Решение навигационного треугольника скоростей. Способы решения навигационного треугольника скоростей
Способы решения навигационного треугольника скоростей. Во время подготовки и выполнения полета экипажу часто приходится решать навигационный треугольник скоростей. Решить треугольник – значит найти неизвестные его элементы по известным. Действительно, некоторые навигационные элементы (например, курс, истинная скорость) могут быть измерены с помощью приборов в полете, другие (например, скорость и направление ветра), могут быть получены от метеослужбы в аэропорту. Тогда неизвестные, но необходимые для навигации параметры можно определить, используя взаимосвязь элементов НТС.
Самый наглядный, но не самый удобный способ решения НТС – графический. Можно с помощью транспортира и линейки на листе бумаги в выбранном масштабе нарисовать меридиан и известные элементы НТС (например, векторы Vи U) так, чтобы их расположение (величина и направление относительно меридиана) соответствовало условиям задачи. Тогда, достроив НТС до конца (в приведенном примере – дорисовав W), можно просто измерить линейкой величину путевой скорости, а транспортиром – угол сноса, ФПУ и любые другие элементы.
На практике в полете НТС, конечно, не рисуют. В России на протяжении многих десятилетий в качестве такого инструмента используется навигационная линейка НЛ-10М. Разумеется, эти задачи можно решать и на калькуляторе по формулам, приведенным в соответствующих главах.
В навигации принято выделять четыре типовые задачи решения навигационного треугольника скоростей. Наиболее часто приходится решать первые две из них, которые и будут здесь подробно рассмотрены.
Расчет путевой скорости и угла сноса по известному ветру. Такая задача решается во время предполетной подготовки, когда пилот рассчитывает навигационные элементы и заполняет штурманский бортовой журнал (операционный план полета- operation flight plan) – его левую часть, содержащую предполетные расчеты. Для каждого участка маршрута (от одного ППМ до другого) необходимо рассчитать УС и курс, который будет при данном ветре обеспечивать полет по ЛЗП, путевую скорость и время полета.
Исходными данными для задачи являются следующие величины:
— истинная воздушная скорость V. Для каждого типа ВС из его Руководства по летной эксплуатации (РЛЭ) примерно известно, какая истинная скорость V будет иметь место на данной высоте полета по маршруту;
— заданный путевой угол может быть измерен на карте, а на радионавигационных картах магнитные путевые углы (ЗМПУ) уже напечатаны для каждого участка маршрута;
— направление и скорость ветра. Эти данные экипаж получает во время метеоконсультации в аэропорту. Ветер по маршрутам, по которым выполняются полеты из данного аэропорта, включают в специальный бланк, находящийся в штурманской комнате аэропорта. Направление ветра в нем приводится метеорологическое;
— длина участка маршрута необходима для расчета времени полета на участке маршрута и может быть измерена или уже напечатана на карте;
— магнитное склонение определяется по карте с помощью изогон и необходимо толькодля перевода метеорологического направления ветра в навигационное.
В навигации общеприняты и предполагаются известными следующие единицы измерения: (расстояния – км, скорость – км/ч, время — минуты, угловые величины – градусы).
Рассмотрим порядок решения задачи на примере со следующими исходными данными:
— магнитный курс, при выдерживании которого ВС будет лететь по ЛЗП;
— время полета на участке маршрута.
1. Рассчитывается навигационное направление ветра:
δн = δ ± 180 °– ΔМ = 290 – 180 – (–4) = 114.
2. Рассчитывается угол ветра.
Из НТС известно, что УВ= δн – ФМПУ. Во время предполетной подготовки, когда решается эта задача, самолет еще не летит и, конечно, никакого фактического путевого угла (ФМПУ) еще не существует. Но ведь смысл данной задачи заключается в расчете такого курса, при котором самолет следовал по ЛЗП, то есть, чтобы выполнялось условие ФМПУ=ЗМПУ, поэтому в задаче этого типа угол ветра:
УВ= δн –ЗМПУ = 114 – 232 = – 118 = 242º.
Очевидно, что при таком УВ ветер дует влево и назад относительно направления полета. Следовательно, УС должен быть отрицательным (будет сносить влево), а путевая скорость получится меньше истинной.
Находят угол сноса и путевую скорость с использованием теоремы синусов). Из нее следует:
Расчет по этим формулам можно выполнить как на калькуляторе, так и на НЛ-10М.
При описании расчетов на НЛ-10М обычно используются небольшие рисунки шкал и устанавливаемых на них значений, описывающие алгоритм решения. Эти рисунки (схемки) принято называть «ключами» для решения задачи на НЛ-10.
На рис. 3.11 изображен ключ для определения УС и W. Кстати, этот ключ выгравирован и на самой НЛ-10.
