Обработка радиолокационной информации (РЛИ) включает определенную последовательность действий:
- наблюдение и обнаружение целей;
- глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
- радиолокационную прокладку – определение элементов движения цели и параметров ситуации сближения;
- расчет маневра расхождения;
- контроль за изменением радиолокационной ситуации во время маневра до полного расхождения судов.
Наблюдение и обнаружение целей.
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море постоянное наблюдение следует вести на шкалах среднего масштаба 8-16 миль с периодическим просмотром обстановки на шкалах как более мелкого, так и более крупного масштабов.
Радиолокационная прокладка на маневренном планшете.
Относительная прокладка – выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора – насколько опасна наблюдаемая цель. Степень опасности оценивается по двум критериям:
- Дкр – дистанция кратчайшего сближения — минимальное расстояние, на которое цель может приблизиться к нашему судну, если никто не будет изменять элементы своего движения (курс и скорость);
- tкр – интервал времени до точки кратчайшего сближения — интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр , тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции кратчайшего сближения.
Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так, ситуация обгона, как правило, менее опасна чем расхождение на встречных курсах, даже если Дкр в первом случае меньше, чем во втором.
В районах интенсивного судоходства ручная прокладка на маневренном планшете отвлекает от наблюдения и может выполняться только при усилении ходовой навигационной вахты.
- Построение треугольника скоростей
- Маневр расхождения курсом
- Глазомерная оценка радиолокационной ситуации
- Использование САРП при расхождении
- Основные функции САРП
- Основные ограничения САРП
- Использование САРП при расхождении судов
- Стандартные символы и сокращения, применяемые в САРП
- Использование АИС для расхождения
- Действия экипажа до и после столкновения судов
- Общие положения
- Угроза загрязнения
- Выбор и обоснование маневра для расхождения в заданной дистанции
- Использование радиолокатора для расхождения
- Маневр расхождения курсом
- Маневр расхождения скоростью
Построение треугольника скоростей
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.
Пошаговые действия для оценки ситуации (рис. 1):
- В центр планшета наносится вектор скорости нашего судна, равный 6-минутному отрезку (например, скорость нашего судна 15 узлов, откладываем по курсу 1, 5 мили).
- Делаются замеры пеленга и дистанции встречного судна.
- В таблицу записываются данные измерения и на планшет наносится первая точка – А1.
- В полученную точку параллельно переносится и «втыкается» вектор скорости нашего судна.
- Через 3 минуты повторяются пункты 2-3, наносится вторая точка А2. Приближенно оценивается ситуация сближения.
- Еще через 3 минуты повторяются пункты 2-3, наносится третья точка Аз.
- Соединив точки А1 – А2 – А3, получаем линию относительного движения – ЛОД.
- Из начала нашего вектора скорости строим вектор Vв , который является вектором истинной скорости и курса встречного судна.
- Перпендикуляр, проведенный из центра планшета к ЛОД, определяет Дкр (в нашем случае Дкр = 1,7 мили). Величину Ср находим, откладывая по ЛОД отрезки, равные V0 до Дкр (здесь, примерно, укладывается 1,5V0 , т. е. tкр = 1,5 x 6 мин = 9 мин).
- Принимается решение по выбору маневра расхождения.
 Рис. 1 Построение треугольника скоростей
Рис. 1 Построение треугольника скоростей
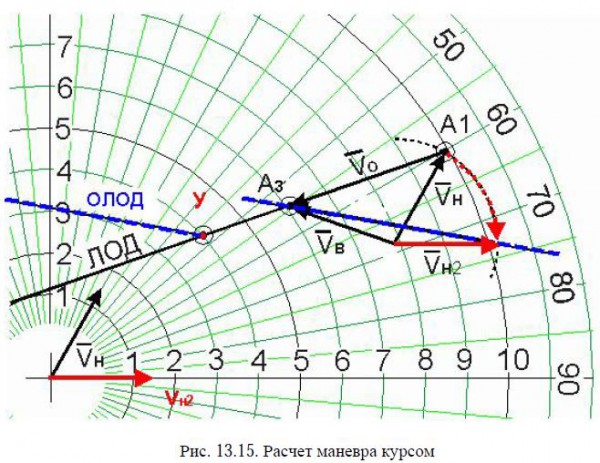
Маневр расхождения курсом
- Необходимо на ЛОД нанести упреждающую точку «У» положения цели в момент начала нашего маневра. Обычно это 6-минутный интервал (расстояние А1 – Аз).
- Из точки «У» проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
- Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
- Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
- Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.
