построений можно значительно сократить, если геометрические элементы будут расположены в частном положении относительно плоскостей проекций.
Существуют два основных способа преобразования чертежа, при которых:
- Объект остаётся неподвижным, при этом меняется аппарат проецирования;
- Условия проецирования не меняются, но изменяется положение объекта в пространстве.
К первому способу относится способ перемены плоскостей проекций.
Ко второму – способ вращения (вращение вокруг линии уровня и вращение вокруг проецирующей прямой); способ плоскопараллельного перемещения.
Рассмотрим наиболее часто используемые способы при решении задач.
Способ перемены плоскостей проекций или способ введения дополнительных плоскостей проекций (ДПП) позволяет перейти от заданной системы плоскостей проекций к новой системе, более удобной для решения той или иной задачи.
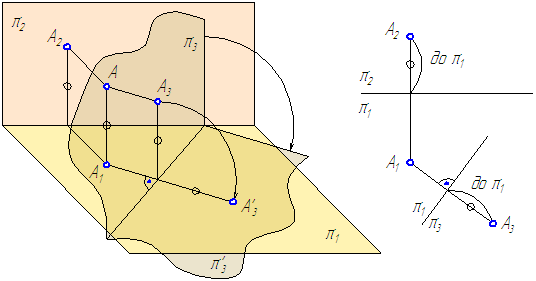
Рассмотрим положение точки А относительно известной системы плоскостей проекций π2⊥π1 (Рисунок 4.1, а и б).
Введём π4⊥π1, при этом получим новую систему двух взаимно перпендикулярных плоскостей. Положение точки А на эпюре будет в этом случае задано проекциями А1 и А4.
Правила перемены плоскостей проекций:
- Новая плоскость проекций вводится перпендикулярно, по крайней мере, одной из заданных на чертеже плоскостей проекций;
- ДПП располагается относительно проецируемого объекта в частном положении, удобном для решения поставленной задачи;
- Новую плоскость совмещаем вращением вокруг новой оси проекций с плоскостью, которой она перпендикулярна на свободное место так, чтобы проекции не накладывались друг на друга.
а б
Рисунок 4.1 – Способ перемены плоскостей проекций
- На чертеже новая проекция геометрического элемента находится на линии связи, перпендикулярной новой оси проекций:
- Расстояние от А4 до π1/π4 равно расстоянию от А2 до π2/π1, так как величина этих отрезков (отмечены ○) определяет расстояние от точки А до плоскости проекций π1.
При решении задачи необходимо заранее обдумать, как расположить новую плоскость проекций относительно заданных геометрических объектов (прямой, плоскости и др.), и как на чертеже провести новую ось проекций, чтобы в новой системе плоскостей заданные объекты заняли бы частные положения по отношению к новой плоскости проекций.
Упражнение
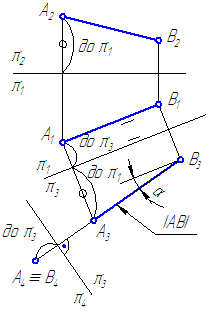
1. Спроецировать отрезок общего положения АВ в точку.
- Введём ДПП π4//А1В1 и π4⊥π1 (Рисунок 4.2). В новой системе двух взаимно перпендикулярных плоскостей проекций π1/π4 отрезок АВспроецируется на π4 в натуральную величину и по этой проекции можем определить угол наклона отрезка к плоскости проекций π1
Упражнение
2. Дана плоскость общего положения – σ, заданная треугольником АВС (Рисунок 4.3).
Определить истинную величину треугольника.
- Введём ДПП π4⊥σ и π4⊥π1, для чего построим горизонталь в плоскости треугольника и проведём новую ось проекций π1/π4⊥g1согласно теореме о перпендикуляре к плоскости. На π4 плоскость σ спроецируется в прямую, что означает σ⊥πp4.
- Введём ДПП π5//σ (π4/π5//А4В4С4) и π4⊥π5. На π5 проекция А5В5С5 – есть истинная величина треугольника.
4.2. Способ вращения
Сущность способа вращения состоит в том, что положение системы плоскостей проекций считается неизменным в пространстве, а положение проецируемого объекта относительно неподвижных плоскостей изменяется.
Из сравнения сущности обоих способов видно, что решение задач, которые требуют применения преобразования ортогонального чертежа, может быть выполнено любым из этих способов, результат при этом должен получиться одинаковым. Основа выбора того или иного способа – рациональность решения.
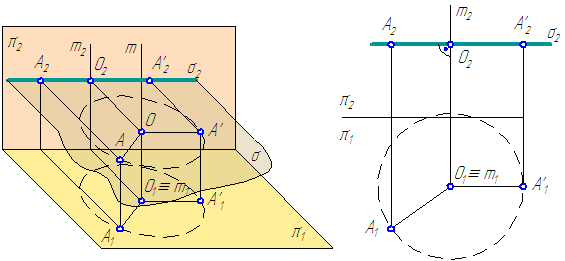
Вращение заданных элементов будем осуществлять вокруг проецирующей прямой, то есть прямой, перпендикулярной какой-либо плоскости проекций, при этом все точки заданных элементов поворачиваются в одну и ту же сторону на один и тот же угол (Рисунок 4.4, а и б). Ось вращения и объект вращения составляют твёрдое тело.
А – точка в пространстве;
О – центр вращения точки А;
АО – радиус вращения
а б
Рисунок 4.4 – Способ вращения вокруг прямой, перпендикулярной π2
Точка описывает в пространстве окружность радиусом АО. Плоскость окружности перпендикулярна оси вращения (σ⊥m).
Так как m⊥π2 , то σ//π2, следовательно, σ⊥π1, ⇒ σ1⊥m1, и поэтому σ проецируется на π1 в виде прямой, перпендикулярной проекции оси вращения, а на π2 траектория вращающейся точки проецируется в виде окружности с центром О2≡m2.
Пусть ось вращения m⊥π1 (Рисунок 4.5, а и б). Плоскость окружности σ⊥m.
а б
Рисунок 4.5 – Вращение вокруг прямой, перпендикулярной π1
left.beginsigmaparallelpi_1\sigmaperp pi_2\endright> npu;mperppi_1Longrightarrowsigma_2perp m_2
Свойства проекций
- На плоскость проекций, перпендикулярную оси вращения, траектория вращающейся вокруг этой оси точки проецируется без искажения, то есть в окружность с центром, совпадающим с проекцией оси вращения на эту плоскость и радиусом, равным расстоянию от вращаемой точки до оси вращения.