Рис. 3.11. Определение угла сноса и путевой скорости (ключ)
Для его использования на шкале 5 (нумерация и названия шкал приведены в главе 4) визиркой устанавливается значение V и перемещением движка под визирную линию подводят значение УВ на шкале 3 (синусов). Затем визирка перемещается на значение U по шкале 5 и напротив нее по шкале 3 отсчитывается УС.
После этого в уме определяется КУВ=УВ+УС, на его значение передвигается визирка (по шкале 3) и напротив нее по шкале 5 отсчитывается W. Необходимо сделать несколько полезных замечаний, касающихся расчета на линейке. Во-первых, если УВ оказался больше 180°, его невозможно установить на шкале линейки. В этом случае этот же угол нужно представить как отрицательный: 242 = – 118. На шкале устанавливают 118. Знак на линейке, конечно, не устанавливают, но помнят, что УВ с минусом. Кстати это автоматически означает, что и УС будет отрицательным.
Во-вторых, если УС оказался меньше 5, его придется отсчитывать по шкале 4 (тангенсов). Это объясняется тем, что синусы и тангенсы малых углов примерно равны.
В-третьих, складывать УВ (точнее, то его значение, которое устанавливается на шкале, в нашем примере 118) и УС можно по модулю, невзирая на знаки. Это следует из того, что, если УВ представлен лежащим в диапазоне от –180° до +180°, то знаки УВ и УС всегда одинаковы.
В-четвертых, нужно помнить, что хотя УС и принято в ответе округлять до градуса, для расчета КУВ желательно его использовать более точно (учесть доли градуса). В противном случае W может быть определена с погрешностью. Особенно это важно, когда УС мал.
4. Рассчитывают курс следования, который обеспечит выполнение полета по ЛЗП.
Из НТС следует, что МК=ФМПУ–УС. Поскольку для выполнения полета необходимо, чтобы ФМПУ был равен ЗМПУ, то
Для рассматриваемого примера
5. Рассчитывают время полета на участке.
Расчет выполняется по путевой скорости. Очевидно, что
При расчете на калькуляторе непосредственно по этой формуле время будет получено в часах, поскольку W измеряется в километрах в час. Чтобы получить время (как это требуется) в минутах, необходимо полученный результат умножить на 60 (количество минут в часе).
Определение ветра в полете. В рассмотренной задаче предполагалось, что ветер уже известен. Действительно, если задача решается во время предполетной подготовки, то используются прогностические скорость и направление ветра, полученные от метеорологов. Однако прогноз погоды по маршруту может быть неточен, и фактический ветер может значительно отличаться от прогностического. Поэтому одной из первых задач, которые решает экипаж после занятия заданной высоты, это определение фактических направления и скорости ветра.
Ветер можно определить разными способами на основе использования различных исходных данных: по двум углам сноса на различных курсах, по двум путевым скоростям и т.д. В гражданской авиации в транспортных полетах экипаж не имеет возможности произвольно менять курс только для того, чтобы измерить на этих курсах УС. Ведь ВС должно лететь по заданному маршруту. Поэтому в гражданской авиации получил распространение способ определения ветра по путевой скорости и углу сноса, измеренным на одном курсе.
Исходными данными для решения задачи являются следующие величины:
— курс полета может быть определен в полете с помощью курсовых приборов (компасов);
— истинная воздушная скорость должна быть рассчитана по измеренной в полете приборной воздушной скорости;
Путевая скорость и угол сноса могут быть непосредственно измерены в полете бортовым оборудованием (например, доплеровским измерителем скорости и сноса) или определены одним из способов, которые будут рассмотрены далее.
Необходимо найти направление и скорость ветра.
Математические соотношения, необходимые для решения данной задачи, могут быть получены с помощью рисунка (см. рис. 3.6) на котором изображен НТС с вершинами, обозначенными буквами О, А и С.
Пусть В — проекция точки А на вектор путевой скорости. Тогда из треугольника АВС имеем:
Из треугольника OAB AB=V sinα.
В свою очередь BC=OC–OB=W–Vcosα .
Величина, соответствующая отрезку ВС, называется продольной составляющей ветра. Это проекция вектора ветра на линию фактического пути (направление вектора W).
Поскольку скорость ветра обычно меньше (а часто в несколько раз меньше), чем скорость самолета, то абсолютная величина УС, как правило, невелика – единицы градусов. Лишь для малоскоростных ВС или при очень сильном ветре УС может достигать 10-20˚ . Косинусы малых углов близки к единице. Поэтому с достаточно высокой точностью можно считать, что V cos α ≈ V.
