Если у кривой l определить положение центров кривизны для ряда принадлежащих ей точек и соединить их плавной кривой, то полученную кривую m называют эволютой кривой l.
Если у кривой l определить положение центров кривизны для ряда принадлежащих ей точек и соединить их плавной кривой, то полученную кривую m называют эволютой кривой l.
Для графического нахождения центра кривизны кривой в заданной точке А можно использовать свойство, что окружность кривизны имеет общую точку с кривой l, нормалью n и касательной t — точку касания А.
Использую это свойство задача решается в следующем порядке:
1. Выбираем на кривой l ряд произвольных точек А, В, С, и т.д.;
3. Отложим на полукасательных равные отрезки произвольной длины, получим точки А1, В1, С1 и т.д.;
4. Через полученные точки проведем плавную кривую l1;
7. Точки пересечения нормалей 0А, 0В, 0Си т.д. определят положение центров кривизны для точек А, В, С, и т.д. кривой l;
8. Плавная кривая m, проходящая через полученные центры кривизны кривой l— эволюта данной кривой.
Эвольвента
Эвольвентой окружности называется траектория точки прямой линии, когда эта прямая перекатывается без скольжения по окружности.
Эвольвентой окружности называется траектория точки прямой линии, когда эта прямая перекатывается без скольжения по окружности.
Построения эвольвенты выполняется в следующей последовательности:
1. Заданную окружность делят на несколько равных частей (к примеру на 12), которые пронумеруем 1, 2, . 12;
2. Из конечной точки 12 проводят касательную к окружности и откладывают на ней длину окружности, равную pD;
3. Полученный отрезок (длину окружности) делят также на 12 равных частей;
4. Из точек деления окружности проводят касательные и на них откладывают отрезки 111=pD/12, 221=2pD/12, 331=3pD/12, . 12121=pD;
Эволюта и эвольвента окружности
Если радиус-вектор центра кривизны обозначить через (requireboldsymbol,) то [boldsymbol = mathbf + mathbf = mathbf + Rmathbf.] Вектор нормали (mathbf) определяется выражением [ <mathbf= fracfrac <<dboldsymbol>><> > = <fracfrac<<mathbf>><<d>> > = <Rfrac<<mathbf>><<d>>,> ] где (boldsymboltau) − единичный вектор касательной. Следовательно, положение центра кривизны, соответствующее точке (M,) описывается формулой [ <boldsymbolrho = mathbf+ Rmathbf > = <mathbf+ frac<<mathbf>><<d>>.> ] Для каждой точки кривой (при условии (K ne 0)) можно найти свой центр кривизны. Множество всех центров кривизны кривой (gamma) называется эволютой этой кривой.
Если кривая () − эволюта кривой (gamma,) то исходная кривая (gamma) называется эвольвентой кривой (.)
Обозначим центр кривизны точкой (C) в координатами (left( right).) Если кривая (gamma) задана в параметрической форме [ ;;; ;;; ] то координаты центра кривизны (left( right)) вычисляются по формулам [ <xi = x — y'frac<<<<left( right)>^2> + <<left( right)>^2>>><>,>;;; <eta = y + x'frac<<<<left( right)>^2> + <<left( right)>^2>>><>.> ] Эти формулы следуют из выражения для радиуса-вектора (boldsymbolrho.)
В случае, если кривая (gamma) является графиком функции (y = fleft( x right),) координаты центра кривизны выражаются в виде [ <xi = x — frac<<1 + <<left( right)>^2>>><>y’,>;;; <eta = y + frac<<1 + <<left( right)>^2>>><>.> ] Отметим, что условие ненулевой кривизны во всех точках кривой является достаточно жестким. В результате исключаются из анализа, например, кривые с точками перегиба . Поэтому иногда рассматривается более общий случай произвольной кривизны. Если в какой-либо точке кривизна равна нулю, то эволюта в этой точке имеет разрыв. Такой случай схематически показан на рисунке (2.)