Рис. 2 Расчет маневра расхождения курсом
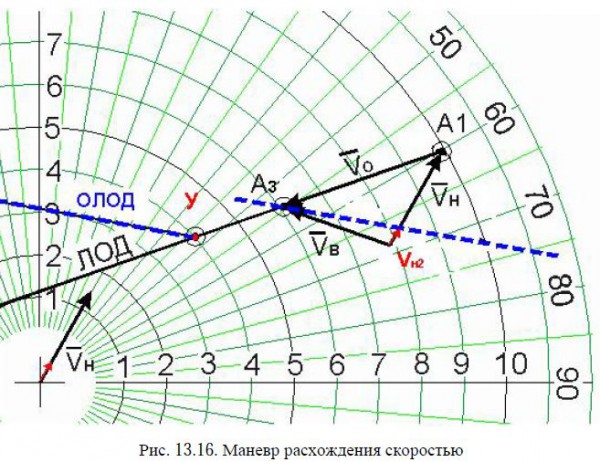
Маневр расхождения скоростью:
- Необходимо на ЛОД нанести упреждающую точку «У» – положение цели в момент начала нашего маневра.
- Из точки «У» проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
- Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
- ОЛОД «отсекает» часть вектора нашего судна. Отрезок от начала вектора до точки пересечения с ОЛОД откладываем на векторе в центре планшета. Это и есть новая скорость нашего судна, необходимая для расхождения на заданной дистанции.
- Снижение скорости необходимо начинать заранее – до наступления момента «У», с тем, чтобы в этот момент судно уже имело новую скорость.
Рис. 3 Расчет маневра расхождения скоростью
Маневр расхождения скоростью применим для судов водоизмещением до 20 000 тонн. В любом случае, при выполнении маневра расхождения необходимо учитывать маневренные характеристики судна.
При выборе маневра расхождения с опасной целью, когда на экране наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для всех потенциально опасных судов. Как правило, на планшет наносится полный анализ ситуации до момента окончания маневра и возвращения к исходным параметрам движения вашего судна.
Глазомерная оценка радиолокационной ситуации
Глазомерная оценка является обязательным этапом обработки РЛИ и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхосигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного движения (ЛОД), по которой определяют дистанцию кратчайшего сближения Дкр .
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т. е. имеет достаточный навык работы на маневренном планшете.
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие четыре начальные ситуации (рис. 4).
Рис. 4 Экран радиолокатора в режиме относительного движения:
судно 1 пересекает курс по носу в опасной близости; 2 – следует курсом и скоростью нашего судна (сателлит); 3 – пересекает курс по корме; 4 – обгоняющее судно
Использование САРП при расхождении
Средства автоматической радиолокационной прокладки (САРП) – это радиолокационные информационно-вычислительные комплексы, обеспечивающие автоматизацию обработки радиолокационной информации и информации от гирокомпаса и лага.
При работе с САРП судоводитель освобождается от операции ручного съема радиолокационных пеленгов и дистанций целей и их графической прокладки на радиолокационном планшете. Указанные операции выполняются в автоматическом режиме на экране индикатора. Это позволяет судоводителю уделять основное внимание вопросам наблюдения, оценки ситуации сближения, выбора и выполнения маневра для безопасного расхождения и контроля его эффективности.
В то же время грамотное и полное использование возможностей САРП основано на четком представлении о принципе работы, а, следовательно, функциональных возможностях и ограничениях САРП, а также погрешностях выдаваемой информации в различных ситуациях расхождения и внешних условиях плавания. В противном случае риск столкновения при использовании САРП для расхождения становится существенно выше, чем при ручной радиолокационной прокладке.
Основные функции САРП
САРП выполняют все функции РЛС по отображению на экране радиолокационной обстановки. Дополнительные, по сравнению с РЛС, функциональные возможности САРП обеспечивают выполнение следующих процедур:
- автоматическое обнаружение эхо-сигналов надводных целей;
- ручной или автоматический захват целей на сопровождение;
- одновременное автоматическое сопровождение не менее 20-ти целей;
- непрерывное автоматическое определение элементов движения (курса и скорости) и элементов сближения (дистанции и времени кратчайшего сближения) для всех сопровождаемых целей;
- проигрывание маневра расхождения со всеми находящимися на автосопровождении целями;
- обнаружение маневра цели;
- звуковая и световая предупредительная сигнализация о появлении новой и опасной цели; потеря цели, в том числе опасной; начало маневра цели; сближение с целью на установленное предельное расстояние; неисправное функционирование САРП и т. д.
Основные ограничения САРП
Поскольку САРП обеспечивает автоматическую обработку сигналов РЛС, то все ограничения радиолокатора входят как составная часть в ограничения САРП и их необходимо учитывать при расхождении.
Траулер Argos Vigo
Алгоритмы обработки информации, реализованные в САРП, накладывают дополнительные ограничения:
- не обеспечивает гарантированного обнаружения и захвата на автосопровождение всех целей, в том числе и опасных;
- при неустойчивом эхо-сигнале (малые суда, сопровождение в условиях помех) может произойти сброс цели и информация по ней выдаваться не будет. При близком расхождении двух целей возможна потеря одной цели. В этом случае другая цель будет иметь два вектора, один из которых будет ложным;
- сигналы РЛС, гирокомпаса и лага поступают в САРП с погрешностями. При бортовой качке судна, наличии помех, маневрировании и рыскании собственного судна погрешности датчиков увеличиваются. Поэтому при вычислении элементов движения цели и параметров ситуации сближения используется «сглаживание», что приводит к задержке выдачи достоверных данных до трех минут с момента взятия цели на сопровождение.