- На плоскость проекций, параллельную оси вращения, траектория вращающейся точки проецируется в отрезок, перпендикулярный проекции оси вращения на эту плоскость.
- На плоскость проекций, перпендикулярную оси вращения, проекция вращаемого объекта своих размеров и формы не меняет.
Упражнение
Дано : отрезок общего положения – АВ.
Определить : способом вращения истинную величину отрезка и углы наклона его к плоскостям проекций.
1. Выберем ось вращения m⊥π1 и проходящую через точку В (Рисунок 4.6).
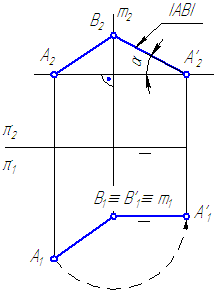
На плоскости проекций π2 проекция траектории перемещения точки А – прямая,
A_2 overlineperp m_2;u;A_2overlineparallelpi_2/pi_1
На плоскости проекций π1 проекция траектории перемещения точки А – окружность радиусом |А1В1|.
Повернем отрезок до положения, параллельного плоскости проекций π2. Получим натуральную величину отрезка.
Угол наклона отрезка АВ к плоскости проекций π1 будет угол
alpha=anglewidehat<A_2overline_2;;overline_2overline_2> .
Для того, чтобы определить угол наклона АВ к плоскости проекций π2, надо ввести новую ось вращения перпендикулярно π2 и повторить построения.
4.3. Определение истинной величины треугольника способом вращения
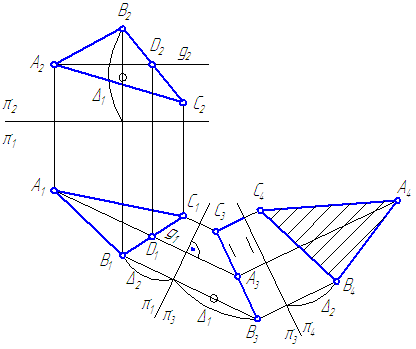
Пусть плоскость σ задана треугольником. Необходимо определить истинную величину треугольника (Рисунок 4.7).
Одним поворотом вокруг оси, перпендикулярной к плоскости проекций, истинную форму треугольника получить нельзя (так же как и введением одной ДПП).
Вращая вокруг оси m, перпендикулярной π1 можно расположить плоскость ΔАВС⊥π2 (а вращая вокруг оси n⊥π2 можно расположить плоскость ΔАВС⊥π1).
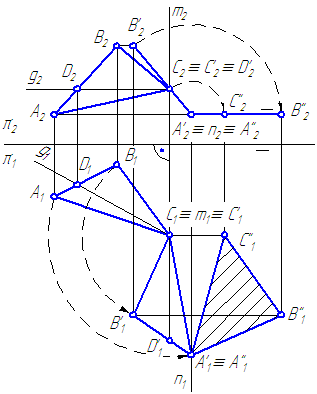
Рисунок 4.7
- Положим σ’ должна быть перпендикулярна π2. Для чего построим CD – горизонталь h плоскости σ. Введём первую ось вращения m⊥π1, например, через точку С.
- Повернём треугольник вокруг m до положения, когда
overlineperppi_2Rightarrowoverline_1overline_1perppi_2/pi_1
На основании 3-го свойства, новая горизонтальная проекция треугольника overline по величине должна равняться A1B1C1, а фронтальная проекция треугольника будет представлять отрезок. - Введём вторую ось вращения n⊥π2 через точку overline_2 . Повернём фронтальную проекцию overline в новое положение overline<overlineoverlineoverline>parallelpi_2/pi_1 . На π1 получим треугольник overline<overlineoverlineoverline> , равный истинной величине треугольника АВС.
4.4. Задачи для самостоятельной работы
Двумя способами преобразования ортогонального чертежа:
1. Определить расстояние от точки D до отрезка АВ – общего положения (Рисунок 4.8).
Рисунок 4.8
2. Определить расстояние между двумя параллельными прямыми общего положения (АВ//CD) (Рисунок 4.9).
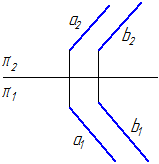
Рисунок 4.9
3. Определить расстояние между двумя скрещивающимися прямыми, заданными отрезками АВ и CD (Рисунок 4.10).
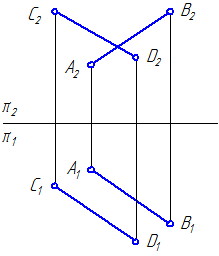
Рисунок 4.10
4. Построить недостающую проекцию точки D при условии, что задана σ=ΔАВС – общего положения и первая проекция точки D1, Dотстоит от плоскости σ на 30 мм (Рисунок 4.11).
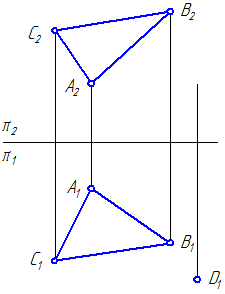
Рисунок 4.11
5. Дан отрезок АВ – общего положения. Ось вращения не проходит через АВ (Рисунок 4.12). Определить способом вращения истинную величину АВ.
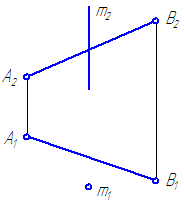
Рисунок 4.12
6. Задана прямая общего положения m и точка А вне прямой. Построить плоскость, проходящую через точку А и перпендикулярную прямой m (Рисунок 4.13).
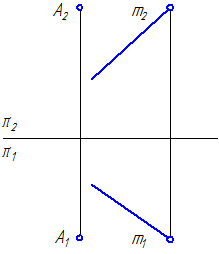
Рисунок 4.13
Методы преобразования эпюра Монжа в начертательной геометрии с примерами
Содержание:
Методы преобразования эпюра Монжа:
Как видно из предыдущего материала, все геометрические задачи решаются проще, если объекты (или хотя бы один объект) заданы в частном положении.
Для перевода объектов из общего положения в частное с целью упрощения решения задач разработаны методы преобразования эпюра Монжа. Они делятся на два вида:
- Геометрический объект при преобразовании остается неподвижным, а плоскости проекций меняют свое положение так, чтобы объект находился относительно них в частном положении (метод перемены или замены плоскостей проекций);
- Плоскости проекций при преобразовании остаются неподвижными , а объект меняет свое положение так, чтобы относительно плоскостей проекций он занял частное положение (метод вращения вокруг проецирующей оси, метод совмещения, метод вращения вокруг линий уровня, метод плоско-параллельного перемещения).