Погрешность за счет такого допущения обычно не превышает погрешностей измерения W и V. Например, если V=500 км/ч, а угол сноса 5°, то cos5° = 0,996, Vcos α = 498 км/ч. Разность (2 км/ч) в несколько раз меньше цены деления на шкале указателя скорости.
В связи с этим на практике при расчете ветра обычно принимают:
BC=OC–OB=W–Vcosα ≈W–V =Uэкв .
Разность путевой и истинной скоростей называется эквивалентным ветром и будет рассмотрена дальше.
Подставив полученные выражения для АВ и ВС в формулу получим:
Также из треугольника ОАВ (рис. 3.6) можно записать:
а из треугольника АВС: AB=Usinε.
Приравняв эти выражения и поделив обе части соотношения на произведение VU, получим:
Полученные выражения легко реализуются на калькуляторе и на НЛ-10М.
Рассмотрим ключ для решения задачи на навигационной линейке (рис. 3.12). На шкале 5 визирка устанавливается на Uэкв и движок перемещается так, чтобы с ним совпало значение УС на шкале 3 (синусов). Затем визирка перемещается на значение истинной скорости V по шкале 5 и напротив него по шкале 4 (тангенсов) отсчитывается так называемый острый угол ветра ε* (рис. 3.12, а). Дело в том, что на шкале тангенсов невозможно установить угол более 90° (а точнее, более 85°). Калькулятор при выполнении операции взятия арктангенса тоже выдает главное значение угла, то есть не превышающее по модулю 90°. Это значение и называют острым углом ветра. Затем (вторая часть ключа) движок перемещается так, чтобы на это же место (то есть напротив V) было установлено это же значение полученного ε*, но уже по шкале синусов. Вернув визирку на значение УС по шкале синусов, напротив него по шкале 5 можно отсчитать скорость ветра U (рис. 3.12, б)..
Рис. 3.12. Определение ветра
Таким образом, скорость реального ветра U уже найдена и теперь необходимо определить навигационное направление ветра. Полученный на НЛ-10 угол ε* всегда меньше 90°, поскольку в таких пределах оцифрована шкала тангенсов. Это просто острый угол между линией фактического пути (направлением вектора W) и линией, вдоль которой дует ветер. Для примера показан угол ветра и острый угол ветра для случая, когда ветер дует влево назад (рис. 3.13).
Рис. 3.13. Угол ветра и острый угол ветра
С помощью острого угла ветра ε* легко определить навигационное направление ветра. При этом целесообразно опираться не на формальные правила и формулы, а на здравый смысл и пространственное представление.
Первоначально необходимо определить направление полета, то есть фактический путевой угол βф, поскольку именно от этого направления отсчитывается ε. Очевидно, что: 84
Затем необходимо определить (с точностью до четверти) в каком направлении дует ветер относительно направления полета – вперед или назад, влево или вправо. Это ключевой момент в решении задачи, но он не представляет сложности.
Если путевая скорость W больше воздушной скорости V, то есть относительно земли ВС движется быстрее, чем относительно воздушной массы, значит ветер попутный, «помогает» полету, то есть дует вперед. В противном случае (W 0, то ветер дует вправо. Следовательно, вектор ветра лежит во II четверти, если отсчитывать четверти от направления ЛФП по часовой стрелке (см.рис. 3.14). В этом случае острый угол ветра ε* отсчитывается от направления, противоположного направлению W, то есть:
ФМПУ±180 = 320 –180=140°.
Поскольку вектор ветра расположен от этого направления в сторону против часовой стрелки, то направление ветра будет меньше на величину ε* :
Элементы навигационного треугольника скоростей
www.livit.ru
ГЛАВНАЯ
СТРОИМ САМИ
РАСЧЕТ АВТОЖИРА
САМОЛЕТОВОЖДЕНИЕ
ПОЛЕЗНЫЕ ССЫЛКИ
Контакты | RSS 2.0
Летательные аппараты » Самолетовождение » Навигационные элементы полета и их расчет » Навигационный треугольник скоростей, его элементы и их взаимозависимость
Теория и расчет автожира
Обзор развития автожира
Теория ротора
Аэродинамический расчет автожира
Устойчивость и балансировка автожира
Строим сами летающие модели
Воздушные змеи
Воздушные шары
Модели планеров
Самолеты с резиновым мотором
Кордовые модели самолетов
Самолеты с электродвигателем
Модели вертолетов
Модели ракет
Организация работы кружка
Советы авиамоделисту
Самолетовождение
Сокращенные обозначения и условные знаки, принятые в самолетовождении
Основы авиационной картографии
Навигационные элементы полета и их расчет
Безопасность самолетовождения. Штурманская подготовка и правила выполнения полета
Самолетовождение с использованием угломерных радиотехнических систем
Самолетовождение с использованием радиолокационных и навигационных систем
Полеты в особых условиях
Партнеры
Наш опрос
Построили ли Вы что нибудь сами?