Погрешности вычисленных элементов движения цели и параметров ситуации могут достигать в:
- истинном курсе цели – ±5 – 7°;
- истинной скорости цели – ±1,2 уз;
- дистанции кратчайшего сближения – ±0,7 мили;
- времени кратчайшего сближения – ±1 мин.
Маневр цели обнаруживается со значительным запозданием, а данные, выдаваемые САРП по маневрирующей цели, будут ненадежны в течение 3-4 мин. после его окончания. При маневрировании собственного судна выдаваемая САРП информация по всем сопровождаемым целям будет ненадежна не менее 1 мин. после окончания маневра.
Использование САРП при расхождении судов
Полная оценка ситуации возможна только с помощью анализа как первичной (необработанные эхо-сигналы целей), так и вторичной (векторы и цифровые данные) информации.
Анализ первичной информации для выбора целей для захвата производится глазомерной оценкой следов послесвечения целей так же, как и при ручной радиолокационной прокладке. В первую очередь, для автоматического сопровождения выбираются опасные и потенциально опасные цели.
Траулер Punta Alijbe
По вторичной информации оценивается степень опасности ситуации. При радиолокационном наблюдении с применением САРП судоводитель использует следующие данные для оценки степени опасности ситуации сближения:
- расположение вектора ОД относительно собственного судна;
- значения Dкр и tкр ;
- курсовой угол, ракурс (в режиме истинного движения) и дистанция до цели;
- характер изменения пеленга на цель.
Дополнительную полезную информацию для оценки ситуации и выбора маневра может дать прогнозирование развития ситуации путем изменения длины векторов цели. При оценке степени опасности ситуации необходимо также учитывать положения Правила 7 МППСС-72.
Выбор маневра для безопасного расхождения надлежит осуществлять заблаговременно и решительно в строгом соответствии с МППСС-72, сообразуясь с конкретными обстоятельствами ситуации сближения и условиями плавания и согласно рекомендациям хорошей морской практики. Следует помнить, что даже решительный маневр сможет быть обнаружен другим судном при использовании САПР только через 3-4 минуты после его начала.
После выбора маневра расхождения проводится его проигрывание (имитация) в заданное судоводителем время начала маневра (время упреждения). При имитации маневра во всех САРП ситуация рассчитывается только для целей, находящихся на автосопровождении, и предполагается, что все они сохраняют неизменными свой курс и скорость.
При выполнении маневра необходимо внимательно следить за векторами встречных судов, включая индикацию их прошлых положений, с целью как можно более раннего обнаружения их возможного маневра. Необходимо также тщательно контролировать эффективность маневра и в случае необходимости своевременно принимать дополнительные меры обеспечения безопасности. Непрерывный и тщательный контроль за взаимным перемещением судов необходимо осуществлять до момента возвращения на прежний курс.
Стандартные символы и сокращения, применяемые в САРП
| Символы и сокращения САРП | |||
|---|---|---|---|
| Объект | Символ | Объект | Символ |
| Собственное судно | Цели САРП | ||
| Судно оператора (собственное судно) | | Цель САРП | |
| Контур нашего судна в масштабе карты | | САРП-цель с вектором скорости | |
| Место антенны нашего судна | | Цель в промежутке “захвата” | |
| Курсовая линия нашего судна | | Опасная САРП-цель (красный цвет) | |
| Траверзная линия нашего судна | | Потерянная САРП-цель | |
| Вектор скорости нашего судна | | САРП-цель в охранной зоне | |
| Стабилизация относительно воды | | Выбранная цель | |
| Стабилизация относительно грунта | | Прошлый путь САРП-цели | |
| Прогноз пути | | ||
| Прошлый путь по главному источнику | | ||
| Прошлый путь по вторичному источнику | | ||
| Сокращения САРП | |||
|---|---|---|---|
| Термины | Сокращения | Термины | Сокращения |
| Acquire — выбрать (захватить) на сопровождение | ACQ | Acquisition Zone — зона захвата целей на сопровождение | AZ |
| Aft Crossing Range – дистанция пересечения линии пути по корме | ACR | Aft Crossing Time — дистанция пересечения линии пути по корме | ACT |
| Automatic Identification System — автоматическая идентификационная система | AIS | Automatic Radar Plotting Aid — средства автоматической радиолокационной прокладки | ARPA |
| Automatic Tracking Aid — средства автосопровождения | ATA | Bearing — пеленг | BRG |
| Bow Crossing Range — дистанция пересечения линии пути по носу | BCR | Bow Crossing Time — дистанция пересечения линии пути по корме | BCT |
| Course То Steer — курс для следования | CTS | Course Over The Ground — курс относительно грунта | COG |
