Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
«Актуальность создания школьных служб примирения/медиации в образовательных организациях»
Свидетельство и скидка на обучение каждому участнику

Самые массовые международные дистанционные
Школьные Инфоконкурсы 2022
33 конкурса для учеников 1–11 классов и дошкольников от проекта «Инфоурок»
- Описание презентации по отдельным слайдам:
- Краткое описание документа:
- Дистанционное обучение как современный формат преподавания
- Педагогическая деятельность в контексте профессионального стандарта педагога и ФГОС
- Инструменты онлайн-обучения на примере программ Zoom, Skype, Microsoft Teams, Bandicam
- Дистанционные курсы для педагогов
- Найдите материал к любому уроку, указав свой предмет (категорию), класс, учебник и тему:
- Другие материалы
- Вам будут интересны эти курсы:
- Оставьте свой комментарий
- Автор материала
- Дистанционные курсы для педагогов
- Подарочные сертификаты
- Управление движением робота
- Варианты передвижения робота на колесах
- Робот за 3 минуты
- Расчет числа оборотов
- Разворот на месте
- Поворот вокруг одного колеса
- Движение по окружности произвольного диаметра
- Движение по линии с объездом препятствия (кирпич)
- Движение робота ev3 вперед повороты
- Повороты робота EV3.Программа для поворота робота ev3
- Движение робота EV3 назад
Описание презентации по отдельным слайдам:

Движение по геометрическим фигурам Учитель: Кривенцов Леонид Александрович, первая квалификационная категория Асино — 2014 Тема урока:
Повторение пройденного материала Какие виды алгоритмов мы знаем? Линейный алгоритм Циклический алгоритм Разветвляющийся алгоритм
Для какого вида алгоритмов используются следующие блоки из среды программирования NXT-G? Линейный алгоритм Разветвляющийся алгоритм Циклический алгоритм
Какие действия может выполнить робот NXT с помощью блока «Движение»? Ехать вперед Ехать назад Поворот влево Поворот вправо Свободный поворот (любой угол) Разворот
Какие простейшие геометрические фигуры вы знаете?
Укажите, какие углы могут быть у указанных геометрических фигур: 90º 45º 60º 30 Треугольник Квадрат Ромб Прямоугольник
Каким образом можно повернуть робота NXT на определенный угол? Остановить одно колесо, при вращении другого Задать одному колесу движение вперед, а другому – движение назад
Задание 1 Составить программу для движения робота по квадрату с заданной стороной Вопрос: какие виды алгоритмов можно использовать для выполнения предложенного задания? Ответ: линейный и циклический алгоритмы
Задание 2 Составить программу для движения робота по треугольнику с заданными сторонами Вопрос: в каком случае возможно использовать циклический алгоритм для выполнения предложенного задания? Ответ: в случае когда стороны треугольника будут равны
Задание 3 (дополнительное) Составить программу для движения робота по кругу с заданным диаметром
Домашнее задание Повторить виды алгоритмов; Составить в тетради блок-схему движения робота NXT по заданной траектории. Пример:
Краткое описание документа:
Данная презентация полезна для практической работы на занятии по робототехнике как урочном, так и внеурочном. В начале занятия предусмотрен устный опрос (повторение пройденного материала). Предполагается, что обучающиеся уже знают виды алгоритмов, среду программирования NXT-G и основные ее блоки, знакомы с простейшими алгоритмами, позволяющими двигаться роботу с помощью блока «Движение». Занятие является интегрированным, т.к. явно прослеживается связь с геометрией и математикой. Для проведения более эффективного занятия, учитывая различную степень подготовки обучающихся предусмотрено выполнение задания повышенной сложности (задание 3).