Строительное оборудование
Тепловые Пушки от сайта бесплатных объявлений
Архив новостей
Февраль 2016 (294)
Статьи
» Способы определения путевой скорости в полете Путевая скорость в полете может быть определена одним из следующих способов:1) по известному ветру (на НЛ-10М, расчетчике, ветрочете и в уме);2) по времени пролета известного расстояния (по отметкам места самолета);3) по времени пролета расстояния, определяемого с помощью самолетного радиолокатора или радиотехнических систем;4) по высоте полета и времени пробега визирной точкой и .
» Пилотажный электролет Тем, кому работа над моделями с электродвигателем покажется интересной, предлагаем построить «пилотажку» (рис. 47), разработанную Ю. Павловым. Эта модель несколько сложнее описанных ранее, но и возможности ее шире, да и энерговооруженность выше. Подкупает и внешняя форма модели, напоминающая настоящий самолет. Крыло склеивают из пластин упаковочного пенопласта. Можно также вырезать его из ц .
» Выход на линию заданного пути Выход на ЛЗП — важный этап работы экипажа. Он заключается в определении такого курса следования, при выдерживании которого фактический путевой угол был бы равен заданному путевому углу или отличался от него не более чем на 2°. В зависимости от навигационной обстановки курс следования может определяться одним из следующих способов: 1) по прогностическому или шаропилотному ветру; 2) по в .
» Определение остаточной радиодевиации и составление графика радиодевиации Остаточная радиодевиация определяется с целью обнаружения ошибок и неточностей, допущенных в процессе выявления и компенсации радиодевиации. Для определения остаточной радиодевиации самолет последовательно устанавливается на 24 ОРК, на каждом ОРК определяется КУР и вычисляется радиодевиация, которая записывается в протокол. Радиодевиация считается скомпенсированной, если на КУР = 0° она равна н .
» Особенности самолетовождения в условиях грозовой деятельности Условия самолетовождения в зоне грозовой деятельности. Грозы являются опасными явлениями погоды для авиации. Опасность полетов в условиях грозовой деятельности связана с сильной турбулентностью воздуха и возможностью попадания молнии в самолет, что может вызвать его повреждение, поражение экипажа и вывод из строя оборудования. Наиболее опасными являются фронтальные грозы, которые ох .
» Пилотажный змей «Акробат» Пилотажный змей «Акробат» (рис. 10) сконструировал москвич А. Милорадов. Основа змея — дельтавидное крыло. От классического крыла Рогалло «Акробат» отличается удлиненной центральной рейкой. Это сделано для повышения продольной устойчивости. Угол между боковыми рейками-лонжеронами составляет 156° и является оптимальным. Поперечную устойчивость обеспечивают приподнятые относительно цент .
» Предполетная проверка КС-6 Для проверки КС в режиме «МК» необходимо: 1. Включить курсовую систему. 2. Установить на УШ и КМ-4 магнитное склонение, равное нулю. 3. Установить переключатель режимов работы на пульте управления в положение «МК». 4. Установить переключатель «Осн. — Зап.» в положение «Осн.». 5. Через 5 мин после включения КС нажать кнопку быстрого согласования и согласовать указатели, ко .
» Контроль и исправление пути при полете от радиолокатора и на радиолокатор Наземные радиолокаторы позволяют вести контроль пути по направлению. При полете от радиолокатора контроль и исправление пути осуществляется в следующем порядке: 1. Запросить у диспетчера место самолета. 2. Перевести полученный азимут в МПС, сравнить его с ЗМПУ и определить боковое уклонение МПС = А — (± Δм); БУ = МПС — ЗМПУ. В тех случаях, когда угол схождения между мериди .
» Обозначения Размеры автожираСкорости и углы.
» Расчет общего запаса топлива с помощью графика Для каждого полета рассчитывают количество топлива, необходимое для заправки самолета. При этом исходят из того, что полет по трассе включает в себя следующие этапы: взлет и маневрирование в районе аэродрома взлета для выхода на линию заданного пути; набор заданного эшелона; горизонтальный полет на заданном эшелоне по маршруту; снижение до высоты начала построения маневра захода на посадку; ма .
» Конические проекции Конические проекции получаются в результате переноса поверхности Земли на боковую поверхность конуса, касательного к одной из параллелей или секущего земной шар по двум заданным параллелям. Затем конус разрезается по образующей и разворачивается на плоскость. Конические проекции в зависимости от расположения оси конуса относительно оси вращения Земли могут быть нормальные, поперечные и косые. .