| Display Brilliance — яркость отображения | BRILL | Course Up — ориентация по курсу | C UP |
| Distance at Closest Point Of Approach — дистанция кратчайшего сближения | DCPA | Distance — расстояние | DIST |
| Echo Reference Speed — относительная скорость по данным РЛС | REF SOG | Electronic Bearing Line — электронный визир | EBL |
| Electroonic Navigational Chart — электронная навигационная карта | ENC | Electronic Plotting Aid — электронные средства прокладки | EPA |
| Ground Stabilized — стабилизировано по грунту | GND STAB | Guard Zone – охранная зона | GZ |
| Heading Line — линия курса | HL | Head Up — ориентация по курсу | H UP |
| Lost Target – потеря цели | LOST TGT | Manoeuvre Time — время маневра | MVR TIME |
| North Up – ориентация по корду | N UP | Own Ship – собственное судно | OS |
| Parallel Index Line – параллельные индексные линии | PI | Past Positions – последняя позиция | PAST POSN |
| Predicted Point Of Collision — предсказанная точка столкновения | PPC | Predicted Area Of Danger – предсказанная зона опасности | PAD |
| Radar – РЛС | RDR | Radar Plotting – радиолокационная прокладка | RP |
| Range Rings — неподвижные крути дальности | RR | Relative Course – относительный курс | R CSE |
| Relative Motion — относительное движение | RM | Relative Motion (Relative Trails) — стабилизация изображения по СО и следы относительного движения | RM (R) |
| Relative Motion (True Trails) – стабилизация изображения по СО и следы истинного движения | RM (T) | Relative Vector – относительный вектор | R VECT |
| Speed Over The Ground – скорость относительно грунта | SOG | Speed Through The Water – скорость относительно воды | STW |
| Target – цель | TGT | Time То Closest Point Of Approach – время до точки кратчайшего сближения | TCPA |
| Trails – следы | Trial Manoeuvre – проигрывание | TRIAL | |
| True Bearing – истинный пеленг | T BRG | True Course – истинный курс | T CSE |
| True Motion – истинное движение | TM | True Speed – истинная скорость | T SPD |
| True Vector — истинный вектор | T VECT | Variable Range Marker — подвижный маркер дальности | VRM |
| Vector – вектор | VECT | Vector Time — время вектора | VECT TIME |
Использование АИС для расхождения
Автоматическая идентификационная система (АИС) обеспечивает автоматический обмен навигационной и иной информацией, связанной с безопасностью мореплавания, между судовыми и другими станциями АИС по специальному каналу радиосвязи. Для передачи и приема информации в АИС используется транспондер УКВ диапазона, обеспечивающий дальность действия 25—30 миль в зависимости от высоты антенн.
Одной из причин появления АИС явились имеющиеся ограничения РЛС и САРП для решения задачи предупреждения столкновений судов. Главное назначение АИС – опознавание. Нельзя использовать эту систему в качестве основного источника информации при решении задач по предотвращению опасного сближения с другими судами.
Траулер Hermanos Perez Tercero
Достоинства АИС, устраняющие некоторые из таких ограничений при решении задач по предупреждению столкновений судов, сводятся к следующему:
- Дальнее обнаружение независимо от размеров цели.
- Нет теневых секторов от своих конструкций и других судов.
- Не влияют видимость, дождь и т. д.
- Обнаружение за препятствиями.
- Неограниченная разрешающая способность.
- Мгновенная выдача информации о цели.
- Высокая точность (CPA от 50 м и точнее).
- Известен ракурс цели и ее габариты.
- Быстрое обнаружение маневра цели.
- Возможность связи по УКВ (идентификация цели).
Наряду с очевидными достоинствами, АИС обладает и существенными недостатками. К ним относятся следующие:
- эффективное использование АИС возможно только при оснащении всех судов, включая малотоннажные, конвенционной аппаратурой АИС и конвенционной аппаратурой отображения информации от АИС и РЛС, позволяющей решать задачи предупреждения столкновений судов;
- АИС никогда не заменит РЛС, поскольку ее информация относится только к объектам, на которых установлены транспондеры, в то время как радиолокатор позволяет наблюдать любые объекты, отражающие радиоволны (знаки навигационного ограждения, суда, береговую черту и др.);
- внедрению на судах подлежит только то оборудование АИС, параметры которого жестко регламентированы на международной основе. В этом случае будет обеспечена совместимость оборудования, установленного на разных судах, и высокая эффективность его использования;
- судоводители должны принимать во внимание тот фактор, что на встречных судах АИС может выйти из строя или быть выключенной.
Данные любой выбранной активированной цели представляются в буквенноцифровом виде в зоне диалога вне рабочей зоны индикатора.