Курс повышения квалификации
Дистанционное обучение как современный формат преподавания
- Сейчас обучается 963 человека из 80 регионов
Курс повышения квалификации
Педагогическая деятельность в контексте профессионального стандарта педагога и ФГОС
- Курс добавлен 23.11.2021
- Сейчас обучается 50 человек из 30 регионов
Курс повышения квалификации
Инструменты онлайн-обучения на примере программ Zoom, Skype, Microsoft Teams, Bandicam
- Курс добавлен 31.01.2022
- Сейчас обучается 32 человека из 18 регионов
Ищем педагогов в команду «Инфоурок»
Дистанционные курсы для педагогов
Найдите материал к любому уроку, указав свой предмет (категорию), класс, учебник и тему:
5 555 712 материалов в базе
Другие материалы
- 26.03.2014
- 650
- 0
- 26.03.2014
- 2290
- 7
- 26.03.2014
- 799
- 0
- 26.03.2014
- 2949
- 9
- 26.03.2014
- 2459
- 25
- 26.03.2014
- 4152
- 14
- 26.03.2014
- 1426
- 0
Вам будут интересны эти курсы:
Оставьте свой комментарий
Авторизуйтесь, чтобы задавать вопросы.
Добавить в избранное
- 26.03.2014 1277
- PPTX 1024 кбайт
- 5 скачиваний
- Оцените материал:
Настоящий материал опубликован пользователем Кривенцов Леонид Александрович. Инфоурок является информационным посредником и предоставляет пользователям возможность размещать на сайте методические материалы. Всю ответственность за опубликованные материалы, содержащиеся в них сведения, а также за соблюдение авторских прав несут пользователи, загрузившие материал на сайт
Если Вы считаете, что материал нарушает авторские права либо по каким-то другим причинам должен быть удален с сайта, Вы можете оставить жалобу на материал.
Автор материала

- На сайте: 7 лет и 2 месяца
- Подписчики: 0
- Всего просмотров: 37534
- Всего материалов: 10
Московский институт профессиональной
переподготовки и повышения
квалификации педагогов
Дистанционные курсы
для педагогов
663 курса от 690 рублей
Выбрать курс со скидкой
Выдаём документы
установленного образца!

Учителя о ЕГЭ: секреты успешной подготовки
Время чтения: 11 минут
Полный перевод школ на дистанционное обучение не планируется
Время чтения: 1 минута
В Госдуме предложили ввести пост уполномоченного по правам учителей
Время чтения: 2 минуты
У 76% российских учителей оклад ниже МРОТ
Время чтения: 2 минуты
В России могут объявить Десятилетие науки и технологий
Время чтения: 1 минута
Петербургская учительница уволилась после чтения на уроке Введенского и Хармса
Время чтения: 3 минуты
Новые курсы: управление детским садом, коучинг, немецкий язык и другие
Время чтения: 18 минут
Подарочные сертификаты
Ответственность за разрешение любых спорных моментов, касающихся самих материалов и их содержания, берут на себя пользователи, разместившие материал на сайте. Однако администрация сайта готова оказать всяческую поддержку в решении любых вопросов, связанных с работой и содержанием сайта. Если Вы заметили, что на данном сайте незаконно используются материалы, сообщите об этом администрации сайта через форму обратной связи.
Все материалы, размещенные на сайте, созданы авторами сайта либо размещены пользователями сайта и представлены на сайте исключительно для ознакомления. Авторские права на материалы принадлежат их законным авторам. Частичное или полное копирование материалов сайта без письменного разрешения администрации сайта запрещено! Мнение администрации может не совпадать с точкой зрения авторов.
Управление движением робота
Варианты передвижения робота на колесах
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
Программа для Lego EV3 для движения робота на заданное количество оборотов.