» Определение навигационных элементов на контрольном этапе Для ведения контроля пути нужно знать фактическую путевую скорость и угол сноса. При отсутствии на самолете навигационных средств для автоматического измерения этих элементов последние могут быть определены на контрольном этапе. Длина контрольного этапа берется не менее 50—70 км. Его входной и выходной ориентиры выбираются с учетом надежности их опознавания с высоты полета. На контрольно .
» Сокращенные обозначения и условные знаки, принятые в самолетовождении Точки и линииМС — место самолета ИПМ — исходный пункт маршрута ППМ — поворотный пункт маршрута КО — контрольный ориентир КЭ — контрольный этап ЛЗП — линия заданного пути ЛФП — линия фактического пути АЛП — астрономическая линия положения РНТ — радионавигационная точка ОПРС — отдельная приводная радиостанция РСБ .
» Магнитные поля, действующие на картушку компаса, установленного на самолете На картушку магнитного компаса, установленного на самолете, действуют следующие поля: 1) магнитное поле Земли (оно стремится направить стрелку магнитного компаса по магнитному меридиану); 2) постоянное магнитное поле самолета; 3) переменное магнитное поле самолета; 4) электромагнитное поле, создаваемое работающим электро- и радиооборудованием самолета.
» Теория ротора Удачное развитие конструкции автожира повело к теоретическим изысканиям по несущему авторотирующему винту-ротору. Так, например, в 1926 г. появилась работа Пистолези. В 1927 г. была опубликована Глауэртом теория автожира. В 1928 г. ее развил и дополнил Локк. Можно также указать на несколько работ итальянских аэродинамиков (Ферарри, Цистолези, Уго-де-Кариа), относящихся к работе винта в боковом пот .
» Установка самолета на заданный магнитный курс Для определения девиации компаса необходимо знать, каков магнитный курс самолета, и сравнить его значение с компасным курсом, так как Δк = МК — КК. Самолет устанавливается на заданный МК: 1) пеленгованием продольной оси самолета; 2) по магнитному пеленгу ориентира.
» Подготовка к проведению радиодевиационных работ Подготовка к проведению радиодевиационных работ включает: 1. Подготовку девиационного пеленгатора, бланков протоколов выполнения радиодевиационных работ и бланков графиков. 2. Выбор для выполнения радиодевиационных работ площадки, удаленной не менее чем на 150—200 м от стоянок самолетов, строений и линий высоковольтных передач. Площадка должна быть горизонтальной, в направле .
» Предполетная штурманская подготовка Предполетная штурманская подготовка организуется и проводится командиром корабля перед каждым полетом с учетом конкретной навигационной обстановки и метеорологических условий, складывающихся непосредственно перед вылетом. В этот период каждый член экипажа выполняет по своей специальности перечень обязательных действий в соответствии с Инструкцией по организации и технологии предполетной подгот .
» Требования безопасности самолетовождения Обеспечение безопасности полета является одной из главных задач самолетовождения. Она решается как экипажем, так и службой движения, которые обязаны добиваться безопасности полета каждого самолета даже в тех случаях, когда принятые для этого меры повлекут за собой нарушение регулярности или снижение экономических показателей полета.
» Полет от радиостанции Полет от радиостанции в заданном направлении может быть выполнен в том случае, если она расположена на ЛЗП в ИПМ, ППМ или контрольном ориентире. В этом случае полет осуществляется одним из следующих способов: с выходом на ЛЗП; с выходом в КПМ (ППМ). Пеленги, определяемые при полете от радиостанции, можно использовать для контроля пути по направлению.
» Игры и соревнования Одно из доступных и простых — соревнование иа время полета моделей с парашютом. Если позволяют условия, можно проводить несколько запусков-туров, если нет — ограничиться одним. Продолжительность фиксируемого полета — время с момента взлета модели до момента посадки или до того момента, когда она скроется из поля зрения. Участник, модель которого покажет нан-большее время пол .
» Длина дуги меридиана, экватора и параллели Зная радиус Земли, можно рассчитать длину большого круга (меридиана и экватора): S = 2πR= 2·3,14·6371≈40000 км. Определив длину большого круга, можно рассчитать, чему равна длина дуги меридиана (экватора) в 1° или в 1ґ: 1 ° дуги меридиана (экватора) = = =111 км. 1ґ дуги меридиана (экватора) = = 1,852 км = 1852 м.
» Ракетомодельный спорт В ракетомодельном спорте, также как и в авиамодельном, правила соревнований вырабатывает соответствующая международная федерация. Национальные федерации, принимая свой спортивный кодекс, стараются дублировать международные правила — раздел «Космические модели» кодекса ФАИ. Но каждая страна вправе внести какие-либо нововведения, уточнения, не изменяя при этом основополагающие требования .