Для каждой выбранной активированной цели представляются данные:
- источник информации;
- идентификатор судна (номер IMO или название или позывные);
- координаты и их качество;
- рассчитанная дальность DIST;
- рассчитанный пеленг BRG;
- дистанция кратчайшего сближения CPA;
- время до кратчайшего сближения TCPA;
- путь относительно грунта COG;
- скорость относительно грунта SOG;
- навигационный статус.
Если принятая от АИС информация является неполной, она указывается в соответствующем поле как «отсутствующая».
Возможно добавление следующих данных:
- курс судна HDG;
- угловая скорость поворота.
Обязанности вахтенного помощника по обслуживанию судовой станции АИС Судовое оборудование АИС должно, как правило, всегда находиться в рабочем состоянии при нахождении судна на ходу или на якоре, за исключением случаев, когда по соображениям безопасности (угроза пиратства или вооруженного грабежа) выключается по приказу капитана с записью в судовом журнале. По исчезновению опасности судовая станция АИС должна быть включена как можно быстрее.
Порядок использование АИС судами, находящимися у причалов порта, определяется инструкциями судовладельца и местными правилами. Если по роду перевозимых грузов, в частности, на танкерах при проведении грузовых операций требуется снижение мощности или выключение VHF радиостанций – снизить мощность АИС или отключить передачу информации.
Траулер Alida
Подготовка оборудования АИС к работе после включения занимает не более 2 минут, в течение которых выполняется автоматический контроль работоспособности, периодически повторяющийся в процессе работы. Если обнаруживается неисправность, включается сигнализация, а в некоторых случаях прекращается передача информации.
При подготовке судна к отходу вахтенный помощник должен:
- проверить согласование курса HDG в АИС с гирокомпасом;
- ввести максимальную осадку, код опасного груза (или код типа судна и типа опасного груза), порт назначения и ожидаемое время прибытия, количество людей на борту, план перехода (по указанию капитана);
- проверить динамическую информацию о своем судне, изменить навигационный статус судна;
При входе судна в район, где установлены частотные каналы АИС, отличающиеся от международных, следует убедиться, что произошло автоматическое переключение каналов по сигналам береговых станций. В некоторых районах, где такие станции отсутствуют, требуется выполнить ручное переключение каналов.
Основные компоненты информации, передаваемой по каналам АИС, приведены в табл. 1.
| Таблица 1. Основные компоненты АИС | |
|---|---|
| Вид и содержание информации | Особенности информации |
| ИНМПС | Присвоенный судну идентификационный номер Морской подвижной службы. Вводится при установке аппаратуры |
| Название и позывной сигнал судна | Вводится при установке аппаратуры. Может меняться только при перерегистрации судна |
| Номер Международной морской организации | Вводится при установке аппаратуры. Изменению не подлежит |
| Тип судна | Вводится при установке аппаратуры. Изменению не подлежит |
| Длина и ширина судна | Вводится совместно с положением антенны |
| Положение антенны датчика местоположения судна | Может меняться при наличии нескольких приемных антенн |
| Тип датчика местоположения судна | Вводится при установке аппаратуры в зависимости от сопрягаемого навигационного оборудования |
| Высота над уровнем киля | Дополнительная информация о высоте мачт или других конструкций |
| Динамическая информация | |
| Координаты судна | Автоматически считываются с датчика местоположения, подключенного к аппаратуре АИС |
| Признак точности координат | Характеризует точность определения координат — хуже 10 м или лучше 10 м (при использовании дифференциального режима СНС) |
| Время определения координат | Время по шкале UTC. Автоматически считывается с датчика местоположения, подключенного к аппаратуре АИС |
| Путевой угол, путевая скорость (относительно грунта) | Автоматически считывается с приемоиндикатора СНС, подключенного к аппаратуре АИС |
| Курс | Автоматически считывается с судового курсоуказателя (гирокомпаса), подключенного к аппаратуре АИС |
| Навигационный статус судна | Вводится вручную с выбором из списка. Изменения рекомендуется делать одновременно с включением огней или с подъемом знаков, предписанных МППСС-72 (например: “судно не управляется”, “на якоре” и т. д.) |
| Угловая скорость | Скорость поворота (изменения курса). Автоматически вводится с соответствующего датчика, если он имеется на судне |
| Рейсовые данные | |
| Осадка | Вводится вручную и изменяется при необходимости |
| Опасный груз | При наличии опасного груза вводится вручную перед началом рейса |
| Пункт назначения, ожидаемое время прибытия | Вводится вручную перед началом рейса, изменяется при необходимости |
| План перехода | Определяется координатами путевых точек. Вводится вручную перед началом рейса, изменяется при необходимости |
| Количество людей на борту | Дополнительная информация. Передается по инициативе судна или запросу береговой станции |
На современных судах установлена аппаратура, где на экране одновременно «четыре в одном»: РЛС, САРП, электронная карта, АИС.