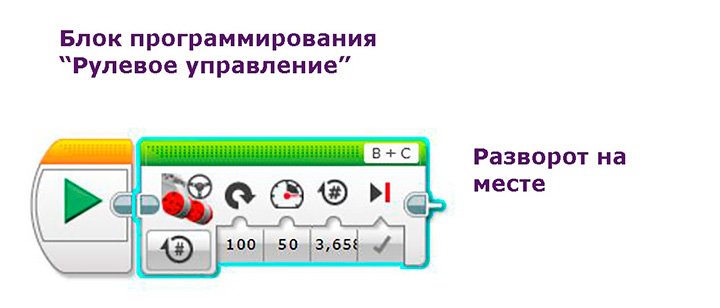
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
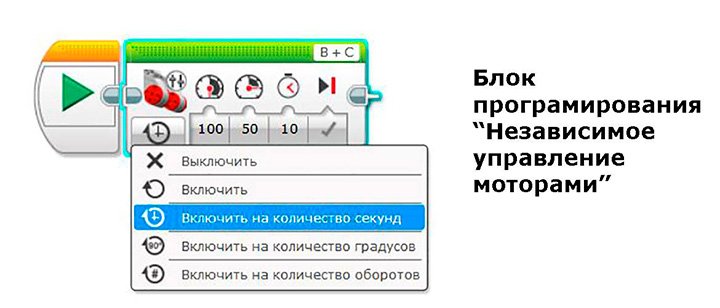
- При втором способе используется блок «Независимое управление моторами».
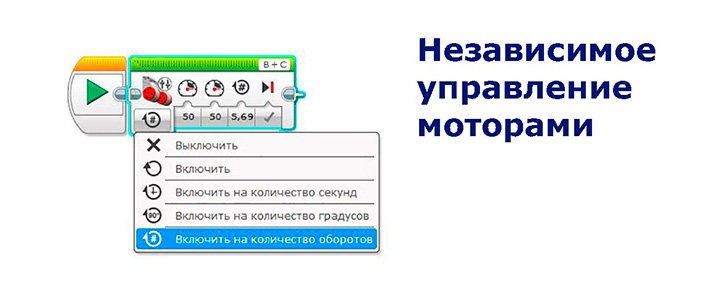 независимое управление движение вперед на один метр
независимое управление движение вперед на один метр
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.
 робот тележка лего
робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
Разворот на месте
- Разворот робота на 360 градусов
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или — 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
 разворот робота на месте рулевое управление
разворот робота на месте рулевое управление
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
 разворот робота на месте независимое управление
разворот робота на месте независимое управление
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
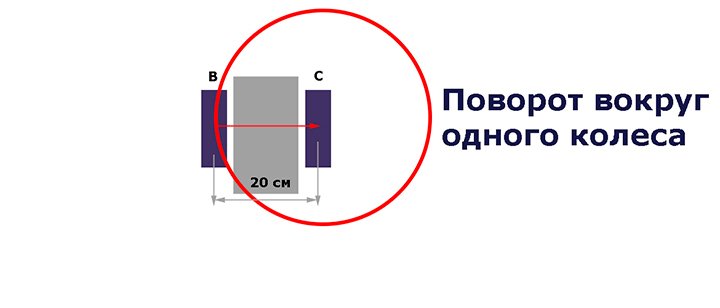
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
 Поворот робота вокруг одного колеса
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
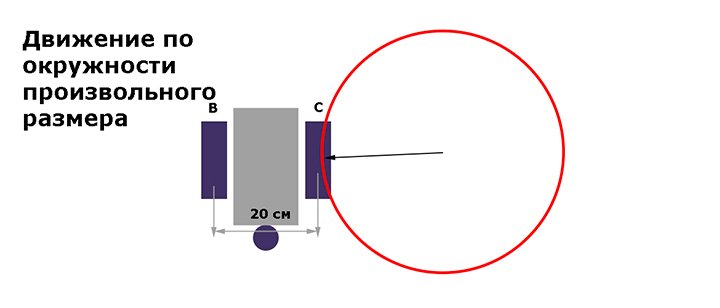 Движение робота по окружности произвольного размера
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
 Независимое управление моторами Lego EV3 произвольная окружность
Независимое управление моторами Lego EV3 произвольная окружность
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Движение по линии с объездом препятствия (кирпич)
Движение робота ev3 вперед повороты
| 14.09.2019, 20:24 , , Администратор |
На данном уроке мы познакомимся с понятием линейного алгоритма, разберемся, как программировать движение робота Ev3.Линейный алгоритм это набор последовательных команд, которые выполняются только один раз. Команды следуют одна за другой в строго заданном порядке.