Метод замены (перемены) плоскостей проекций
Смысл метода заключается в том, что в систему плоскостей проекций вводятся дополнительные плоскости проекций, по отношению к которым объект занимает частное положение (другими словами, плоскости проекций заменяются другими плоскостями). Ортогональность новых систем плоскостей проекций при этом сохраняется.
Замена плоскостей проекций осуществляется в последовательности: 
Обычно производят одну или две замены плоскостей проекций.
На рисунке 6.1 в наглядной форме показана методика проведения замены плоскостей проекций. На рисунке 6.1а представлена замена одной фронтальной плоскости проекций (V —> Vi), а на рисунке 6.16 — замена двух плоскостей проекций 
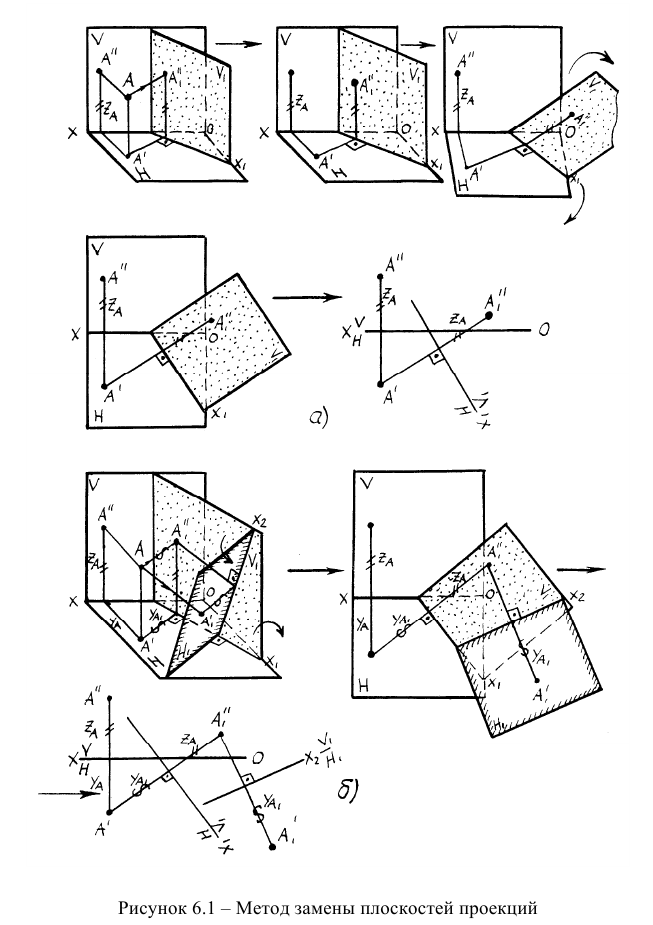
Из представленных наглядных изображений и эпюров вытекают следующие правила построения новых фронтальных и горизонтальных проекций точки на дополнительные плоскости проекций:
- 1) ПРИ ЗАМЕНЕ ПЛОСКОСТИ V на
 . Для того, чтобы построить новую фронтальную проекцию точки на новой плоскости проекций
. Для того, чтобы построить новую фронтальную проекцию точки на новой плоскости проекций
 . Для того, чтобы построить новую фронтальную проекцию точки на новой плоскости проекций
. Для того, чтобы построить новую фронтальную проекцию точки на новой плоскости проекций 
необходимо от новой оси по новой линии связи отложить аппликату точки из предыдущей системы плоскостей проекций.
- 2) ПРИ ЗАМЕНЕ ПЛОСКОСТИ Н на Для того, чтобы построить новую горизонтальную проекцию точки на новой плоскости проекций необходимо от новой оси по новой линии связи отложить ординату точки из предыдущей системы плоскостей проекций.
 Для того, чтобы построить новую горизонтальную проекцию точки на новой плоскости проекций
Для того, чтобы построить новую горизонтальную проекцию точки на новой плоскости проекций  необходимо от новой оси по новой линии связи отложить ординату точки из предыдущей системы плоскостей проекций.
необходимо от новой оси по новой линии связи отложить ординату точки из предыдущей системы плоскостей проекций.В методе замены плоскостей проекций выделяют две основные задачи:
- Перевод прямой общего положения в проецирующую;
- Перевод плоскости общего положения в проецирующую.
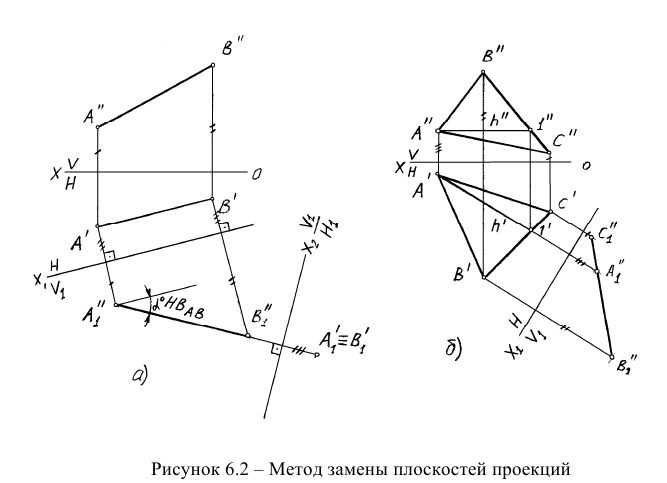
На рисунке 6.2а показано преобразование прямой общего положения в проецирующую прямую, которое выполнено двумя заменами плоскостей проекций  Первая замена осуществляется параллельно
Первая замена осуществляется параллельно
прямой AВ, а вторая — перпендикулярно прямой АВ. Следует заметить, что при решении задачи определяется натуральная величина прямой (новая фронтальная проекция  и угол наклона прямой к плоскости проекций Н (угол а°).
и угол наклона прямой к плоскости проекций Н (угол а°).