» Коробчатый воздушный змей Коробчатый змей (рис. 4). Для его изготовления необходимы три основные рейки диаметром 4,5 мм и длиной 690 мм и 12 коротких реек сечением 3X3 мм и длиной 230 мм. Короткие рейки заостряют и вставляют на клею в основные под углом 60°. Оклеивают змей папиросной бумагой. Масса его 55—60 г.
» Модель планера А-1 «Пионер» Модель планера А-1 «Пионер» (рис. 26). Данный планер относится к категории спортивных моделей и существенно отличается от описанных ранее. С ним можно выступать на соревнованиях почти всех рангов и выполнять нормативы для присвоения спортивных разрядов. Разумеется, изготовление такой модели под силу лишь авиамоделистам, имеющим опыт конструирования и определенные навыки в работе. Для построй .
» Расчет истинной воздушной скорости по узкой стрелке КУС Узкая стрелка КУС связана с дополнительным механизмом, состоящим из блока анероидных коробок, который автоматически вводит методическую поправку на изменение плотности воздуха с высотой полета, если температура воздуха изменяется с высотой в соответствии со стандартной атмосферой. Поэтому при температуре на высоте полета, не соответствующей расчетной, узкая стрелка будет указывать истинную скоро .
» Проверка правильности остаточной радиодевиации в полете В полетах штурман должен использовать каждую возможность для проверки правильности остаточной радиодевиации. Наиболее простой и удобный способ проверки — это сравнение фактического и полученного по радиокомпасу пеленгов радиостанции. Для этого необходимо:
» Игры и соревнования. Воздушный «почтальон» С воздушными змеями в пионерском лагере можно проводить разнообразные игры и соревнования — на скорость сборки и запуска на леере определенной длины, на высоту подъема. Особенно большой интерес вызывает запуск воздушных змеев с применением «почтальонов». Воздушные «почтальоны»— приспособления, которые под напором ветра скользят вверх по лееру. Такой лист скользит по лееру вверх .
» Модель конструкции авиамоделистов из г. Барановичи Модель конструкции авиамоделистов из г. Барановичи (рис. 41). Интересную модель из пенопласта разработали белорусские строители малой авиации. Облегчение крыла за счет сквозных отверстий позволило создать достаточно технологичную и легкую «бойцовку».
» Змей-вертушка Змей-вертушка (рис. 3). В основе полета этого змея «эффект Магнуса». Что это такое? В 1852 году немецкий ученый Г. Магнус обнаружил эффект обтекания воздухом вращающейся трубы: воздушная струя, обтекающая трубу поперек ее оси, отклоняется в направлении вращения. Если разрезать трубу (цилиндр) вдоль оси пополам и сместить обе половинки друг относительно друга, получится вертушка. Цилиндр будет .
Наши друзья
Сделай сам своими руками tehnojuk.ru . Техножук от ветродвигателя до рентгеновского аппарата.
Навигационный треугольник скоростей, его элементы и их взаимозависимость
Самолетовождение » Навигационные элементы полета и их расчет | Просмотров: 75727
Рис. 7.3. Навигационный треугольник скоростей и его элементы
Вектором путевой скорости называется направление и скорость движения самолета относительно земной поверхности. Его направление определяется путевым углом, а величина — значением путевой скорости. Вектором ветра называется направление и скорость движения воздушной массы относительно земной поверхности. Его направление определяется направлением ветра, а величина — значением его скорости. Навигационный треугольник скоростей имеет следующие элементы: МК — магнитный курс самолета; V — воздушная скорость; МПУ— магнитный путевой угол (может быть заданным —ЗМПУ и фактическим — ФМПУ); W — путевая скорость; НВ — навигационное направление ветра; U — скорость ветра; УС — угол сноса; УВ — угол ветра. Фактическим магнитным путевым углом называется угол, заключенный между северным направлением магнитного меридиана и линией фактического пути. Отсчитывается от северного направления магнитного меридиана до линии фактического пути по ходу часовой стрелки от 0 до 360°. Углом сноса называется угол, заключенный между продольной осью самолета и линией пути. Отсчитывается от продольной оси самолета до линии пути вправо со знаком плюс и влево со знаком минус. Углом ветра называется угол, заключенный между линией пути (фактической или заданной) и направлением навигационного ветра. Отсчитывается от линии пути до направления ветра по ходу часовой стрелки от 0 до 360°. Между элементами навигационного треугольника скоростей существует следующая зависимость: МК = МПУ — (± УС); ОС = V cos УС; МПУ = МК + (± УС); CB = U cos УВ; УС = МПУ-МК; W = VсоsУС + UсоsУВ; УВ = δ ± 180° — МПУ; δ = МПУ + УВ ± 180°. Так как углы сноса обычно небольшие, а косинусы малых углов близки к единице, то можно считать, что W ≈ V+UсоsУВ. Приведенные выше формулы используются для расчета элементов навигационного треугольника скоростей. Угол сноса и путевая скорость являются основными навигационными элементами, поэтому нужно твердо знать, как они зависят от изменения воздушной скорости, скорости ветра и угла ветра. Зависимость угла сноса и путевой скорости от воздушной скорости самолета. При неизменном ветре и курсе самолета путевая скорость изменяется соответственно изменению воздушной скорости, т. е. с увеличением воздушной скорости путевая скорость становится больше, а с уменьшением — меньше (рис. 7.4). Считают, что изменение воздушной скорости вызывает пропорциональное изменение путевой скорости, т. е. насколько изменилась воздушная скорость, настолько соответственно изменится и путевая скорость.