Например, рассмотрим алгоритм движения робота по квадрату.
Движение вперед на 1 оборот
Поворот робота на 90 градусов направо
Движение вперед на 1 оборот
Поворот робота на 90 градусов направо
Движение вперед на 1 оборот
Поворот робота на 90 градусов направо
Движение вперед на 1 оборот
Перед тем как реализовывать линейные алгоритмы движения познакомился, как программировать простейшие команды движения робота EV3.
Движение вперёд робота ev3.
1 действие. Движение вперёд робота ev3. Моторы робоат ev3 подключаются к портам с буквами: A B C D Все повороты делаются на мощностях меньше 50.
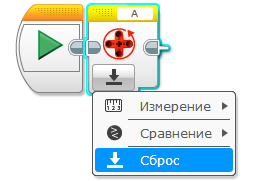
Сбрасываем датчик моторов в ev3.
2 действие. Ставим цикл и в него ставим моторы на режиме «включить».
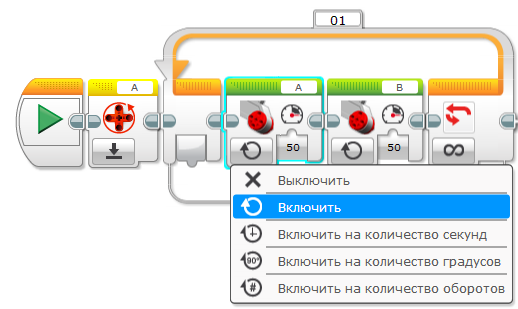
3 действие. Выставляем мощность мотора на 100.
4 действие. Заходим в цикл, выставляем вращение мотора «градусы».
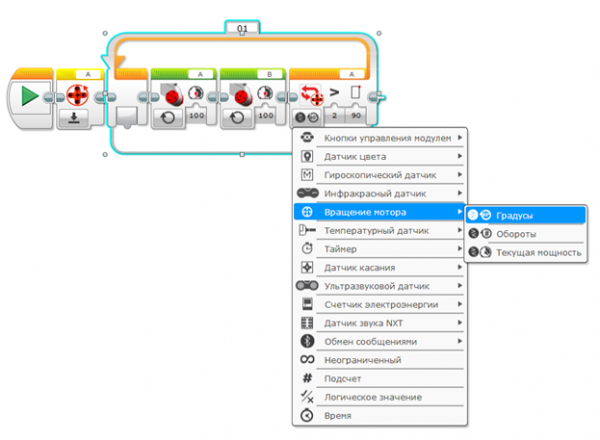
5 действие. Полный оборот колеса 360 градусов.
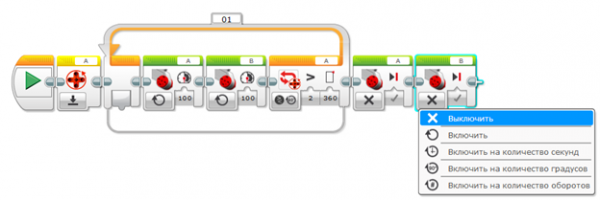
6 действие. Остановка моторов в режиме «выключить».