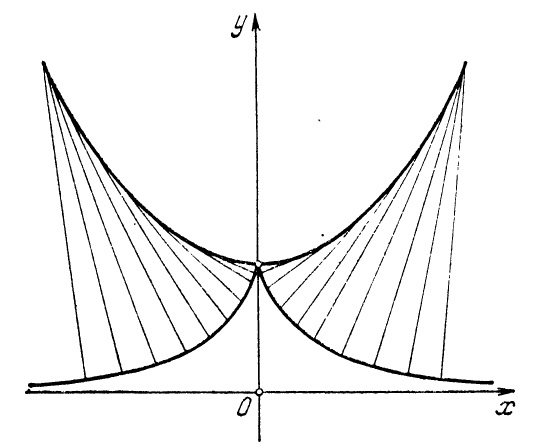
Парабола и ее эволюта схематически показаны на рисунке (4.) Найденная эволюта по форме напоминает ласточкин хвост и представляет собой полукубическую параболу .
Данная кривая в декартовых координатах описывается следующей системой уравнений: [ <x = rcos theta = cos theta ,>;;; <y = rsin theta = sin theta .> ] Такая запись представляет собой параметрическую форму уравнения кривой, где роль параметра играет угол (theta). Тогда координаты центра кривизны можно найти по формулам [ <xi = x — y'frac<<<<left( right)>^2> + <<left( right)>^2>>><>,>;;; <eta = y + x'frac<<<<left( right)>^2> + <<left( right)>^2>>><>.> ] Вычислим производные: [ <x' = <left( <cos theta > right)^prime > > = <cos theta — sintheta > = <left( right);> ] [ <x'' = left[ <left( right)> right]^prime > = <left( right) + left( right) = left( <cancel- sintheta — sintheta — cancel > right) > = < — 2sintheta ;> ] [ <y' = <left( <sin theta > right)^prime > > = <sin theta + costheta > = <left( right);> ] [ <y'' = left[ <left( right)> right]^prime > = <left( right) + left( right) = left( <cancel+ costheta + costheta — cancel > right) > = < 2costheta .> ] Выражения для (xi) и (eta) содержат общую дробь, которая равна [ <F = frac<<<<left( right)>^2> + <<left( right)>^2>>><> > = <frac<<<<left[ <left( right)> right]>^2> + <<left[ <left( right)> right]>^2>>><<left( right) cdot 2cos theta — left( < — 2sintheta > right) cdot left( right)>> > = <frac cdot frac<<<^2>theta — cancel + <^2>theta + <^2>theta + cancel + <^2>theta >><<<^2>theta — cancel + <^2>theta + cancel >> > = <frac cdot frac = 1.> ] Следовательно, координаты центра кривизны (xi) и (eta) определяются формулами [ <xi = x — y'frac<<<<left( right)>^2> + <<left( right)>^2>>><> > = = <cos theta — left( right) > = < — sintheta = — y;> ] [ <eta = y + x'frac<<<<left( right)>^2> + <<left( right)>^2>>><> > = = <sin theta + left( right) > = < costheta = x.> ] Таким образом, если взять исходную систему координат () и повернуть ее на (largefracnormalsize) против часовой стрелки, то мы получим координатную систему (.) При этом ось (left( right)) перейдет в горизонтальную ось (xi,) а ось (x) перейдет в вертикальную ось (eta.) Другими словами, эволютой логарифмической спирали (r = ) является та же самая кривая, повернутая на угол (largefracnormalsize) против часовой стрелки.
Выразим координаты центра кривизны (xi) и (eta) через переменную (tau:) [ = <tau + pi + sin left( right) > = <left[ right] + pi ;> ] [ = <cos left( right) — 1 > = = <left[ right] — 2.> ] Итак, эволюта циклоиды также является циклоидой. Ее положение относительно исходной кривой смещено на вектор (left( right).) Кроме того, вследствие замены (t to tau,) циклоида эволюты начинается с середины арки.
Эвольвента окружности по форме похожа на спираль (рисунок (5)). Она описывает траекторию любой точки прямой, которая перекатывается по окружности. Эвольвентная форма используется, в частности, в технике при конструировании зубчатых передач (рисунок (6)).
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Соприкасающаяся окружность. Эволюта, эвольвента
Разбор ДЗ
2. Найти кривизну и кручение кривой, заданной в неявном виде: $-x^2+y^2+z^2=1$, $-x^2+2y-z=0$ в точке $M(1,,1,,1)$.