Навигационный треугольник скоростей
Влияние ветра на полет проявляется в том, что относительно земной поверхности вертолет перемещается не в направлении своей продольной оси и не со скоростью, создаваемой двигательной установкой, — его перемещение является следствием двух движений (рис. 5.2): относительно воздуха за счет тяги несущего винта в направлении продольной оси с истинной воздушной скоростью F; вместе с воздушной массой в сторону, куда дует ветер со скоростью U.
Точкой приложения векторов является центр масс вертолета. В итоге движение вертолета относительно_земной_ поверхности будет происходить в направлении вектора w=Y+U. Направление этого вектора определяет линию пути вертолета, а модуль w—величину путевой скорости. Если перенести вектор ветра,
являющийся свободным, в конец вектора воздушной скорости, получим треугольник скоростей (рис. 5.3). В зависимости от условий полета (набор высоты, снижение и т. п.) этот треугольник может находиться в разных плоскостях. Для простоты изложения и по
лучения без погрешностей скорости вертолета относительно земли (W) рассматривают его проекцию на горизонтальную плоскость.
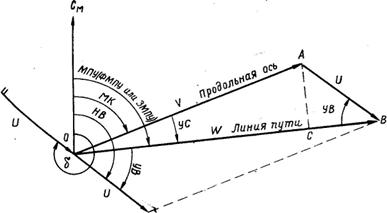
Проекция векторного треугольника скоростей на горизонтальную плоскость называется навигационным треугольником скоростей (НТС).
Элементами НТС являются; МК — магнитный курс вертолета; V — истинная воздушная скорость; НВ — навигационное направление ветра; U — скорость ветра; УС — угол сноса; ПУ — путевой угол (может быть заданным — ЗПУ и фактическим — ФПУ); W—путевая скорость; УВ — угол ветра; КУВ — курсовой угол ветра.
Путевой угол измеряется по ходу часовой стрелки от меридианов, принятых за начало его отсчета, до линии пути. Он может быть магнитным (МПУ), истинным (ИПУ), ортодромичес — ким (ОПУ) или условным (УПУ).
Угол сноса — угол, отсчитываемый от вектора воздушной до вектора путевой скорости. При отклонении вектора путевой скорости вправо от вектора воздушной скорости УС имеет знак плюс, при отклонении влево — минус. Его получают путем расчета или определяют с помощью технических средств.
Угол ветра — угол, отсчитываемый от вектора путевой скорости до вектора ветра от 0 до 360°. При отсчете вправо (по ходу часовой стрелки) ему приписывается знак плюс. Он может быть отсчитан и влево (против хода часовой стрелки), в этом случае ему следует приписать знак минус. УВ используется при решении НТС, он рассчитывается летчиком.
Курсовой угол ветра — угол, отсчитываемый от вектора воздушной скорости до вектора ветра. КУВ рассчитывается летчиком.
Таким образом, в НТС входят три вектора скорости, а также УВ, УС и КУВ. Они характеризуют направление и скорость движения вертолета относительно воздушной массы и земной поверхности. Одни из элементов определяются заданием (ЗМПУ, V), другие — фактическими условиями полета (НВ, U), третьи рассчитываются летчиком или определяются с помощью технических средств (УВ, УС, W, МК, КУВ). Нахождение неизвестных значений этих элементов есть решение НТС.