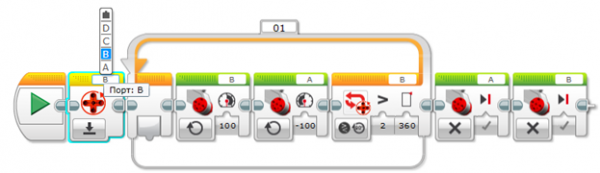
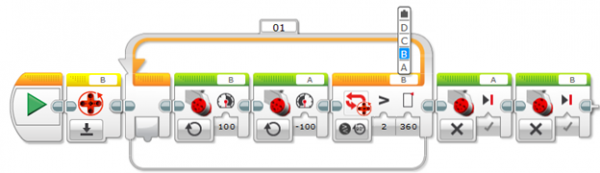
Повороты робота EV3.Программа для поворота робота ev3
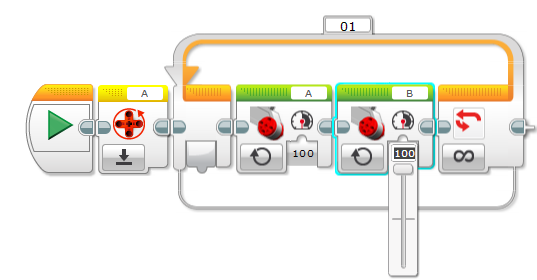
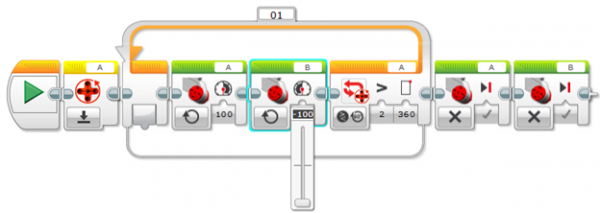
1 действие. Чтобы робот вращался на месте как трактор используется реверсивный поворот , когда один мотор двигается в одну сторону, а другой в противоположную. Чтобы мотор начал вращаться назад , необходимо выставить мощность -100.
Поворот робота ev3 в другую сторону
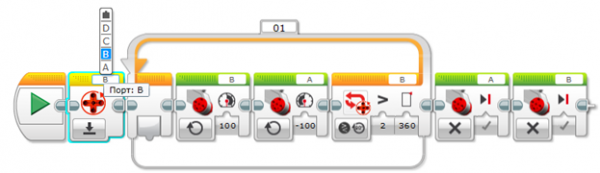
1. действие. Чтобы поворачивать в другую сторону , необходимо поменять мощности моторов . Теперь мотор с портом A будет с отрицательной мощностью.
3 действие. Меняем порт мотора в конце цикла.
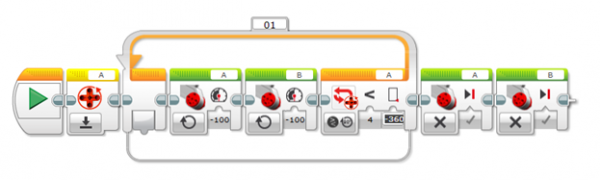
Движение робота EV3 назад
Чтобы обеспечить движение робота ev3 назад, устанавливаем отрицательную мощность обоих моторов .
Действие 1. В условии цикла необходимо будет поставить знак «меньше».
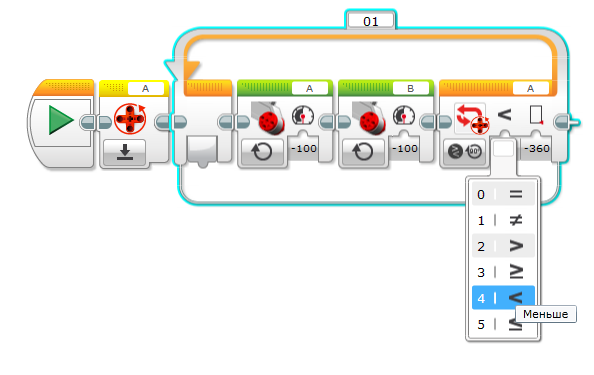
Действие 2. Ставим отрицательные значения градусов.
Задание на урок
1. Собрать робота Ev3 на двух моторах,
2. Запрограммировать движение по квадрату
3. Запрограммировать трассу «змейка», объехать две кегли.