При совместном отображении информации АИС, РЛС, САРП символы целей АИС и радиолокационного сопровождения должны четко различаться друг от друга (цветом, формой или размерами), и первые не должны ухудшать наблюдение эхосигналов вторых.
| Символы АИС, РЛС, САРП и электронных карт | |||
|---|---|---|---|
| Пассивное состояние АИС-цели | | Линия курса активированной цели | |
| Активированная цель | | Индикатор поворота | |
| Контур АИС-пели в масштабе карты | | Вектор скорости активированной цели | |
| Место антенны АИС-цели | | Стабилизация: вода/грунт | Требуется указывать в пользовательском интерфейсе |
| Опасная цель (красный цвет) | | Прогноз траектории поворота | |
| Потерянная АИС-цель | | АИС-цель, курса или ГТУ или V нет | |
| Выбранная АИС-цель | | Прошлый путь АИС-цели | |
Действия экипажа до и после столкновения судов
Вахтенный помощник, убедившись, что развивается такая ситуация, что столкновение с другим судном неизбежно, должен:
- объявить общесудовую тревогу;
- по внутрисудовой трансляции предупредить экипаж о той части корпуса судна, в которую вероятнее всего придется удар другого судна;
- попытаться совершить маневр своего судна так, чтобы повреждения от столкновения были минимальными. При этом необходимо помнить, что во время перехода работы главного двигателя с переднего хода на задний судно перестает слушаться руля. Поэтому рекомендуется вначале задать перекладкой руля движение судну в нужную сторону, а затем отрабатывать задним ходом.
Рекомендуемый порядок действий после столкновения:
- при столкновении необходимо подать сигнал общесудовой тревоги;
- немедленно вызвать капитана на мостик;
- установить машинный телеграф на «СТОП», сообщить вахтенному механику о произошедшем. Если суда сцеплены вместе, то капитан не должен давать ход до тех пор, пока не будет полностью оценена ситуация;
- все суда, находящиеся в данном районе, должны быть оповещены о столкновении (УКВ – канал 16);
- все члены экипажа и пассажиры согласно расписания по тревогам должны прибыть в места сбора, где произвести перекличку и доложить на мостик. Это позволит выявить отсутствующих членов экипажа и пассажиров с тем, чтобы немедленно приступить к необходимым розыскным мероприятиям;
- в темное время суток включить палубное освещение;
- произвести полную герметизацию судна, задраить все водонепроницаемые и противопожарные двери. Выключить общесудовую вентиляцию. Старший помощник и второй механик должны произвести оценку повреждений и доложить капитану;
- при отсутствии непосредственной опасности для своего судна, команда должна оказать посильную помощь другому судну;
- немедленно сообщить о произошедшем на ближайший спасательнокоординационный центр.
- после столкновения произвести замеры в льялах и танках;
- необходимо проверить, пробит ли корпус судна и, если да, то выяснить – ниже или выше ватерлинии;
- принять во внимания возможность затопления обоих судов при их расцеплении, особенно если судно понесло тяжёлые повреждения ниже ватерлинии;
- следует оценить манёвренность судов после их разъединения;
- в исключительных случаях следует рассмотреть возможность сброса груза за борт для сохранения плавучести и остойчивости.
Следующие действия необходимо фиксировать в судовом журнале:
- регистратор данных двигателя и журнал МО должны быть сохранены;
- следует отметить курс, которым должно было двигаться судно;
- следует зафиксировать время столкновения;
- следует зафиксировать координаты судна, время на мостике и в машинном отделении, а так же любую разницу в показаниях, если она есть;
- следует зафиксировать курс и скорость во время столкновения;
- следует зафиксировать угол, под которым столкнулись суда;
- следует зафиксировать все звуковые сигналы, произведённые одним судном и услышанные другим.
- зафиксировать информацию о судне, с которым произошло столкновение;
- получить объяснительные в письменном виде вахтенного помощника и других свидетелей столкновения.
Общие положения
В случае столкновения двух судов, обязанность каждого из капитанов сделать всё возможное, при этом не подвергая опасности своё судно, команду и пассажиров, чтобы:
- оказать помощь капитану, команде и пассажирам другого судна в пределах возможного, и оградить их от опасности, вызванной столкновением, и оставаться рядом с другим судном до тех пор, пока не будет установлено, что никакая дополнительная помощь не требуется;
- поделиться с капитаном другого судна информацией о названии своего судна, порте регистрации и прочей информацией, необходимой для записи в судовом журнале.
Угроза загрязнения
Если инцидент может привести к загрязнению или угрозе загрязнения, то необходимо принять дополнительные меры в соответствии с предписаниями Shipboard Oil Pollution Emergency Plan (SOPEP) или Vessel’s Response Plan (VRP), причём последний действует только в исключительной экономической зоне США.
Выбор и обоснование маневра для расхождения в заданной дистанции
ПРОКЛАДКА НА МАНЕВРЕННОМ ПЛАНШЕТЕ
1. Истинная прокладка.