На рисунке 6.26 показано преобразование плоскости общего положения, заданной треугольником АВС, в проецирующую плоскость, которое выполнено одной заменой плоскостей проекций  Замена осуществляется перпендикулярно горизонтали, проведенной в плоскости треугольника АВС для обеспечения перпендикулярности двух плоскостей (плоскости треугольника и новой плоскости проекций
Замена осуществляется перпендикулярно горизонтали, проведенной в плоскости треугольника АВС для обеспечения перпендикулярности двух плоскостей (плоскости треугольника и новой плоскости проекций 
Рассмотренные задачи положены в основу решения многих геометрических задач.
Пример: Определить расстояние между двумя параллельными прямыми АВ и CD (Рис.6.3).
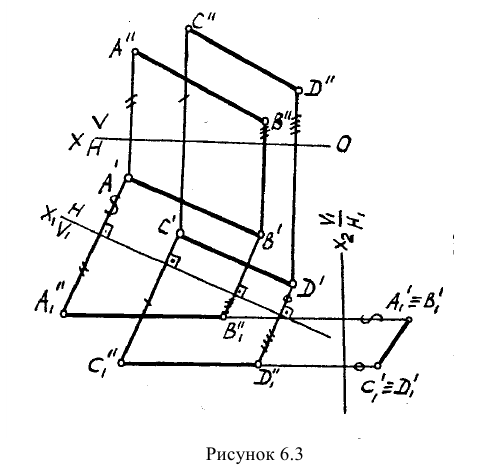
Решение: Расстояние между параллельными прямыми определится, если обе прямые преобразовать в проецирующие. Тогда расстояние между двумя полученными точками будет являться искомым расстоянием. Преобразование произведем двумя заменами 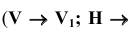

Пример: Определить угол между двумя плоскостями (двугранный угол). 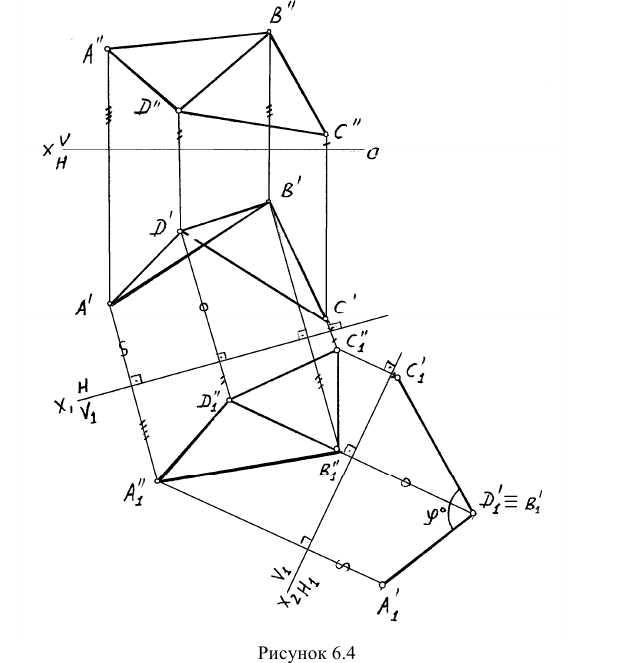
Решение: Двугранный угол определится, если общее ребро угла перевести в проецирующее положение (см. рисунок 6.2а). Тогда ребро «вырождается» в точку, а плоскости — в линии. Угол между линиями является искомым углом (рисунок 6.4).
Пример: Определить натуральную величину треугольника АВС.
Решение: Натуральную величину треугольника определим двумя заменами 
Сначала треугольник переведем в проецирующее положение, а затем — в параллельное. В последнем положении плоскость треугольника будет параллельна новой плоскости проекций  и спроецируется на эту плоскость в натуральную величину (рисунок 6.5).
и спроецируется на эту плоскость в натуральную величину (рисунок 6.5).
Метод вращения вокруг проецирующих осей
Метод заключается в том, что геометрический объект (прямую или плоскость) вращают вокруг проецирующей оси до положения параллельности какой-либо плоскости проекций. В результате вращения геометрический объект проецируется на плоскость проекций в натуральную величину. На рисунке 6.6 в наглядной форме представлено вращение вокруг горизонтально-проецирующей оси (а) и вокруг фронтально-проецирующей оси (б) точки А. 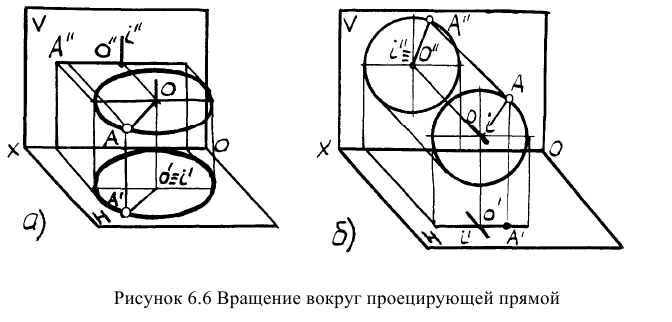
Из приведенных схем видно, что если точка вращается вокруг горизонтально-проецирующей оси, то её горизонтальная проекция перемещается по дуге окружности, а фронтальная — по прямой линии, параллельной оси ОХ. При вращении вокруг фронтально-проецирующей оси наблюдается обратная картина.
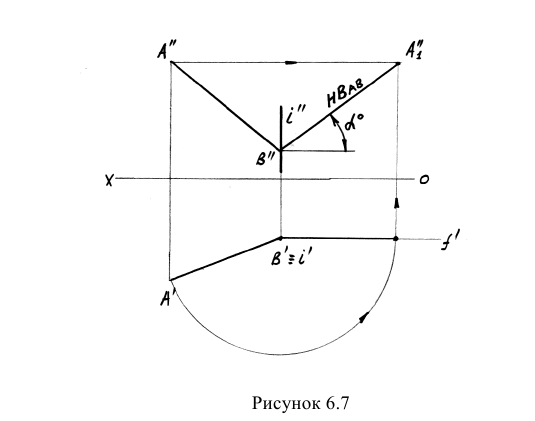
Пример: Определить угол наклона прямой к плоскости проекций Н и натуральную величину прямой.
Решение: НВ прямой и угол  определится, если прямую вращать вокруг горизонтально-проецирующей оси до параллельности плоскости проекций V. Ось проведем, например, через точку В (рисунок 6.7).
определится, если прямую вращать вокруг горизонтально-проецирующей оси до параллельности плоскости проекций V. Ось проведем, например, через точку В (рисунок 6.7).