Для вывода формул, обеспечивающих это решение, установим зависимость его элементов. Из рис. 5.3 видно, что
МК = ЗМПУ — (± УС); Ї (5 2)
Угол сноса и путевую скорость найдем, воспользовавшись теоремой синусов: V/sin yB=£//sin yc=№7sin [180°—(УВ + УС)],
V sin (УВ + УС) sin УВ
Углы сноса сравнительно невелики, синусы их можно заменить величиной угла, выраженной в радианах. Приняв радиан приближенно равным 60°, получим значение УС в градусах и его макси-
Изменение УС и W при изменении УВ (направления полета или ветра) и неизменной V можно проследить по табл. 5-1, составленной с использованием формул (5.4) и (5.5). При 0^ ^ УВ ^ ± 180° УС изменяется от 0 до ±УСМ[1] и вновь прихо-
Рис. 5.5. Изменение W и УС при изменении скорости ветра
дит к нулю, a W — от V+U при попутном ветре до V—U при встречном, при УВ = ± 90° W « V (ветер боковой). Строго говоря W= V при УВ = ±90° — УСм/2 [и при УС = 0 в безветрие — см. формулу (5.3)]. Практические выводы из табл. 5.1: при попутном или встречном ветре даже небольшие изменения УВ вызывают существенные изменения УС, для следования по ЛЗП это потребует изменения курса; при этом W почти не меняется; при УВ « ± 90°, наоборот, существенно изменяется W и требуется перерасчет времени полета на этапе, а УС изменяется незначительно; при УВ « ± 45° (или »±135°) небольшие изменения УВ вносят лишь незначительные изменения в УС и W.
Изменение УС и W при изменении скорости ветра, когда курс, V и направление ветра неизменны, можно проследить по формулам (5.4) и (5.5): увеличение скорости ветра ведет к увеличению УС и, как результат, к уклонению вертолета от ЛЗП по ветру (рис. 5.5), а уменьшение скорости ветра — к уклонению в навет ренную сторону; на W влияет косинусная составляющая вектора ветра, направленная по ЛЗП, при УВ ±90° — к ее уменьшению; при уменьшении скорости ветра зависимости обратные.
Изменение УС и W при изменении воздушной скорости, когда ветер и курс неизменны, показано на рис. 5.6: УС при увеличении
воздушной скорости уменьшается, а при уменьшении увеличивается на величину АУС = YCiAV/’Vi; путевая скорость изменяется почти на такую же величину, как и воздушная, поэтому в процессе маневрирования скоростью можно считать, что Wz
Рис. 5.7. Изменение IF и УС при изменении курса:
о —положение векторов HTC при разных курсах полета; б — HTC после совмещения век- торов V
где AV=V2—Vi. Чтобы парировать уклонение вертолета с ЛЗП, при уменьшении V необходимо дозорачивать его на АУС в наветренную сторону, а при увеличении V — по ветру.
Изменение УС и W при изменении курса на величину А К, когда V и ветер остаются неизменными, показано на рис. 5.7. Формулы для определения величин их изменения можно получить, раз- вернув навигационный треугольник скоростей 0АВ вокруг точки А до совмещения векторов воздушной скорости. Тогда
А УСК = АК cos УВ; 1,7ДК sin УВ.
Из формул видно, что величина изменения УС и W при изменении курса зависит не только от изменения курса (ДК), но и от отношения U/V и угла ветра. При полете в плоскости ветра, изменяя курс, следует уточнять УС, а при боковом ветре — W.
В маршрутном полете при выдерживании расчетных данных уклонение вертолета от ЛЗП или изменение времени полета на этапе могут быть следствием изменения ветра. В связи с этим экипаж должен периодически в полете определять фактические УС и W. Согласно проведенным исследованиям при скоростях полета 200—300 км/ч повторные измерения их следует производить весной и летом примерно через 40—50 мин, осенью и зимой через 20—25 мин. При полете вблизи воздушных фронтов — еще чаще. Изменения в курс и время полета вносятся на величину расхождений УС и W с расчетными. Изменяя курс, скорость или высоту, надо представлять, как от этого изменится НТС, и принимать меры к совмещению вектора W с ЛЗП.
При выполнении некоторых расчетов в целях упрощения учета ветра и повышения оперативности их выполнения используется понятие эквивалентного ветра.
Эквивалентный ветер U3 — ветер условный. Представляет собой составляющую фактического вектора ветра, направленную по ЛЗП (иэ ^ U cos УВ). Создает такую же путевую скорость, как и фактический ветер: W = V ± С/э. Используется он при выполнении расчетов дальности и радиуса полета.







 Летательные аппараты » Самолетовождение » Навигационные элементы полета и их расчет » Навигационный треугольник скоростей, его элементы и их взаимозависимость
Летательные аппараты » Самолетовождение » Навигационные элементы полета и их расчет » Навигационный треугольник скоростей, его элементы и их взаимозависимость






 V sin (УВ + УС)
V sin (УВ + УС)