2. Относительная прокладка.
3. Маневренный планшет.
4. Выбор и обоснование маневра для расхождения в заданной дистанции.
5. Учет инерции судна.
1. Способ относительного промежуточного курса.
2. Способ условной упрежденной точки.
3. Способ введения поправки в Dзад.
Учет инерции при маневре скоростью:
1. Способ построения кривой ОЛОД.
2. Способ введения поправки в Dзад.
3. Способ условной упрежденной точки (рис. 7).
4. Способ средней скорости.
Истинная прокладка
Такая прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем.
Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние D1, пускают секундомер, замечают судовое время Т1, курс своего судна Кн и отсчет лага ОЛ1. По пеленгу и расстоянию наносят местоположение эхо-сигнала А1 относительно своего местоположения, предварительно выбрав желаемый масштаб (рис. 1).
Через определенный промежуток времени (для расчетов удобен интервал в 3 или 6 мин) наблюдения повторяют (П2, D2, Т2, ОЛ2) и наносят местоположения своего судна 02 и наблюдаемого судна А2. Проведя через точки А2, и А2, прямую линию, получим линию истинного перемещения цели Кц.

По расстоянию между точками А 1и А2 и по времени Т1 и Т2 можно определить скорость цели Vц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна Тпер и Dпер.
Для определения расстояния кратчайшего сближения Dкр и времени до него tкр из точки А2 откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями А2F=O1O2. Отрезок O1С, проведенный перпендикулярно к линии, проходящей через точки A1, и F, будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки O1 и A4) можно найти параллельным перемещением отрезка O1С в положение O4A4. Время сближения на кратчайшее расстояние

Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако, чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (A1, А2, А3) на одной прямой и равенство расстояний А1А2=А2А3 свидетельствуют как об отсутствии промахов в наблюдениях, так и о неизменности элементов движения цели в период от T1 до Т3.
К достоинствам способа истинной прокладки следует отнести его наглядность. Недостатком является относительная трудоемкость графических построений, необходимых для определения основных обстоятельств встречи: дистанции кратчайшего сближения и времени до него.
Относительная прокладка
Эта прокладка получила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения.
Из точки О, принимаемой за место своего судна, прокладывают наблюденные пеленги П1 и П2 и по ним расстояния D1 и D2 (рис. 2), Через полученные точки А1, и А2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения Dкр. Время сближения на кратчайшее расстояние
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку перес
ечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную  до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. Dкр и tкр, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух перемещений — относительного  и судна-наблюдателя
и судна-наблюдателя  или
или 
Учитывая коммутативность суммы векторов  , можно находить
, можно находить  двумя способами.
двумя способами.
Построение векторного треугольника (см. рис. 2), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
В дальнейшем мы будем в основном пользоваться прямым построением, так как оно более удобно при решении задач расхождения.
Длина вектора движения судна-наблюдателя должна быть равна в выбранном масштабе плаванию своего судна за время между наблюдениями, принятыми для построения векторного треугольника. Длина полученного вектора движения цели соответствует плаванию цели за время между наблюдениями.
3. Маневренный планшет
Маневренный планшет представляет собой сетку полярных координат. Для ускорения расчетов, связанных с плаванием судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала. Она построена следующим образом: на прямой от начальной точки в некотором масштабе отложены отрезки, равные десятичным логарифмам чисел от 0,1 до 60 и оцифрованные в значениях этих чисел. Поскольку в пределах 60 единиц действия с минутами аналогичны действиям с числами в десятичной системе, любому отсчету на шкале можно присвоить наименование «Время», «Дистанция» или «Скорость» и по известным значениям двух из них найти третье, решая пропорцию

При этом, поскольку шкала логарифмическая, отрезки шкалы между значениями числителя из знаменателя в левой и правой частях пропорции равны между собой:

При пользовании логарифмической шкалой следует помнить, что «верхняя» ножка циркуля(устанавливаемая на большие отсчеты) всегда показывает время, а «нижняя»(устанавливаемая на меньшие отсчеты) — скорость и дистанцию.
Из наблюдений установлено относительное перемещение отметки — 2,2 мили за 8 мин. Найти относительную скорость.
Ставим нижнюю ножку циркуля на деление 2,2, а верхнюю — на деление шкалы «8»;
не меняя раствора циркуля, перемещаем верхнюю ножку циркуля на деление шкалы «60». Нижняя ножка циркуля покажет относительную скорость Vo=16.5 уз.
Пример 2
t=17 мин, V=15 уз. Найти расстояние S.
Ставим верхнюю ножку циркуля на деление «60», нижнюю — на «15»;
не меняя раствора циркуля, перемещаем верхнюю ножку циркуля на деление шкалы «17». Нижняя ножка циркуля покажет расстояние S=4.3 мили.
При V=17 уз судно прошло S=8,7 мили. Определить время, за которое судно проходит это расстояние.