Вращение вокруг линий уровня (горизонтали или фронтали)
Метод вращения вокруг горизонтали или фронтали заключается в том, что объект, например, плоскую фигуру вращают вокруг горизонтали или фронтали, проведенной в плоскости, до положения параллельности какой-либо плоскости проекций. После окончания вращения объект проецируется на плоскость проекций в натуральную величину (рисунок 6.8).
Главным вопросом метода вращения вокруг линий уровня является вопрос о параметрах вращения. Параметры вращения — это аппарат для решения задач с использованием этого метода.
Параметрами вращения являются (рисунок 6.9):
- Объект вращения. Под объектом вращения следует понимать точку на геометрическом теле. Поэтому в каждой задаче важно определить точки, которые будут вращаться и конечное положение которых надо определить, чтобы получить решение;
- Ось вращения (выбирается произвольно, если не задана);
- Плоскость вращения объекта. Она проводится перпендикулярно оси вращения;
- Центр вращения объекта. Это точка пересечения оси с плоскостью вращения;
- Радиус вращения объекта. Это расстояние между точкой и центром вращения.
- Новое положение объекта вращения (выбирается такое, чтобы геометрический объект занял частное положение).
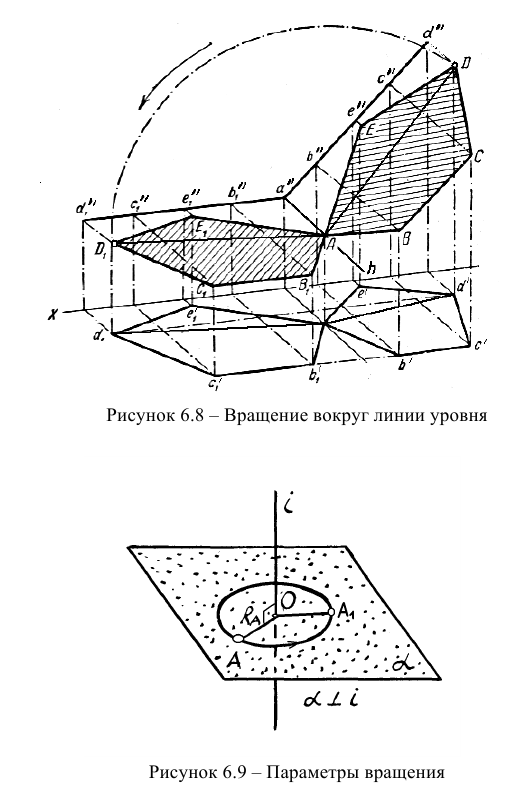
Конечное положение объекта вращения (на рисунке 6.8, например, точка D) определится, когда радиус вращения (отрезок AD) станет проецироваться на плоскость проекции в натуральную величину.
Пример: Определить натуральную величину треугольника АВС методом вращения вокруг горизонтали (рисунок 6.10).
Решение: План решения задачи и его реализация:
1) В плоскости треугольника проводим горизонталь h;
2) Определяем объекты вращения — точки В и С. Точка А не может являться объектом вращения, так как она находится на оси и не будет перемещается в плоскости вращения;
3) Проводим плоскости вращения точек В и С перпендикулярно 
4) Начинаем вращать точку, например. В; 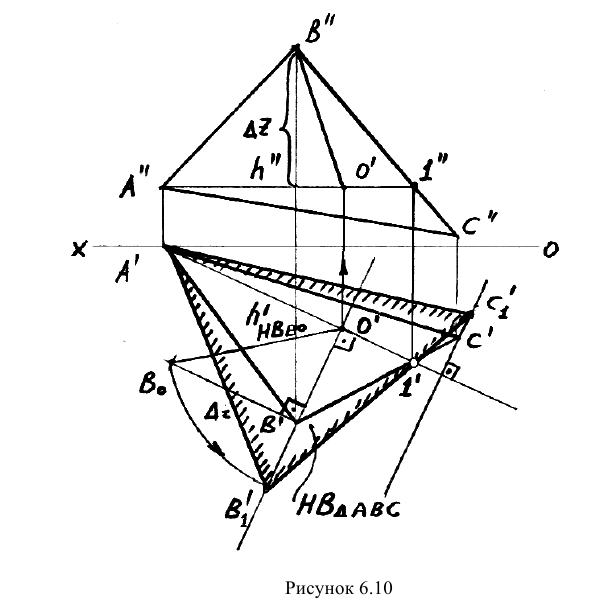
5) В месте пересечения плоскости вращения точки В с осью вращения находим центр вращения О 
6) Строим проекции радиуса вращения точки В (отрезок ОВ);
7) Находим НВ радиуса вращения ОВ и откладываем его на плоскости вращения точки В отточки 
8) Получаем окончательное положение точки после вращения (точка 
9) Положение точки С можно найти таким же способом или другим способом, соединив точки  до пересечения с плоскостью вращения точки С. Получим точку
до пересечения с плоскостью вращения точки С. Получим точку 
10) Полученные точки соединяем. Треугольник  — искомый.
— искомый.
Ранее рассматривался вопрос об определении углов между прямой и плоскостью и между двумя плоскостями (см. раздел «Метрические задачи») с помощью дополнительных углов. Было показано, что натуральную величину дополнительных углов наиболее целесообразно определять методами преобразования, например, методом вращения вокруг горизонтали или фронтали. Рассмотрим пример задачи на определение угла между двумя плоскостями.
Пример: Определить угол между плоскостью треугольника АВС и плоскостью а, заданной следами.
Решение: План решения и его реализация:
- В растворе двугранного угла возьмем любую точку К;
- Из точки К опустим перпендикуляры на обе плоскости (см. тему «Перпендикуляр к плоскости»);
- Между двумя перпендикулярами получаем дополнительный угол
- Определяем натуральную величину дополнительного угла методом вращения вокруг горизонтали h (см. тему «Вращение вокруг линий уровня»);
- Достраиваем полученную натуральную величину дополнительного угла до 180 градусов и получаем искомый угол (рисунок 6.11).

 (рисунок 6.11).