Ответ: $k=displaystylefrac<sqrt>$, $varkappa=1$.
3. Доказать, что кривая $x=1+2t+t^2, y=2-5t+t^2, z=1+t^2$
— плоская. Найти уравнение плоскости, в которой лежит эта кривая.
Ответ: $varkappa=0$, $5x+2y-7z-2=0$.
Краткие теоретические сведения
Соприкосновение $k$-того порядка
Две кривые $$ gamma_1: vec_1=vec_1(t),, mbox ,, gamma_2: vec_2=vec_2(t) $$ имеют в общей точке $M_0$ соприкосновение (касание) $k$-того порядка, если в этой точке: begin frac<dvec_1>
=frac<dvec_2>
, ldots, frac<d^kvec_1>
=frac<d^kvec_2>
,, frac<d^vec_1>
neqfrac<d^vec_2>
. end
Для неявно заданных кривых — см. формулы в Феденко.
Касательная кривой имеет в точке касания имеет соприкосновение первого порядка.
Соприкасающаяся окружность плоской кривой
Пусть $gamma$ — плоская кривая, $M_0 (t=t_0)$ — точка на ней.
Окружность, проходящая через точку $M_0$, называется соприкасающейся окружностью кривой $gamma$ в точке $M_0$, если кривая в этой точке с окружностью имеет соприкосновение второго порядка (не ниже второго порядка).
Центр соприкасающейся окружности называют центром кривизны кривой в заданной точке.
Центр окружности лежит на нормали к кривой. Радиус окружности (радиус кривизны) есть величина, обратная кривизне этой кривой в заданной точке $M_0$: $$ R=1/k(t_0).$$
Эволюта и эвольвента
Эволютой плоской кривой называется огибающая ее нормалей.
Эволюта это геометрическое место центров кривизны плоской кривой.
Эвольвентой плоской кривой $gamma$ называется такая кривая $Gamma$ по отношению к которой $gamma$ является эволютой.
Решение задач
Задача 1 (Феденко № 179)
Докажите, что линии begin y_1=mbox,x, ,, y_2=x^4-frac16x^3+x. end имеют в начале координат касание третьего порядка
Решение задачи 1
Задача 2 (Феденко №369)
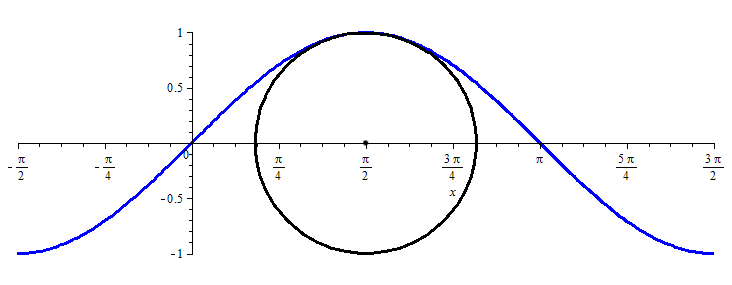
Напишите уравнение соприкасающейся окружности линии $y=mbox,x$ в точке $Aleft(frac; 1right)$.
Решение задачи 2
Радиус соприкасающейся плоскости $R=displaystylefrac$. Найдем кривизну для заданной кривой: begin k = displaystylefrac<left(1+(y')^2right)^>=frac<mbox,x><(1+mbox^2,x)^>. end begin kleft(fracright)=1 ,, Rightarrow ,, R=1. end Учитывая, что окружность касается синусоиды в точке $Aleft(displaystylefrac; 1right)$, радиус окружности равен $1$ и центр окружности лежит на нормали, проведенной в точке касания, получаем следующее уравнение: begin left(x-displaystylefracright)^2+y^2=1. end
Задача 3 (Феденко №391)
Составьте уравнения и начертите эволюту кривой begin x=aleft(mbox,mbox,left(displaystylefracright)+mbox,tright), ,, y = a,mbox,t. end
Решение задачи 3
Задача 4 (Феденко №397)
Составьте уравнения эвольвент окружности $x^2+y^2=a^2$ и сделайте рисунок.
Решение задачи 4
Запишем параметрическое уравнение окружности: begin x=a,mbox,t, ,, y=a,mbox,t. end