Ставим верхнюю ножку циркуля на деление «60», а нижнюю — на деление шкалы «17»;
не меняя раствора циркуля, ставим нижнюю ножку циркуля на деление шкалы «8,7». Верхняя ножка циркуля покажет время t=31 мин.
Выбор и обоснование маневра для расхождения в заданной дистанции
Использование радиолокатора для расхождения
Обработка радиолокационной информации включает определенную последовательность действий:
• наблюдение и обнаружение целей;
• глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
• радиолокационную прокладку — определение элементов движения цели и параметров ситуации сближения;
• расчет маневра расхождения;
• контроль за изменением радиолокационной ситуацией во время маневра до полного расхождения судов.
Наблюдение и обнаружение целей. Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море постоянное наблюдение следует вести на шкалах среднего масштаба 8—16 миль с периодическим осмотром обстановки на шкалах как более мелкого, так и более крупного масштабов. В стесненных водах постоянное наблюдение обычно ведется на шкалах крупного масштаба с периодическим обзором обстановки на мелкомасштабных шкалах.
Глазомерная оценка радиолокационной ситуации. Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхо-сигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного сближения (ЛОД), по которой определяют дистанцию кратчайшего сближения Дкр.
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т.е. имеет достаточный навык работы на маневренном планшете.
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие три начальные ситуации.
1. Эхо-сигнал перемещается параллельно курсовой черте нашего судна — это может быть встречное судно, обгоняемое судно, обгоняющее судно или неподвижная цель:
• при изменении скорости одного или обоих судов параллельность перемещения эхо-сигнала сохраняется;
• при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
• разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
• эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2. Эхо-сигнал перемещается не параллельно курсовой черте:
— через начало развертки — существует опасность столкновения;
— через курсовую линию нашего судна — цель пересекает нашкурс;
— по линии, проходящей по корме нашего судна, — наше судно пересечет или уже пересекло курс цели:
• при изменении направления или скорости перемещения эхосигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
• разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
• уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
• увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
• отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближения, увеличивается tкр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3. Эхо-сигнал не перемещается — судно-сателлит:
• появление следа послесвечения параллельно курсовой черте —изменение скорости одного или обоих судов;
• изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
Радиолокационная прокладка. Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора – насколько опасна наблюдаемая цель.
Степень опасности оценивается по двум критериям:
1. Дкр – дистанция кратчайшего сближения – минимальное расстояние, на которое цель может приблизиться к нашему судну, если
никто не будет изменять элементы своего движения (курс и скорость);
2. tкр – интервал времени до точки кратчайшего сближения – интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции
кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
Построение треугольника скоростей
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости нашего судна, равный 6-ти минутному отрезку (например, скорость нашего судна 15 узлов, откладываем по курсу 1, 5 мили);
2. делаются замеры пеленга и дистанции встречного судна;
3. в таблицу записываются данные измерения и на планшет наносится первая точка – А1;
4. в полученную точку параллельно переносится и “втыкается” вектор скорости нашего судна;
5. через 3 минуты повторяются пункты 2-3, наносится вторая точка А2. Приближенно оценивается ситуация сближения;
6. еще через 3 минуты повторяются пункты 2-3, наносится третья точка А3;
7. соединив точки А1 – А2 – А3, получаем линию относительного движения – ЛОД;
8. из начала нашего вектора скорости строим вектор Vв, который является вектором истинной скорости и курса встречного судна;
9. перпендикуляр, проведенный из центра планшета к ЛОД определяет Дкр (в нашем случае Дкр = 1,7 мили). Величину tкр находим, откладывая по ЛОД отрезки, равные V0 до Дкр (здесь, примерно, укладывается 1,5 V0, т.е. tкр = 1,5 х 6 мин = 9 мин);
10.принимается решение по выбору маневра расхождения.
 Построение треугольника скоростей
Построение треугольника скоростей
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.
 Расчет маневра курсом
Расчет маневра курсом
Маневр расхождения скоростью
1. Необходимо на ЛОД нанести упреждающую точку У – положение цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. ОЛОД «отсекает» часть вектора нашего судна. Отрезок от начала вектора до точки пересечения с ОЛОД откладываем на векторе в
центре планшета. Это и есть новая скорость нашего судна, необходимая для расхождения на заданной дистанции.
5. Снижение скорости необходимо начинать заранее – до наступления момента У, с тем, чтобы в этот момент судно уже имело новую скорость.
 Маневр расхождения скоростью
Маневр расхождения скоростью
Маневр расхождения скоростью применим для судов водоизмещением до 20000 тонн. В любом случае, при выполнении маневра расхождения необходимо учитывать маневренные характеристики судна.
При выборе маневра расхождения с опасной целью, когда на экране наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для всех потенциально опасных судов. Как правило, на планшет наносится полный анализ ситуации до момента окончания маневра и возвращения к исходным параметрам движения вашего судна.