(рисунок 6.11).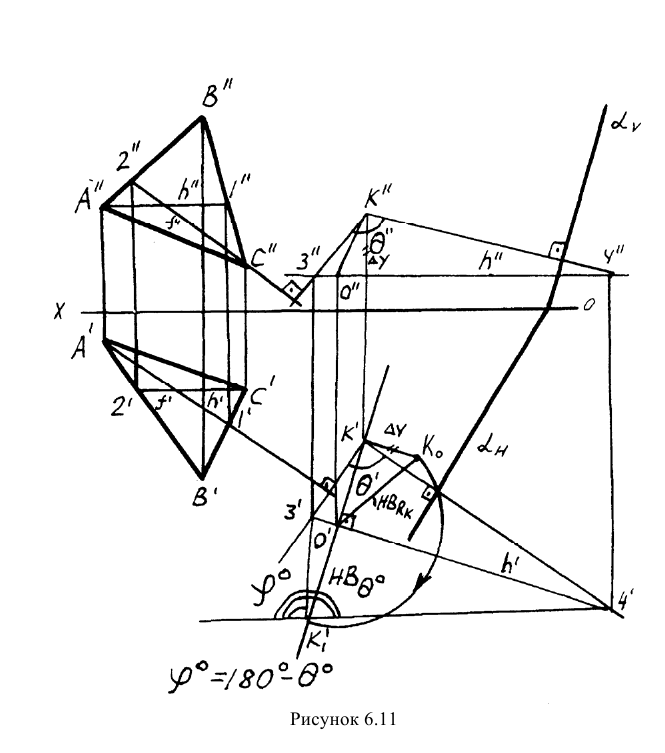
Метод совмещения
Метод совмещения представляет из себя частный случай вращения вокруг линии уровня. За ось вращения в этом случае принимают один из следов плоскости. Сущность метода заключается в том, что плоскость вместе с объектом, находящимся в ней, вращают до совмещения с плоскостью проекций. 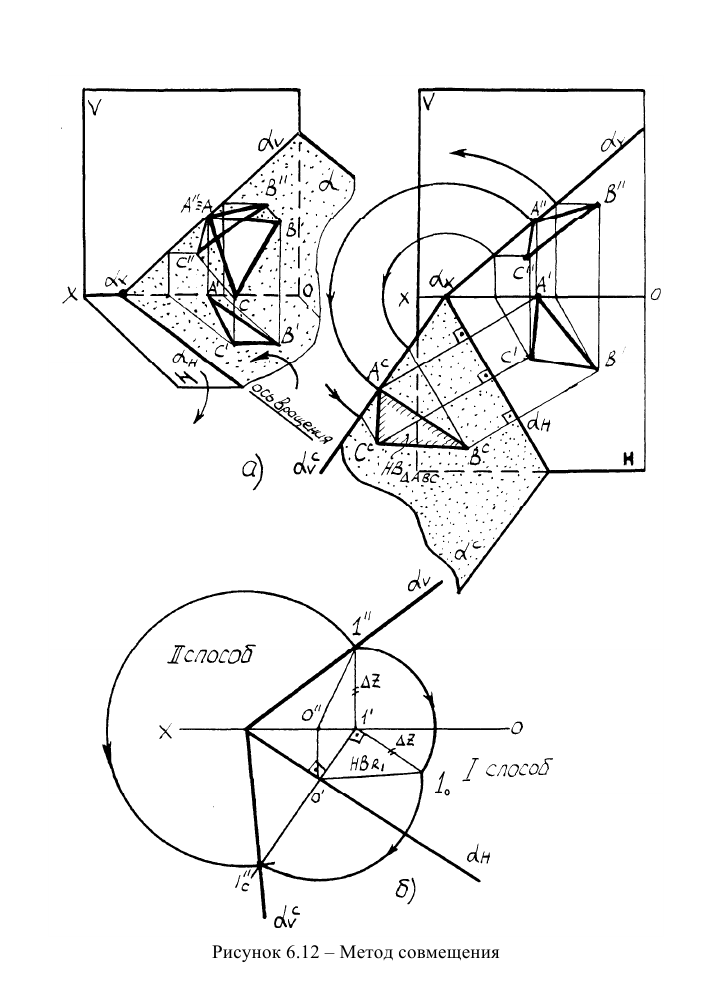
Наглядное изображение способа совмещения вокруг
горизонтального следа представлено на рисунке 6.12. Исходное положение плоскостей проекций и плоскости дано на рисунке 6.12а. После поворота плоскости проекций Н и плоскости а образуется единая плоская система, в которой заданная плоскость вместе с треугольником, принадлежащим этой плоскости, совмещена с плоскостью Н (рисунок 6.12а). Для метода совмещения характерны все параметры вращения, которые рассматривались выше.
Главным вопросом метода совмещения является построение совмещенного следа  , то есть следа, который вращается вместе с плоскостью и совмещается с плоскостью проекций. Его построение можно произвести двумя способами (рисунок 6.126). В первом способе построение ведется аналогично методу вращения вокруг горизонтали. Второй способ является прикладным, и он менее трудоемок по сравнению с первым.
, то есть следа, который вращается вместе с плоскостью и совмещается с плоскостью проекций. Его построение можно произвести двумя способами (рисунок 6.126). В первом способе построение ведется аналогично методу вращения вокруг горизонтали. Второй способ является прикладным, и он менее трудоемок по сравнению с первым.
Пример: Найти натуральную величину треугольника AВС, принадлежащего плоскости а.
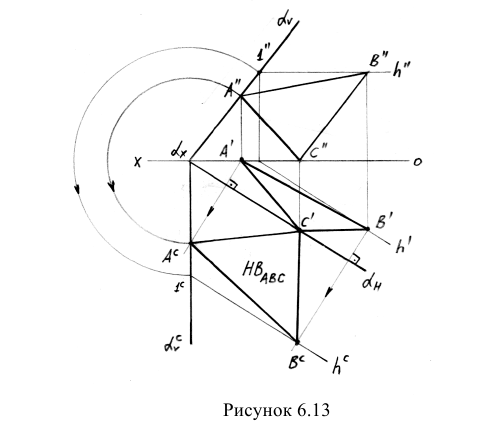
Решение: С помощью точки А, принадлежащей фронтальному следу, найдем совмещенный фронтальный след  (вторым способом).
(вторым способом).
Точка С треугольника находится на горизонтальном следе плоскости и поэтому не будет вращаться (горизонтальный след плоскости — ось вращения). Через точку В треугольника проведем горизонталь h и точку  с помощью дуги окружности переместим на совмещенный след (точка
с помощью дуги окружности переместим на совмещенный след (точка  . Через точку
. Через точку проведем горизонталь в совмещенном положении
проведем горизонталь в совмещенном положении  , а через точку
, а через точку  проведем плоскость вращения. На пересечении
проведем плоскость вращения. На пересечении  и плоскости вращения точки В найдем точку
и плоскости вращения точки В найдем точку  . Соединив точки
. Соединив точки  и
и  найдем НВ треугольника (рисунок 6.13).
найдем НВ треугольника (рисунок 6.13).
Пример: Методом совмещения построить наклонное сечение детали.
Решение: Секущая плоскость А-А в данном случае является фронтально проецирующей. Совмещение осуществлялось вращением вокруг горизонтального следа, который перпендикулярен горизонтальной оси проекций (рисунок 6.14). 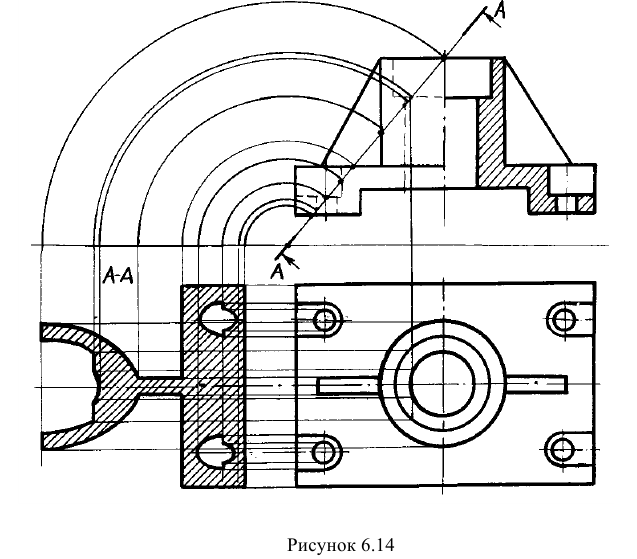
Метод плоско-параллельного перемещения
Плоско-параллельное перемещение — это вид механического движения объекта, когда каждая его точка перемещается в плоскости, параллельной какой-либо плоскости проекций, в результате чего объект перемещается на новое место и ему придаётся новое положение (рисунок 6.15).
Различают плоско-параллельное перемещение относительно плоскости Н — ППП(Н) и относительно плоскости V — ППП(У). 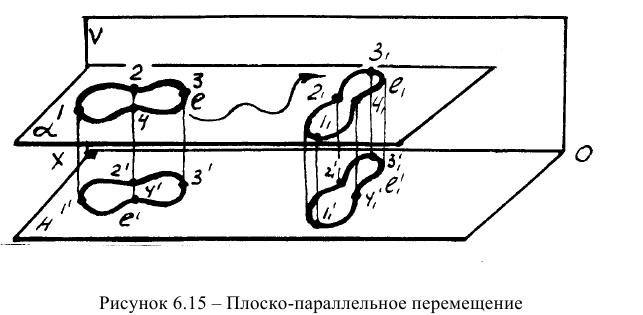
При плоско-параллельном перемещении объекта относительно плоскости Н горизонтальная проекция объекта изменяет свое положение, не изменяя своей формы и размеров. Фронтальная проекция объекта при этом изменяется по форме и размерам, а каждая точка объекта перемещается по прямым линиям, параллельным оси ОХ. ППП(Н) показано на рисунке 6.16а. Обратная картина наблюдается при ППП(V) -рисунок 6.166.
Оба вида плоско-параллельного перемещения, представленные на рисунке, применяются при решении типовых задач на определение натуральной величины плоских фигур.
Для решения задачи по определению натуральной величины отрезка прямой общего положения необходимо сделать одно перемещение и разместить одну из проекций так, чтобы она стала параллельна оси ОХ. 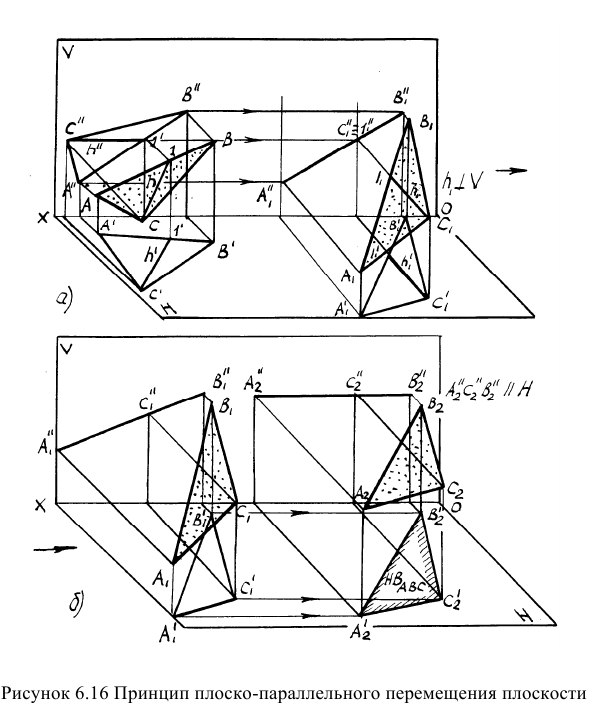
Для решения задачи на определение натуральной величины плоскости совершают два плоско-параллельных перемещения: сначала относительно одной плоскости проекций, а затем относительно другой.
Целью первого перемещения является перевод плоскости из общего положения в проецирующее. Плоскость станет проецирующей, если будет содержать прямую, перпендикулярную плоскости проекций. В качестве такой прямой используют горизонталь или фронталь. При первом перемещении проекция натуральной величины горизонтали или фронтали плоскости должна принять положение, перпендикулярное оси ОХ. Целью второго перемещения является перевод плоскости из проецирующего положения в положение, параллельное плоскости проекции. После этого плоскость проецируется в натуральную величину.
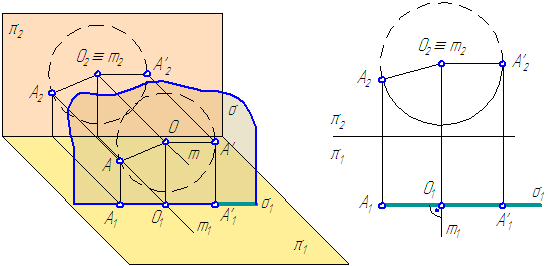
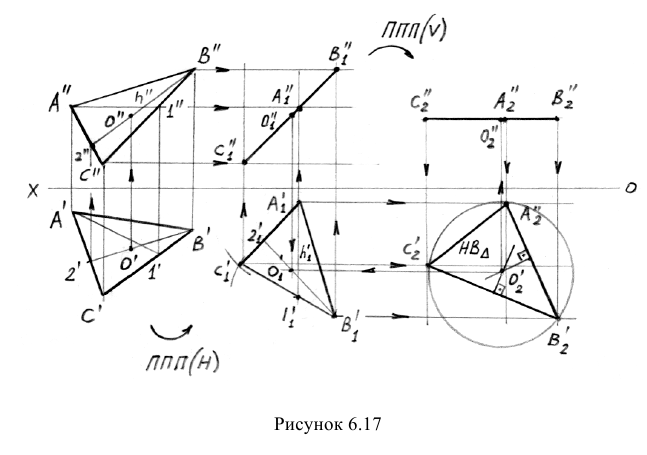
Пример: Методом плоско-параллельного перемещения определить центр окружности, описанной вокруг треугольника AВС.
Решение: Для того, чтобы найти центр описанной окружности треугольника, необходимо определить его натуральную величину. На основании вышерассмотренного материала совершим два плоскопараллельного перемещения: ППП(Н) и ППП(V) (рисунок 6.17).
Для преобразования плоскости треугольника во фронтально-проецирующую плоскость проведем в треугольнике горизонталь h и расположим её при первом ППП перпендикулярно оси ОХ. На ней построим треугольник  равный исходному треугольнику
равный исходному треугольнику  (известным методом с помощью циркуля). Полученную на фронтальной проекции линию плоско-параллельно перемещаем относительно V до положения, параллельного оси ОХ. На новой горизонтальной проекции треугольника получаем его натуральную величину. С помощью срединных перпендикуляров получаем центр описанной окружности
(известным методом с помощью циркуля). Полученную на фронтальной проекции линию плоско-параллельно перемещаем относительно V до положения, параллельного оси ОХ. На новой горизонтальной проекции треугольника получаем его натуральную величину. С помощью срединных перпендикуляров получаем центр описанной окружности  и возвращаем его на исходные проекции с помощью вспомогательной прямой В-2, проведенной в плоскости треугольника.
и возвращаем его на исходные проекции с помощью вспомогательной прямой В-2, проведенной в плоскости треугольника.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Касательные плоскости
- Пересечение поверхностей вращения плоскостью
- Виды, разрезы, сечения
- Геометрические тела
- Проецирование прямой линии
- Проецирование плоскости
- Плоскость на эпюре Монжа
- Позиционные задачи
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Определение действительной величины плоского угла но его ортогональным проекциям
Решение задачи сводится к перемещению плоскости общего положения, которой принадлежит угол, в положение, параллельное какой- либо плоскости проекции. Такое перемещение можно осуществить с помощью методов преобразования ортогональных проекций.
Наиболее рациональный путь решения задачи по переводу плоскости угла в положение, параллельное плоскости проекции, достигается путем вращения плоскости угла вокруг линии уровня.
В этом случае для получения ответа на поставленную задачу достаточно произвести поворот только одной точки вокруг горизонтали или фронтали плоскости угла.
При использовании других способов преобразования нам пришлось бы дважды менять плоскости проекции либо дважды осуществлять перемещение (вращение), параллельное плоскости проекции, т.е. в обоих случаях потребовалось построение двух вспомогательных проекций,
Приведенные ниже примеры иллюстрируют использование способа вращения вокруг линии уровня для решения задачи определения действительной величины плоского угла.
Пример 1: Определить угол между пересекающимися прямыми а и Ь.

Поворачиваем плоскость a(а Ç b)- вокруг ее горизонтали h в новое положение, параллельное горизонтальной плоскости. Точки А (А э а) и В (Вэ b) принадлежат оси вращения h (A, B)Ìh, поэтому при вращении плоскости а вокруг оси h они не изменяют своего положения.
Следовательно, для определения нового положения плоскости a1ïï Н достаточно осуществить поворот только одной точки К. Для этого проводим через К’ прямую, перпендикулярную h¢ ( с этой прямой будет совпадать горизонтальная проекция окружности, по которой перемещается точка при ее вращении вокруг горизонтали). Далее определяем положение центра вращения 0 и величину радиуса вращения R для точки К. Положение точки К1¢ совместно с А¢ и В¢ определяют новые проекции a’1 и b1¢ (прямых а и b),
задающих плоскость a1ôô Н. Поэтому А¢ К’ В’ равен искомому углу j°
Пример 2, Определить величину углов треугольника АВС. Повернем плоскость треугольника АВС вокруг фронтали и этого треугольника в положение, параллельное плоскости V. Через вершину А треугольника АВС проводим фронталь u(uu’). Точки А и D, как принадлежащие оси вращения, не изменяет своего положения в процессе преобразования. Поэтому, как и в предыдущем примере, достаточно повернуть только одну точку.
 На рис 7.3 в качестве такой точки взята вершина В треугольника АВС. Вершина треугольника С при вращении вокруг фронтали будет перемещаться по дуге окружности, плоскость которой перпендикулярна оси вращения u; поэтому фронтальная проекция этой окружности перпендикулярна u² и новое положение точки С1² определяется в точке пересечения этого перпендикуляра с новым положением (B1² D²). После такого поворота плоскость треугольника переведена в положение параллельное фронтальной плоскости V.
На рис 7.3 в качестве такой точки взята вершина В треугольника АВС. Вершина треугольника С при вращении вокруг фронтали будет перемещаться по дуге окружности, плоскость которой перпендикулярна оси вращения u; поэтому фронтальная проекция этой окружности перпендикулярна u² и новое положение точки С1² определяется в точке пересечения этого перпендикуляра с новым положением (B1² D²). После такого поворота плоскость треугольника переведена в положение параллельное фронтальной плоскости V.
 Следовательно, на основании свойства о проецировании плоской фигуры, параллельной плоскости проекции ( изложено в п.7) углы при вершинах А»В1² и C’1 проецируются в натуральную величину.
Следовательно, на основании свойства о проецировании плоской фигуры, параллельной плоскости проекции ( изложено в п.7) углы при вершинах А»В1² и C’1 проецируются в натуральную величину.
 7.2 Перпендикулярность прямых, прямой и плосксти. Перпендикулярность плоскостей
7.2 Перпендикулярность прямых, прямой и плосксти. Перпендикулярность плоскостей